Изобретение относится к измерительной технике и может ,быть использовано для измерения зависимости пускового момента электродвигателя от положения ротора.
Целью изобретения является повышение точности.
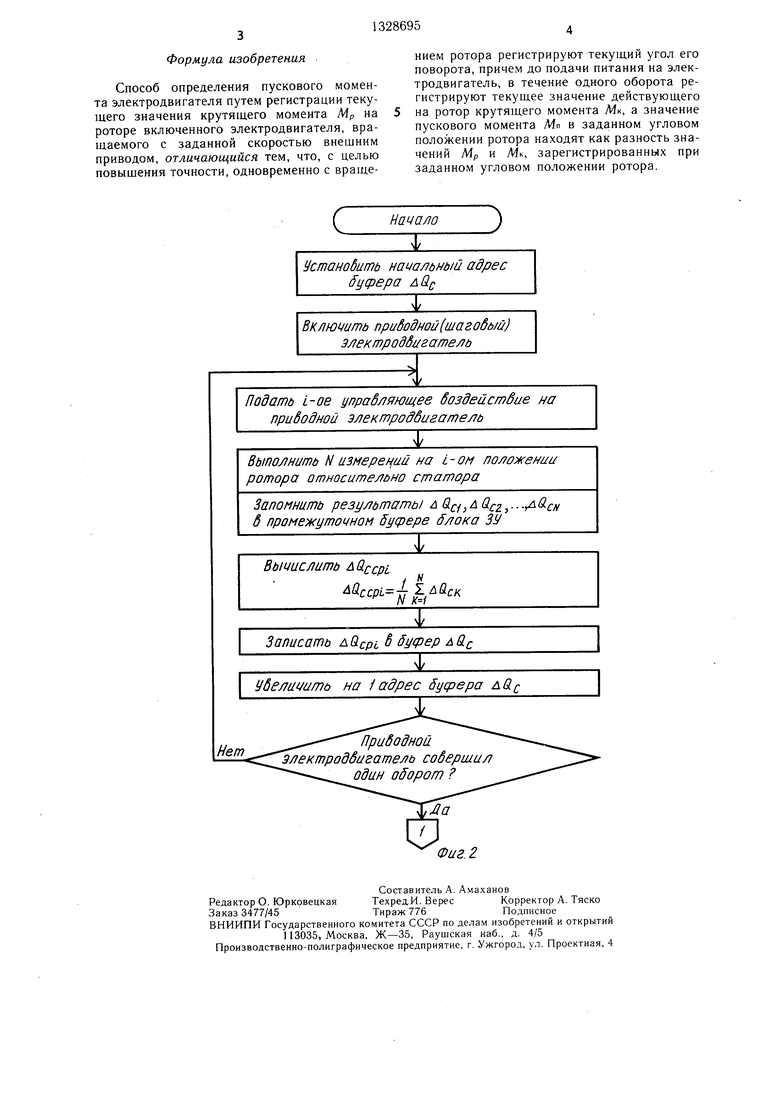
На фиг. 1 представлена структурная схема устройства для реализации способа; на фиг. 2 - алгоритм работы устройства.
Предлагаемый способ определения пускового момента электродвигателя заключается в том, что ротор электродвигателя вращают с заданной скоростью с помощью внешнего привода и одновременно регистрируют угловое положение ротора и крутящий момент на нем. При этом в течение первого оборота испытуемый электродвигатель обесточен, а в течение второго запитая.
Значение пускового момента Мп в заданном угловом положении ротора находят как разность
Mn MfMX,
где Мр и MX -соответственно крутящий момент на роторе запитанного и обесточенного двигателя в заданном угловом положении ротора.
Устройство для реализации предлагаемого способа содержит основание 1, приводной электродвигатель 2, вал которого установлен в основании 1 на подщипниках 3, датчик 4 силы, установленный на основании 1 и соединенный со статором приводного двигателя 2 рычагом 5, и измерительно-управляющую систему 6, включающую в себя микро-ЭВМ 7, пусковое устройство 8, блок 9 управления, регистрирующий прибор 10, системную шину 11, подключенную к микро-ЭВМ 7, и блок 12 сопряжения, подключенный к системной шине 11, датчику 4 силы, пусковому устройству 8, регистрирующему прибору 10 и через блок 9 управления к приводному электродвигателю 2.
При этом микро-ЭВМ 7 включает в себя процессор 13, блок 14 запоминающего устройства и видеотерминал 15. Приводной электродвигатель 2 выполнен шаговым.
Способ осуществляют следующим образом.
Испытуемый электродвигатель 16 устанавливают на основание 1 и его ротор с помощью муфты 17 сочленяют с валом приводного электродвигателя 2, а цепи питания соединяют с выходом пускового устройства 8, которое подключают к электрической сети.
Перед включением приводного электродвигателя 2 в блоке 14 запоминающего устройства устанавливается начальный адрес и длина буфера, в котором будут храниться значения силы сопротивления AQcp,-. Затем процессор 13 микро-ЭВМ 7 переходит на программу запуска блока 9 управления приводом. Проворачивание ротора испытуемого
1328695
электродвигателя 16 на угол а осуществляется путем подачи г-го управляющего воздействия на приводной (шаговый) электродвигатель 2 через блок 9 управления, который 5 работает под управлением процессора 13 микро-ЭВМ 7.
Приводной электродвигатель 2 приводит во вращательное движение через муфт.у 17 ротор испытуемого электродвигателя 16. При
этом на работу устройства оказывают влияние диссипативные силы, представляющие собой силы трения в подщипниках испытуемого 16 и приводного 2 электродвигателей, силы внутреннего трения, обусловлен 5 ные неидеальностью жесткого соединения муфты 17, а также силы трения в подшипниках 3. Эта сила AQ создает момент сопротивления MX относительно оси ротора приводного электродвигателя 2, который передается на его статор и посредством рычага 5
20 с длиной плеча / действует на датчик 4 силы. На выходе последнего появляется напряжение, пропорциональное силе сопротивления AQc, которое через аналого-цифровой преобразователь блока 12 сопряжения записы с вается в буфере блока 14 запоминающего устройства.
Для исключения погрещности, связанной с неравномерностью скорости вра1цения вала приводного двигателя 2 в течение шага, в пределах одного тага производится п изме2Q рений силы, по которым находится среднее значение силы за шаг (фиг. 2). Это значение записывается в буфер блока 14 запо- минаю цего устройства, в котором по завершении полного оборота ротора испытуемого электродвигателя 16 накапливается мас25 сив значений AQc,- При этом адрес каждого буфера блока 14 запоминающего устройства, в котором хранится текущее значение AQc;, соответствует текущему значению угла а, поворота ротора испытуемого электродвигателя 16.
40 После этого в момент прохождения одной из фаз питающей сети через ноль пусковое устройство 8 подает питание на испытуемый электродвигатель 16. При этом на датчик 4 силы начинает действовать сила Qp, и напряжение на выходе датчика 4 силы, пропорциональное QP, через аналого-цифровой преобразователь блока 12 сопряжения записывается в соответствующем буфере блока 14 запоминающего устройства.
После завершения полного оборота ро50 тора испытуемого электродвигателя 16 последний обесточивается, при этом в блоке 14 запоминающего устройства помимо массива AQc/ накапливается массив значений Qpc, так же упорядоченный по номерам шага приводного электродвигателя 2.
55 После этого с помощью микро-ЭВМ 7 вычисляется массив значений
Mn,-(Q,,-дд„) . /.
Приводной электродвигатель 2 приводит во вращательное движение через муфт.у 17 ротор испытуемого электродвигателя 16. При
этом на работу устройства оказывают влияние диссипативные силы, представляющие собой силы трения в подщипниках испытуемого 16 и приводного 2 электродвигателей, силы внутреннего трения, обусловлен5 ные неидеальностью жесткого соединения муфты 17, а также силы трения в подшипниках 3. Эта сила AQ создает момент сопротивления MX относительно оси ротора приводного электродвигателя 2, который передается на его статор и посредством рычага 5
0 с длиной плеча / действует на датчик 4 силы. На выходе последнего появляется напряжение, пропорциональное силе сопротивления AQc, которое через аналого-цифровой преобразователь блока 12 сопряжения записыс вается в буфере блока 14 запоминающего устройства.
Для исключения погрещности, связанной с неравномерностью скорости вра1цения вала приводного двигателя 2 в течение шага, в пределах одного тага производится п измеQ рений силы, по которым находится среднее значение силы за шаг (фиг. 2). Это значение записывается в буфер блока 14 запо- минаю цего устройства, в котором по завершении полного оборота ротора испытуемого электродвигателя 16 накапливается мас5 сив значений AQc,- При этом адрес каждого буфера блока 14 запоминающего устройства, в котором хранится текущее значение AQc;, соответствует текущему значению угла а, поворота ротора испытуемого электродвигателя 16.
0 После этого в момент прохождения одной из фаз питающей сети через ноль пусковое устройство 8 подает питание на испытуемый электродвигатель 16. При этом на датчик 4 силы начинает действовать сила Qp, и напряжение на выходе датчика 4 силы, пропорциональное QP, через аналого-цифровой преобразователь блока 12 сопряжения записывается в соответствующем буфере блока 14 запоминающего устройства.
После завершения полного оборота ро0 тора испытуемого электродвигателя 16 последний обесточивается, при этом в блоке 14 запоминающего устройства помимо массива AQc/ накапливается массив значений Qpc, так же упорядоченный по номерам шага приводного электродвигателя 2.
5 После этого с помощью микро-ЭВМ 7 вычисляется массив значений
Mn,-(Q,,-дд„) . /.
Формула изобретения
Способ определения пускового момента электродвигателя путем регистрации текущего значения крутящего момента Мр на роторе включенного электродвигателя, вращаемого с заданной скоростью внешним приводом, отличающийся тем, что, с целью повыщекия точности, одновременно с вращеУстанобить начальный адрес буфера лис
прибоднои(шагоббш) электродбигате/ ь
Подать L-oe ипрадляющее боздейстбае на придодной электродбигате/Jb
Выполнить N измерений на L-OM положении ротора относительно статора
Запомнить результаты ., б промежуто ном буфере 5лока ЗУ
Вычислить Auccpi
N
QCK
Записать А QCPL Зуфер л Q.Q
Убели1 ать на i адрес буер ера л 5
Нет
Прибодной электроддигатель собершил один оборот
нием ротора регистрируют текущий угол его поворота, причем до подачи питания на электродвигатель, в течение одного оборота регистрируют текущее значение действующего на ротор крутящего момента Мк, а значение пускового момента Мп в заданном угловом положении ротора находят как разность значений Мр и Мк, зарегистрированных при заданном угловом положении ротора.
Нацало
N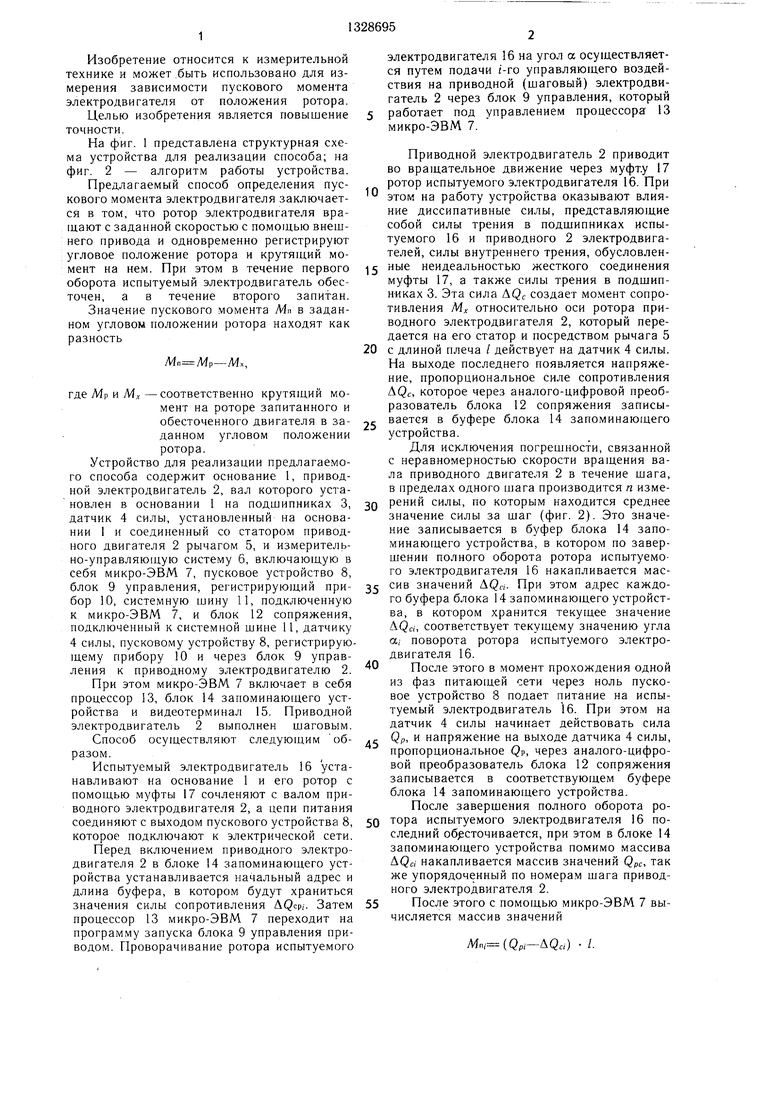
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ градуировки измерителя крутящего момента | 1987 |
|
SU1566237A1 |
| Стенд для испытания электродвигателей | 1991 |
|
SU1812468A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1988 |
|
SU1683244A1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ФРИКЦИОННОЙ УСТАЛОСТИ ПОВЕРХНОСТЕЙ ПРИ ЛИНЕЙНОМ КОНТАКТИРОВАНИИ | 1997 |
|
RU2130601C1 |
| Цифровой тахометр | 1983 |
|
SU1151888A1 |
| Устройство для сопряжения двух вычислитель-НыХ МАшиН | 1979 |
|
SU805296A1 |
| Устройство для определения направления магнитокристаллической текстуры ферромагнитных тел вращения | 1989 |
|
SU1659932A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2175120C2 |
| Устройство контроля прочности перемычки | 1990 |
|
SU1798089A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2078324C1 |
Изобретение может быть использовано для измерения зависимости пускового момента электродвигателя от положения ротора. Цель изобретения - повышение точности. Устройство, реализующее способ, содержит приводной двигатель 2, датчик 4 силы, измерительно-управляющую систему 6, включающую в себя ЭВМ 7, пусковое устройство 8, блок 9 управления, регистрирующий прибор 10, системную шину 11, блок 12 сопряжения, процессор 13, блок 14 запоминающего устройства и видеотерминал 15. Введение новых элементов и образование новых связей между элементами устройства no3BOjhieT ротор электродвигателя вращать с заданной скоростью с помощью внешнего привода и одновременно регистрировать угловое положение ротора и крутящего момента на нем. 2 ил. Э/гектрическал сеть /617 3 (Л со N3 00 О5 СО сд - 1
| Прибор для снятия внешних характеристик электрических шаговых двигателей | 1959 |
|
SU125614A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Мушкетов И | |||
| А | |||
| и др | |||
| Приборы для измерения вращающих моментов электродвигателей малой мощности.-Электротехника, 1975, № 8, с | |||
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
