Изобретение относится к испытанию конструкций или сооружений на вибрацию, а именно к электрогидравлическим испытательным стендам.
Цель изобретения - повншение точности управления.
Поставленная цель достигается тем, что устройство снабжено фазовращателем, вход которого соединен с выходом датчика обратной связи, а выход - с входом второго усилителя, третьим элементом сравнения, первый вход которого соединен с выходом второго усилителя, а выход - с первым входом первого усилителя, регулятором амплитуды, первый вход которого соединен с выходом первого элемента сравнения, а выход - с вторым входом первого усилителя и с вторым входом третьего элемента сравнения, выпрямителем, вход которого соединен с выходом второго усилителя, а выход - с вторым входом второго элемента сравнения, системой динамической корректировки, выполненной в виде последовательно соединенных дифференциатора, первого компаратора, первого триггера и ключа, выключенных между выходом блока задания режима испытаний и вторым входом, первого элемента сравнения, т второго источника опорного напряжения, выход которого соединен с вторьм входом первого компаратора, последовательно соединенных интегратора и второго компаратора, выход которого соединен с вторым входом первого триггера, а вход интегратора соединен с выходом третьего элемента сравнения, третьего источника опорного напряжения, выход которого соединен с вторым входом второго компаратора, параллельно соединенных третьего ком- , паратора и первого и второго регулируемого усилителей, первые входы которых соединены с выходом второго усилителя, а второй вход третьего компаратора соединен с выходом блока задания режима испытаний, второго триггера, первый внод которого соединен с выходом первого компаратора, а второй вход - с выходом третьего компаратора, селектора каналов, первый и второй входы которого соответственно соединены с выходами первого и второго регулируемых усилителей, третий вход - с выходом второго триггера, а выход - с вторым входом ключа.
5
0
5
0
5
0
5
0
5
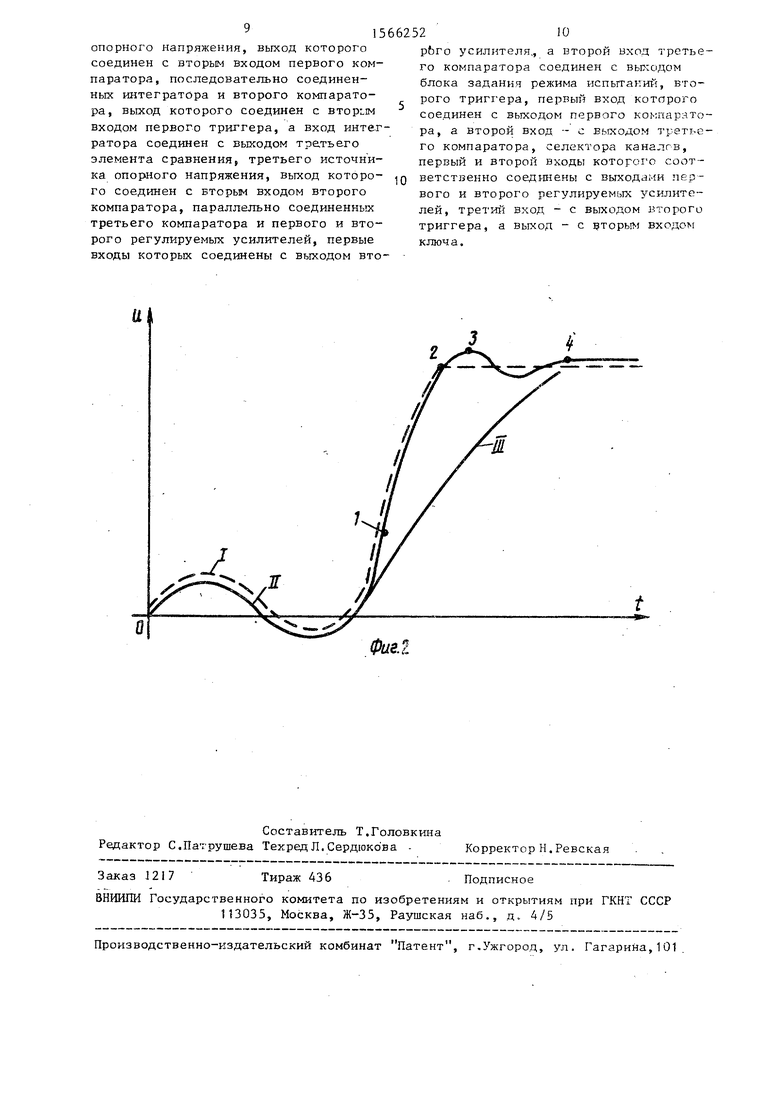
На фиг. 1 представлено устройство для управления электрогидравлическим вибратором; на фиг. 2 - кривые изменения сигнала задания (кривая I), обратной связи при включенной системе динамической корректировки (кривая II) и обратной связи при отсутствии динамической корректировки (кривая III).
Устройство содержит блок 1 задания режима испытаний, первый элемент 2 сравнения, первый усилитель 3, датчик 4 обратной связи, второй усилитель 5, второй элемент 6 сравнения, фазовращатель 7, третий элемент 8 сравнения, выпрямитель 9, регулятор 10 амплитуды и систему 11 динамической корректировки, содержащую дифференциатор 12, первый компаратор 13, первый триггер 14, ключ 15, второй триггер 16, селектор 17 каналов, интегратор 18, второй и третий компараторы 19 и 20, первый и второй регулируемые усилители 2J и 22.
Электрогидравлический вибратор показан в виде соединенных последовательно электрогидравлического преобразователя 23 и гидравлического исполнительного механизма 24.
Первый, второй и третий источники опорного напряжения на чертеже не показаны.
Устройство работает следующим образом.
Сигнал задания, имитирующий реальные режимы работы объекта, с выхода блока 1 задания режима испытаний поступает на первый вход первого элемента 2 сравнения, где сравнивается с сигналом, поступающим из системы I1 динамической корректировки. С выхода первого элемента 2 сравнения сигнал поступает на первый вход регулятора 10 амплитуды, поддерживающего амплитуду сигнала задания на заданном уровне в соответствии, с уровнем поступающего на его второй вход сигнала с выхода второго элемента 6 сравнения.
Откалиброванный по амплитуде сигнал поступает на второй вход третьего элемента 8 сравнения и на второй вход первого усилителя 3, который управляется поступающим с выхода третьего элемента 8 сравнения сигналом, полученным в результате сравнения сигнала задания и сигнала обратной связи.
С выхода первого усилителя 3 сигнал поступает на вход электрогидрав515
лического преобразователя 23, которым управляется гидравлическим исполнительным механизмом 24, на подвижной «асти которого установлен датчик 4 обрлтной связи. За счет реакции ж ты- туемого объекта (не показан) сигнал, снимаемый с 4 связи, сдвинут по фазе относительно задающего сигНапа. Сдвиг фаз определяется с помощью фазоанализатора (не показан) перед проведением испытаний и устанавливается на фазовращателга 7. Таким образом, сигнал с выхода фазовращателя 7, поступающий на вход второго усилителя 5, имеет фазу, одинаковую с фазой спгната задания, поступающего с блока 1 задания режима испытаний Сигнап с вьгхода вире-о усилихспя 5, отфгогьтрованный по час .оте и усилен- ныи по амплитуде, пен тупает на первый вход третьего элемента 3 сравнения, где сравнивается с сигналом задания с выхода регулятора 10 амплитуды.
В результате сравнения поступающих на первый и второй входы третьего элемента 8 сравнения сигналов на его выходе формируется сигнал, совпадающий по фазе с сигналом задания.
С выхода третьего блока 8 сраьне- ния сигнал поступает на первый / управляющий) вход первого усилителя 3 и на вход интегратора J8. Сигнал рассогласования выхода второго усилителя 5 после его выпрямления в выпрямителе 9 поступает на второй вход второго элемента 6 сравнения, где сравнивается с сигналом опорного напряжения, задающим амплитуду сигнала задания. Амплитуда сигнала задания ограничена техническими характеристиками используемого гидравлического исполнительного механизма 24, имеющего конечную величину перемещения подвижной части.
Это oiраничение устанавливается величиной опорного напряжения на первом входе второго элемента 6 сравнения .
Уст ройство позволяет устранить
вызванное инерционностью гидравлического исполнительного механизма 24 демпфирование за счет увеличения быстродействии при помощи системы I
динамической корректировки.
В установившемся режиме сигнал на ;ш4.фЈ-р1 нциа гора J2 ранен нутю, vJ.i - j разомкну: и Cr-инал на втором
JQ )$ 20
2
30 АС
О
35
40
5
входе первого элемент 2 гр рнения отгутст Ever,
Система II дин мическоч кот р ; тц- ровки ВКЛПЧЯРТСЯ только лрч возникновении определенно скорост, измен. тш. сигнала задания. Дтя on i еде пеин-т i ;- чения скорости испольчу -iся дифференциатор 12, Г J ВХОД KOTOpr о ГМ-Тут.-ц. 1
сигнал с 1 задания им. таний. При определенней ског с ги MJ- менения сигна:.л адлния (точка 1 на фиг.2) на выходе дифференциатора 2 возникает сигнал, not ту ак/чни па пер- Вп1й вход первого комг «рагира 13, пл второй вход которого поступает опорное напряжение, величина опорного i i- пряжения соответству- т минимал 1Ном значению скорости изменения сигнал задания, при котором включается система П динамической корректировки. При равенстве поступающих на РХОДЫ первого компаратора 13 гигналов на его выходе возник ie-т сиг пат, жлючак. щий первый и второй триттерр 14 и 16, управляющие сигчапы с яых Д,о - соответственно пс р -вочят ключ 1Ь во включенное г п-1 ояш:е и псяктю- чает первый вход селектопа 17 пана нов к ei о выходу.
Таким ог ра 3 - , .с с i ь: IOT ч по- ложительная обратная гиял. по следу ;- щей цепочке: вь хсд второго усил.тс-- ля 5 - второй регулируемы угилн е-гь 22, инвертирутощий пгступаем1Ч1 ча него сигнал - первый вход сепектора 17 к; - налов - ключ 15 - второй вход перр го элемента 2 сравнения. Величина коэффициента усиления вторе го регулируемого усилителя 2° определяется ри анализе амплитудно-фазовой харак ериг- тики (АФХ) объекта, cut чаемой перед проведением испытаний.
Присутствие положительной обратной свчзи позволяет злить демпфирование. Однако при достижении сигналом обратной связи амг штуды сигнала задания попожитеш н. я обрпн.я связь вносит дополни, ельнг 1 jirv, в систему управления гидраРчпчгс . гм HI- полнитсльным механизмом 4, а следовательно, возникает чео . имог г отключения положите гп но ч обратной
В системе 1 дин н-и еп й корректировки предусмо рено fl TKji-i pi iie -«гом обратной связи в момент юг . о1 рния амплитудой гипып, () и сил н:, по- crynawinvJT г с вмчо i H ч i упчнтс
5 на первый вход третьего компаратора 20 амплитуды сигнала задания (точка 2, фиг. 2), поступающего от блока 1 задания режима испытаний на второй, вход третьего компаратора 20.При этом сигнал с выхода третьего компаратора 20 поступает на второй вход второго триггера 16, подключающего у торой вход селектора каналов 17 к его выходу. Сигнал с выхода селектэра 17 через ключ 15 подается на второй вход первого элемента 2 сравнения (точка 3, фиг. 2). Он характеризуется как дополнительная отрицательная обратная связь, позволяющая сократить переходный процесс в системе управления за счет дополнительного демпфирования. Переходный процесс вызван перерегулированием за счет наличия положитёль- ной обратной связи и демпфирования системы. Данная отрицательная обратная связь образуется по цепочке: вход второго усилителя 5 - первый регулируемый усилитель 21 - селектор 17 ка- налов - ключ 15 - второй вход первого элемента 2 сравнения. Величина коэффициента усиления первого регулируемого усилителя 21 также выбирается предварительно на основе анализа объекта.
Однако постоянное присутствие обратной отрицательной связи вносит погрешность в работу устройства. Поэтому возникает необходимость ее от- ключения после окончания переходного процесса. Отключение ее происходит следующим образом. На вход интегратора 18 поступает сигнал рассогласования между сигналами задания и обрат- ной связи. Время интегрирования интегратора 18 выбрано больше времени переходного процесса регулирования. Поэтому напряжение на выходе интегратора 1, сравнимое с напряжением, подаваемым в качестве опорного на второй вход второго компаратора 19, поступит после окончания переходного процесса (точка 4, фиг. 2).
При равенстве этих сигналов на выходе второго компаратора 19 возникает сигнал, поступающий на вход первого триггера 14, сигнал с выхода которого выключает ключ 15, отключая та- ким образом (точка 4, фиг. 2) дополнительную отрицательную обратную связь от второго входа первого элемента 2 сравнения.
После этого система 11 динамической корректировки находится в состоянии ожидания следующего возмущения, после которого в переходном режиме сначала осуществляется компенсация демпфирования, а затем вводится дополнительное демпфирование.
Положительный эффект от изобретения достигается от повышения эффективности проведения испытаний путем улучшения динамических характеристик устройства и повышения точности обработки сигнала задания за счет устранения демпфирования-, таким образом повышается точность управления.
Формула изобретения
Устройство для управления электрогидравлическим вибратором, содержащее соединенные последовательно блок задания режима испытаний и первый элемент сравнения, первый усилитель, выход которого предназначен для подключения к входу электрогидравлического вибратора, датчик обратной связи, вход которого предназначен для подключения к выходу электрогидравлического вибратора, второй усилитель, первый источник опорного напряжения, второй элемент сравнения, первый вход которого соединен с выходом первого источника опорного напряжения, отличающееся тем, что, с целью повышения точности управления, оно снабжено фазовращателем, вход которого соединен с выходом датчика обратной связи, а выход - с входом второго усилителя, третьим элементом сравнения, первый вход которого соединен с выходом второго усилителя, а выход - с первым входом первого усилителя, регулятором амплитуды, первый вход которого соединен с выходом первого элемента сравнения, а выход - с вторым входом первого усилителя и с вторым входом третьего элемента сравнения, выпрямителем, вход которого соединен с выходом второго усилителя, а выход - с вторым входом второго элемента сравнения, системой динамической корректировки, выполненной в виде последовательно соединенных дифференциатора, первого компаратора, первого триггера и ключа, включенных между выходом блока задания режима испытаний и вторым входом первого элемента сравнения, второго источника
у156
опорного напряжения, выход которого соединен с вторым входом первого компаратора, последовательно соединенных интегратора и второго компаратора, выход которого соединен с втором входом первого триггера, а вход интегратора соединен с выходом третьего элемента сравнения, третьего источника опорного напряжения, выход которо- го соединен с вторым входом второго компаратора, параллельно соединенных третьего компаратора и первого и второго регулируемых усилителей, первые входы которых соединены с выходом вто210
рбго усилителя., а второй вход третьего компаратора соединен с выводом блока задания режима испытаний, второго триггера, первый вход которого соединен с выходом первого кгжнаг тира, а второй вход - о вь ходим т; or -i - го компаратора, селектора канальи, первый и второй входы котогг 1 о солт - ветстленно соединены с выходаии uf - вого и второго pei улируемьгх усилителей, третий вход - с выходом второго триггера, а выход - с вторым входом ключа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления приводом балансировочного стенда | 1982 |
|
SU1118962A2 |
| УСТРОЙСТВО ДЛЯ ВОЗБУЖДЕНИЯ УДАРНЫХ ИМПУЛЬСОВ | 1993 |
|
RU2019795C1 |
| Способ управления горной машиной | 1990 |
|
SU1781426A1 |
| Устройство управления приводом балансировочного стенда | 1982 |
|
SU1019396A1 |
| Устройство для управления положением магнитной головки относительно строчки записи | 1986 |
|
SU1327176A1 |
| Генератор случайного напряжения | 1984 |
|
SU1241238A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ВРАЩАЮЩИХСЯ ДЕТАЛЕЙ НА РАЗРЫВ | 1989 |
|
RU2029276C1 |
| Инфузионный насос | 1985 |
|
SU1279635A1 |
| ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ В ЧАСТОТУ | 1989 |
|
RU2024195C1 |
| Вибростенд | 1979 |
|
SU877483A1 |
Изобретение относится к испытанию конструкций или сооружений на вибрацию, а именно к электрогидравлическим испытательным стендам. Цель изобретения - повышение точности управления электрогидравлическим вибратором путем улучшения динамических характеристик вибратора и повышения точности отработки сигнала задания за счет устранения демпфирования. Устройство содержит последовательно соединенные блок 1 задания режима испытания и элемент 2 сравнения, усилитель 3, предназначенный для подключения ко входу электрогидравлического вибратора, датчик 4 обратной связи, предназначенный для подключения к выходу вибратора, усилитель 5 и элемент 6 сравнения. В устройство введены фазовращатель 7, выпрямитель 9, элемент 8 сравнения, регулятор 10 амплитуды сигнала задания, ограниченной техническими характеристиками используемого электрогидравлического вибратора, и система 11 динамической корректировки, устраняющая демпфирование при управлении электрогидравлическим вибратором. 2 ил.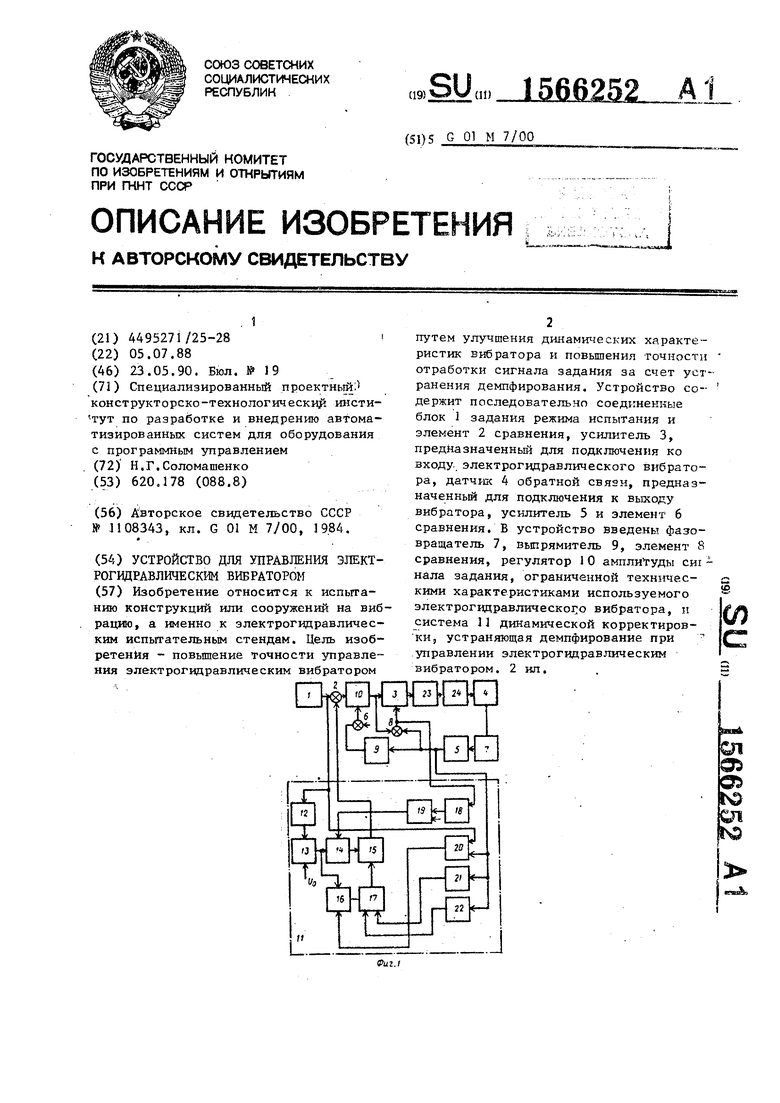
| Устройство для управления электрогидравлическим вибратором | 1982 |
|
SU1108343A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
