Изобретение относится к виброиспытаниям и может найти применение f в качестве задатчиков электроприводов постоянного тока балансировочных стендов.
Известно устройство управления 5 1фиводом балансировочного стенда, содер 1;аи;ес последовательно соединенные датчик вибраций, усилитель, инте-. гратор, преобразователь частота-аналог, преобразователь аналог-фаза, ам- 10 .плитудный .детектор, блок сравнения, j-.егулятор амплитуды и усилитель мощ(ости, выход интегратора подключен к второму входу преобразователя налог-фаза, выход которого соединен с 5 вторыг входом регулятора амплитуды, выход про1раммного задатчика соединен с вторь; 1ВХОДОМ блока сравнеЕ ия l.
Известно та.кже устройство управления гц;)МБо,пом балансировочного стен- д да, оодержагнее последовательно соединенные датчик перемещений, первый усилитель, ()i-.fjbTp, инхронный детектор, фильтр нижних частот, сумматор, усилитель мощности и двигатель, вал 25 которого соединен с управляющим входом задз;атчика амплитуды вибраций, вход которого подключен к выходу генератора рабочей частоты, а выход - к входу второго усилителя, генератор
. 30 несущей частоты, выходом подключен ный к входу датчика перемещений и входу выпрямителя, выход которого .непосредственно и через задающий nor: тенциометр подключен к второму и третьему входам суглматрра ,2. ,
Недостатком лзвестных устройств являются их низкие динамические характеристики, что снижает производительность балансировочного стен- 40 да. .
.Наиболее близким к предлагаемому по технической суи,ности является устройство управления приве дом балансировочного стен.,а содержащее 45 последователр но соединенный задатчик первый резистор, операционный усилитель и интегратор неинвертирующим выходом через второй резистор подключенный к входу операционного усили- со Теля, выходом через регулируемый ограничитель подключенный к своему входу, прямой выход интегратора и выхсэд .операционного усилителя подключе ны к соответствующим входам первого и второго компараторов, выходы которых соединены с входами ключевого элемента, выходом подключенного к правляющему входу регулируемого . ограничителя 31.
Недостатками известного устрой- 0 ства являются его низкие динамические характеристики: точность и быстроействи.е, которые приводят к снижению роизводительности балансировочного тенда.65
Цель изобретения - улучшени.е динамических характеристик устройства.
Поставленная цель достигается тем что в устройстве управления приводом балансировочного стенда, содержащем первый компаратор, последовательно соединенные 3;адатчик, первый резистор, операционный ус.илитель и интегратор, неинвертирующим выходом через второй резистор подключенный к входу операционного усилителя, и второй компара-трр, .выходом подключенный, к управляющему входу первого ключа, выходом подключенного к управляющему входу регулируемого ограничителя, первым выводом соединенного с выходом операционного усилителя, дополнительно установлены датчик амплитуды вибраций, второй ключ и ус.илителЬ, первым входом подключенный к .выходу датчика амплитуды вибраций и. к первым входам первого и второго компараторов, а выходом - к сигнальному входу первого ключа, второй, третий и четвертый выходы задатчика соединены с вторыми входами соответственно усилителя, певого и второго компаратора, выход певого компаратора соед1инен с управляющим входом второго ключа, соединеного первым выводом с вторым выводом регулируемого ограничителя, а вторым выводом - с входом операционного усилителя. ..
На чертеже представлена принципиальная схема предлагаемого устройств
Устройство содержит первый и второй компараторы 1 и 2, операционный усилитель 3, усилитель 4, регулируемЕ11й ограничитель 5, интегратор б, второй и первыйключи 7 и 8, задатчик 9, датчик 10 амплитуды«вибраций, первый, второй и третий резисторы 11-13, операционный усилитель 14, конденсатор 15.
Устройство работает следующим образом, . .
Сигнал задания частоты вращения привода с первого выхода задатчика 9 поступает на инвертирующий вход операционного усилителя 3 и вводит его в режим ограничения.
Выходной сигнал операционного усилителя 3 интегрируется интегратором б с парафазными выходами. Интегратор б и Операционный усилитель 3 охвачены отрицательной обратной связью с коэффициентом передачи, равным единице. В результате выходной сигнал интегратора 6. .после отработки выход ного сигнала операционного усилителя i3, устанавливается равньш сигналу задания первого.выхода задатчика 9.
Пока выходной сигнал интегратора б не достиг уровня сигнала задания с первого выхода яадатчика 9 обратна связь операционного усилителя 3 блокрована и он имеет на своем выходе сигнал, определяемый уставкой регулируемого ограничителя 5, включённого в цепь обратной связи операционного усилителя 3 через замкнутый ключ 7.
Постоянные сигналы с.фиксирован- ными уровнями и, и2 УЗ качестве пороговых сигналов с четвертого, третьего и второго выходов задатчика 9 поступают на вторые входы второго и первого компараторов 2Д и усилителя 4. Уровни и.-, Uj, Цэ пороговых сигналов устанавливаются в зависимости от выбора 111акси114ального и минимального значений амплитуды вибраций испытуемого объекта при соблюде НИИ следующих условий У U-, Uj . i-fle Vm max.- граничные значения амплитуды вибраций ис- следуемого объекта.
Сигнал, пройорциональный амплитуде вибрации исследуемого объекта, в аналоговой форме поступает с выхода датчика 10, одновременно на первый вход Усилителя 4, где сравнивается .с пороговым сигналом Оз г поступающим с четвертого выхода задатчика на его второй вход, и на первые входы компаратора 1 и 2 где сравнивается с пороговыми сигналами U 2, U | поступающими с третьего и второго выходов задатчика. 9 на вторые входы.
При отсутствии сигналов на выходах компараторов 1 и 2 второй ключ 7- замкнут, а первый ключ В разомкнут. . : - :.
Сигнал задания частоты вращения привода с первого выхода задатчика 9 в переходном режиме переводит операционный усилитель 3- в режим ограничения с положительной или отрицательной величиной выходного сигнала в зависимоети от направления вращения привода или режима работы раз гон или тррможени е ). Выходной Сигнал операцйонного усилителя 3 приводит к нарастанию сиг-нала на выходе интегратора 6 и привод разгоняется. Полярность выходного сигнала ;интегратора б противоположна полярности его входного сигнала, поскольку он снимается с инвертирующего выхода.
При работе привода балансировочйого стенда вне области резонансных частот, характеризующей малым уровнем иg(t) амплитуд вибраций исследуемого объекта с Датчика 10 амплитуда вибраций, сЬответствующим условию Ug(t) и , где Ug(t) выходной Сигнал датчика 10 амплитуды вибрации, сигнал на выходе компаратора 2 отсутствует. В это время первый :ключ 8 разомкнут и сигнал с выхода усилителя 4 на управляющий вход регулируемого о;граничителя 5 не проходит. Сигнал на/выходе интегратора 6 с парафазными выходом возрастает по линейному закону в соответствии с выражением и...,
, ВЫк ОЗ. т I
где оу- сигнёш на выходе оперсГционного усилителя 3, определяемый первоначальной уставкой регулируемого
Ограничителя 5 , где к ко ффициент передачи усилителя 4; Т постоянная времени интегрирования интегратора 6.
Время интегрирования t, а следовательно, темп разгона прнводабалансиррв очного стенда может егулиро ваться изменением величины UQ
1При подходе привода балансировоч-. ного стенда к рабочим частотам вблизи резонансной зоны исследуемого объекта как только амплитуда вибраций объекта превысит порог U, срабатывает компа ратор 2. выходной Сигнал которого замыкает первый ключ 8, и на вход регулируемого ограничителя 5 с Вы хода операционного усилителя 4 поступает сигнал, пропорциональный разности l).j- U0(t), ограничивающий выходной сигнал операционного усилителя 3 i Темп нарастания выходного сигнала интегратора 6 при этом снижается в соответствии с выражением
%ых з-ч{Шг :
вызывая замедление разгона привода При работе привода на резонанс;яых ча стртах, сопровождакяцейся ловьшёанцм уровнем амплитуды вибраций, превьшающим порог и2I опредвлякадий допустимый уровень безопасных вибраций, срабатывает второй компаратор 2 и воз-г действует на ключ 7, размыкающий цепь обратной связи операционного усилителя 3, который переходит в реж{ш насыщёния.
Темп нарастания выходного сигнала интегратора б при этом значительно уве.личивается в соответствии с выражение
i
. Y где UH - сигнал насыщения
на выходе усилителя 3 (Мн Цад) вызывая ускорение разгона привода балам сировочнЬго стенда по линейному закону .
Как только выходной сигнал интегратора б достигнет УРОВНЯ сигнала задания с первого выхода задатчика 9, сигнал на выходе операционного усилителя 3 резко падает практически до нуля, и процесс интегрирования прекращается. Привод балансйрЬвочного стенда вращается с постоянной частотой в соответствии с сигналом задания.
При исчезновении сигнала заданнЯ первого выхода задатчика 9 или снижении его уровня балансировочного стенда переходит в режим торможения. При этом выходной сигнал операционного усилителя 3 меняет под действи 4 сигнала обратной связи свой знак. Это приводит к снижению уровня вы510193964
ходного сигнала интегратора б при . Кромегтого, применение предлаего неизменной полярности на всегаемого устройства управления баланвремя торможения.сировочнЕлм стендом позволяет увели- Предлагаемое, устройство позволяетда балансировочного стенда и обесперезко увеличивать выходной сигнал в чить прохождение нерезонансных облатех случаях, когда текущая частотастей виброхарактеристик исследуемых
вибраций находится в областях, зна-объектов с максимально возможной
чительно удаленных от резонансныхскоростью. За счет этого общее время
частот исследуемого объекта, и завиброиспытаний объекта снижается в
счет этого улучглить динами- 103,5-4 раза и примерно во столько же
ческие характеристики устройст-раз увеличивается производительность
ва.балансировочного стенда.
читБ темп разгона и торможения приво
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления приводом балансировочного стенда | 1982 |
|
SU1118962A2 |
| Устройство для управления вращением шпинделя балансировочного станка | 1988 |
|
SU1610339A1 |
| Регулятор | 1983 |
|
SU1115016A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ВРАЩАЮЩИХСЯ ДЕТАЛЕЙ НА РАЗРЫВ | 1989 |
|
RU2029276C1 |
| Частотно-регулируемый асинхронный электропривод для испытательного стенда двигателей | 1984 |
|
SU1203682A1 |
| Задатчик скорости | 1984 |
|
SU1234809A1 |
| Стенд для испытания вращающихся деталей на разрыв | 1990 |
|
SU1827569A1 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
| Устройство регулирования скорости электродвигателя | 1983 |
|
SU1125600A1 |
УСТРОЙСТВО.УПРАЕЛЕНИЯ ПРИВОДОМ; ВАЛАНСИРОВОЧНОГО СТЕНДА, содержащее первый компаратор, последова- тельно соединенные задатчик, первый резистор, операционный усилитель и интегратор нёинвертирующим выходом через второй резистор подключенный. к входу операционного усилителя, и второй колтар ор, выходом. подключенный к управляющему входу первого ключа, выходом подключенного к управляющему входу регулируемого ограничителя, первым выводом соединенного с выходом операционного усилителя, от л и ч а ю п; е е:С я . тем, что, с целью улучшения динамических характеристик устройства, в нем установлены датчик амплитуды вибраций, второй ключ и усилитель, П1ервым входом подключенный к выходу датчика амплитуды вибраций и к первым вхойам первого и второго кОмпараторов, а 1выходом к сигнальному вхо: ду первого ключа, второй, третий и. четвертьш выходы задатчика соединены с вторыми входами соответственнЪ .усилителя, первого и второго Компарато-J ра, выход первого компаратора соедй,сл нен с управляющим входом второго «люЧа/ соединенного первым выводом с ; втьрым выводом регулируеиого ограньчителя, а вторым выводом - с вхо дом операционного усилителя. :О :о 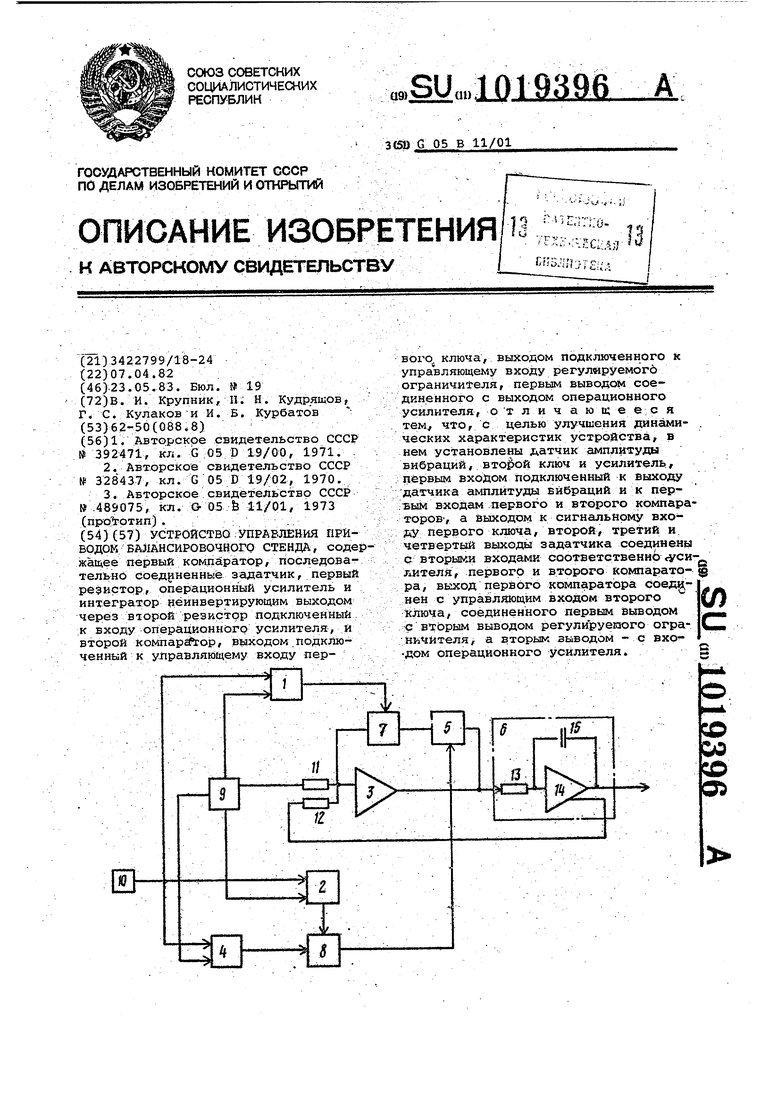
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОДИНАМИЧЕСКИМ ВИБРОСТЕНДОМ | 0 |
|
SU392471A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| : | |||
