3
Изобретение относится к машиностроению, в частности-к механизмам, преобразующим постоянное вращение входного звена в периодическое вращение выходного звена с точным и регулируемым выстоем и может быть использовано в машинах для периодической смены позиций изделия.
Цель изобретения - расширение кинематических возможностей механизма за счет регулирования по величине угла поворота кривошипа, соответствующего участку выстоя выходного звена.
него стояния а&, охватывающий угол ближнего стояния у, равный 1/6 и 180°i 2) профиль удаления &ci 3) профиль дальнего стояния cd; 4) профиль возвращения da. Профили &с , cd и da образуют рабочий профиль кулачка 5cda, который охватывает угол р ра
бочего профиля, равный lfp 180 . Углы и (располагаются по обе стороны от оси , Подвижный кулачок 17 имеет следующие профили: 1) профиль ближнего стояния а (У, охватывающий угол ближнего стояния (/ 6, равный
| название | год | авторы | номер документа |
|---|---|---|---|
| Рычажно-зубчатый механизм | 1984 |
|
SU1188415A1 |
| Кулачково-зубчато-рычажный механизм | 1982 |
|
SU1046556A1 |
| Привод батана ткацкого станка | 1986 |
|
SU1381210A1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ КОЛЕБАНИЙ ВЫХОДНОГО ЗВЕНА КУЛАЧКОВО-ЗУБЧАТО-РЫЧАЖНОГО МЕХАНИЗМА | 1993 |
|
RU2066858C1 |
| РЫЧАЖНО-КУЛАЧКОВЫЙ МЕХАНИЗМ | 1991 |
|
RU2011071C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2346804C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179505C1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЛЕНТОЧНОГО МАТЕРИАЛА | 1994 |
|
RU2081798C1 |
| ПРИВОД РЕМИЗОПОДЪЕМНОЙ КАРЕТКИ ТКАЦКОГО СТАНКА | 1990 |
|
RU2009282C1 |
| КУЛАЧКОВО-ЗУБЧАТО-РЫЧАЖНЫЙ МЕХАНИЗМ ДЛЯ ВОСПРОИЗВЕДЕНИЯ ПЕРИОДИЧЕСКОГО ПОВОРОТА | 1992 |
|
RU2057977C1 |
Изобретение относится к кулачково-зубчато-рычажным механизмам. Цель изобретения - расширение кинематических возможностей механизмов. Механизм имеет стойку и установленные на ней кривошип 1 и коромысло 3, связанные шатуном 9 и образующие параллелограмм АВСД, в котором шатун и коромысло несут в своих шарнирах зубчатые колеса. Кривошип образует одним своим концом поступательную пару с ползуном 2, имеющим вращательную пару со стойкой. Механизм снабжен двумя одинаковыми кулачками 17 и 18, соосными с ползуном 2, один из которых неподвижен, а другой имеет возможность поворачиваться так, чтобы оба кулачка образовывали суммарный кулачок переменного профиля, которого касается подпружиненный ролик 16, расположенный шарнирно на другой конце толкателя-кривошипа параллелограмма АВСД. При этом соприкасание происходит внутренним образом, если кулачки имеют одинаковые углы рабочего профиля и профиля ближнего стояния, и внешним образом, если кулачки имеют одинаковые углы рабочего профиля и профиля дальнего стояния, а ролик 16 кривошипа располагается в шарнире, обазованном концом кривошипа с одним из двух шатунов 7, связывающих шарнирно кривошип с коромыслом 3, которые, кроме того, имеют жестко с ними соединенные и им соосные зубчатые колеса, связанные друг с другом одним, шарнирно соединенным со стойкой, паразитным колесом 5 так, что образовавшийся последовательный ряд зубчатых колес имеет передаточное отношение, равное единице. 1 ил.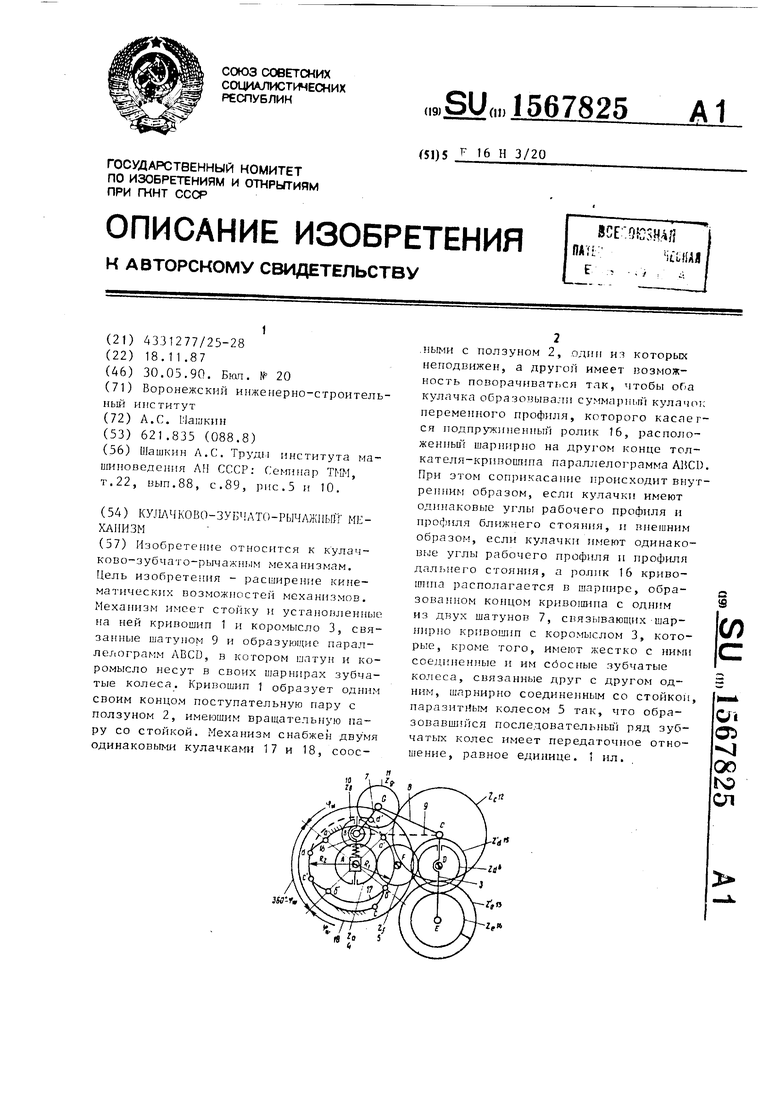
На чертеже изображена кинематичес-15 и располагающийся по одну
30
35
кая схема кулачково-зубчато-рычажного механизма.
Механизм содержит стойку (условно не показана), кривошип 1, образующий поступательную пару с вращающимся от- JQ носительно стойки в шарнире А ползуном
2и коромыслом 3. Кривошип 1 и коромысло 3, образующие шарнир D со стойкой, связаны зубчатыми колесами 4, 5
и 6 с числами зубьев Z, Zf и Z, ко-25 торые образуют шарниры A, F и D со стойкой, при этом колеса 4 и 6 жестко соединены с кривошипом 1 и коромыслом
3соответственно и связаны условием . Кривошип 1 связан шарниром В с шатуном 7, который в свою очередь образует шарнир G с дополнительным шатуном 8. Длина ВС условного шатуна 9 параллелограмма ABCD является переменной и образуется как сторона треугольника BGC, в котором две другие стороны образуются длинами основного
и дополнительного шатунов 7 и 8. Шатун 8 образует шарнир С с коромыслом 3. Шатуны 7 и 8 несут зубчатые колеса 10, 11 и 12 наружного зацепления с числом зубьев Z, Z л и Zc. Колесо 12 образует наружное зацепление с колесом 13 (Z e) , жестко связанным с колесом 14 (Zc). Блок колес 13, 14 соединен с шарниром Е с коромыслом 3.
В шарнире расположено выходное колесо 15 (zjj), образующее наружное зацепление с колесом 14 (ZЈ). Кривошип 1 является толкателем кулачкового механизма и несет подпружиненный ролик 16, который входит в соприкасание с переменным профилем, образующимся с помощью двух специальных кулачков 17 и 18, одинакового профиля, один из которых неподвижен, а второй связан с первым с возможностью поворота и фиксации. Неподвижный кулачок 18 имеет следующие профили: 1) профиль блнж-
40
45
50
55
сторону от оси а Аб ; 2) профиль у ления & с i 3) профиль дальнего яния c d , 4) профиль возвращения d a . Профили fe с, c d и d a об зуют рабочий профиль кулачка 6 с который охватывает угол 4 ррабоче профиля, равный , и распол гается по другую сторону от оси а Таким образом, кулачки 18 и 17 им одинаковые профили, которые вырез ются внутренним образом в шайбе, о ченной по окружности, когда ролик располагается и описывает профиль кулачка внутренним обратом.
15 приходит в д если параллело что происходит
Работа механизма осуществляется следующим образом.
Выходное колесо жение о том случае, грамм ABCD нарушен, когда на определенном интервале вр мени движения кривошипа 1 изменяет его длина и длина шатуна 9. Это де лается с помощью кулачкового механ ма, но так, ч го одновременно угол стоя может регулироваться по его в личине. В начале регулирования угл выстоя Lf ьу-чачки 17 и 18 устанавл ваются в исходную позицию a(jcd. В случае оба профиля дают профиль су в котором угол Lf
Если перемеща
по часовой стрелке кулачок 17, то будет своим профилем ближнего стоя увеличивать профиль ближнего стоян кулачка 18 и уменьшать его профил дальнего стояния. Такое положение казано на чертеже. Здесь кулачок
имеет профиль ближнего стояния
/ 1 1 профиль дальнего стояния с- с dd a
При таком распотожении профилей ку лачков 17 и 18, образующих новый с марный профиль ьулг;ка, профиль бл него стояния суммарна го ку 1ачка с
марного кулачка и 180
и располагающийся по одну
сторону от оси а Аб ; 2) профиль удаления & с i 3) профиль дальнего стояния c d , 4) профиль возвращения d a . Профили fe с, c d и d a образуют рабочий профиль кулачка 6 с d a , который охватывает угол 4 ррабочего профиля, равный , и располагается по другую сторону от оси а Аб . Таким образом, кулачки 18 и 17 имеют одинаковые профили, которые вырезаются внутренним образом в шайбе, очерченной по окружности, когда ролик 16 располагается и описывает профиль кулачка внутренним обратом.
0
5
0
5
0
5
15 приходит в дви- если параллело- что происходит,
Работа механизма осуществляется следующим образом.
Выходное колесо жение о том случае, грамм ABCD нарушен, когда на определенном интервале времени движения кривошипа 1 изменяется его длина и длина шатуна 9. Это делается с помощью кулачкового механизма, но так, ч го одновременно угол выстоя может регулироваться по его величине. В начале регулирования угла выстоя Lf ьу-чачки 17 и 18 устанавливаются в исходную позицию a(jcd. В этом случае оба профиля дают профиль сум- в котором угол Lfa
Если перемещать
по часовой стрелке кулачок 17, то он будет своим профилем ближнего стояния увеличивать профиль ближнего стояния кулачка 18 и уменьшать его профиль дальнего стояния. Такое положение показано на чертеже. Здесь кулачок 17
имеет профиль ближнего стояния ,
/ 1 1 профиль дальнего стояния с- с dd a.
При таком распотожении профилей кулачков 17 и 18, образующих новый суммарный профиль ьулг;ка, профиль ближнего стояния суммарна го ку 1ачка с рамарного кулачка и 180
.диусом R, получается как аа 66 , а профиль дальнего стояния с радиусом RJ получается как 6 с da. На чертеже показано, что параллелограмм ABCD сохраняется, когда ролик 16 выставлен внутренним образом по окружности радиуса R. Это первый случай выставления ролика. Кривошип поворачивается на угол выстоя cfw, когда ролик 16 движется по профилю аа бб . В этом случае колесо 15 (Z) осуществляет точный выстой. Теоретически угол t/, может быть доведен до 360°, когда точка 6 совпадает с точкой а. Когда ролик 16 идет по профилю 6 c da, то длины кривошипа 1 и шатуна 9 увеличиваются, параллелограмм ломается, и колесо 15 (Zj) приходит в движение на участке 360° - Lpw поворота кривошипа 1. Поскольку длина шатуна 9 переменна, то она образуется с помощью длин основного и дополнительного шатунов 7 и 8. В рассматриваемом случае угол выстоя 1 | может регулироваться в пределах от до и 360°. Если ролик 16 выставляется по профилю кулачка снаружи, то кулачки 17 и 18 делаются сплошными, а не в виде двух шайб, в которых вырезаются профили двух кулачков. Соответственно и параллелограмм имеет такие длины кривошипа I и коромысла 3, при которых возможно наружное касание суммарного кулачка роликом 16. При этом сохраняются те же профили кулачков 17 и 18 и все обозначения, показанные на чертеже для кулачковых шайб с внутренним профилем кулачка. Таким образом, если ролик выставлен с наружным касанием профиля по радиусу К( , то угол и регулирование осув пределах В
Ц уменьшается,
теоретически ло (. В четвертом слу W
ществляется от .,. чае ролик 16 выставляется по профилю дальнего стояния с радиусом R снаружи сплошного кулачка. Угол выстоя может регулироваться теоретически пределах :.т if 180 до
.
в Во
всех случаях длина ролика 16 должна перекрывать обе толщины кулачков 17 и 18. Поскольку привошип 1 и коромысло 3 должны вращаться в параллелограмме ABCD в одну сторону и с одина1567Я25
10
15
20
ковой угловой скоростью, то они связаны друг с друг ом колесами 4-6. Для того, чтобы на работу механизма параллелограмма не оказывала влияния точность его изготовления, что является слабым местом любого параллелограмма, чтобы не нарушать зацепления колес 10, 11 и 12, чтобы компенсировать влияние мертвого хода зубчатой передачи и для того, чтобы одновременно ролик 16 мог переходить с профиля ближнего стояния на профиль дальнего стояния, и наоборот, длина шатуна 9 является переменной и может изменяться с. помощью шатунов 7 и 8 в треугольнике BGC.
Формула изобретения
Кулачково-зубчато-рычажный механизм, содержащий зубчато-рычажное центроидное устройство, имеющее стойку с установленными на ней кривошипом, образующим одним своим концом 25 поступательную пару с ползуном, и коромыслом, связанными шатуном и образующими параллелограмм, на шатуне и коромысле шарнирно установлены зубчатые колеса, образующие кинематический ряд, отличающийся тем, что, с целью расширения кинематических возможностей за счет регулирования по величине угла поворота кривошипа, соответствующего участку выстоя выходного звена, механизм снабжен дополнительным шатуном, двумя кулачками одинакового профиля, один из которых неподвижен, а второй связан с первым с возможностью поворота и фиксации, подпружиненным роликом, шарнирно закрепленным на одном из концов кривошипа для взаимодействия с кулачками, закрепленными на концах кривошипа и коромысла соосно с шарнирами зубчатыми колесами с одинаковым числом зубьев и связывающим их между собой зубчатым колесом, шарнирно соединенным СО стойкой, второй конец кривошипа шарнирно связан с ползуном, между последним и стойкой образована вращательная пара, кривошип, дополнительный и основной шатуны последовательно шарнирно связаны с коромыслом.
30
35
40
45
50
| (Пашкин Л.С | |||
| Труди института машиноведения ЛИ СССР: Семинар ТММ, т.22, вып.88, с.89, рис.5 и 10. |
