(21)4196582/24-28
(22)20,02,87
(46) 30.05,90. Бюл. № 20. (72) В.И.Урьяш, 3,А,Слив, М.Е.Лазарев, К.Х.Клямкин и Я.Н.Берштам
(53)531.717 (088,8)
(56)Авторское свидетельство СССР 796655, кл, G 01 В 11/00, 1983.
(54)УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ОБЪЕКТА
(57)Изобретение относится к контрольно-измерительной технике, Целью изобретения является упрощение конструкции за счет выполнения модулятора в виде вращающегося полого щелевого растра. Модулятор 9 приводят во вращение. Автоколлиматоры 5 и 6 формируют
параллельные световые потоки, несущие изображение световой марки, и направляют их в сторону зеркал 7 и 8 через прорези II и 12 в цилиндрической поверхности модулятора, Вращение модулятора приводит к изменению интенсивности потока излучения, падающего на автоколлиматоры 5 и 6,и появлению импульсных сигналов на их выходах. Наличие прорези 12 приводит к появлению на выходах автоколлиматоров 5 и 6 маркерных сигналов, Блок 13 обработки информации непрерывно измеряет временной интервал между маркерными импульсами посредством подсчета -и усреднения временных интервалов между импульсными сигналами, поступающими от автоколлиматоров, 1 ил.
ё (Л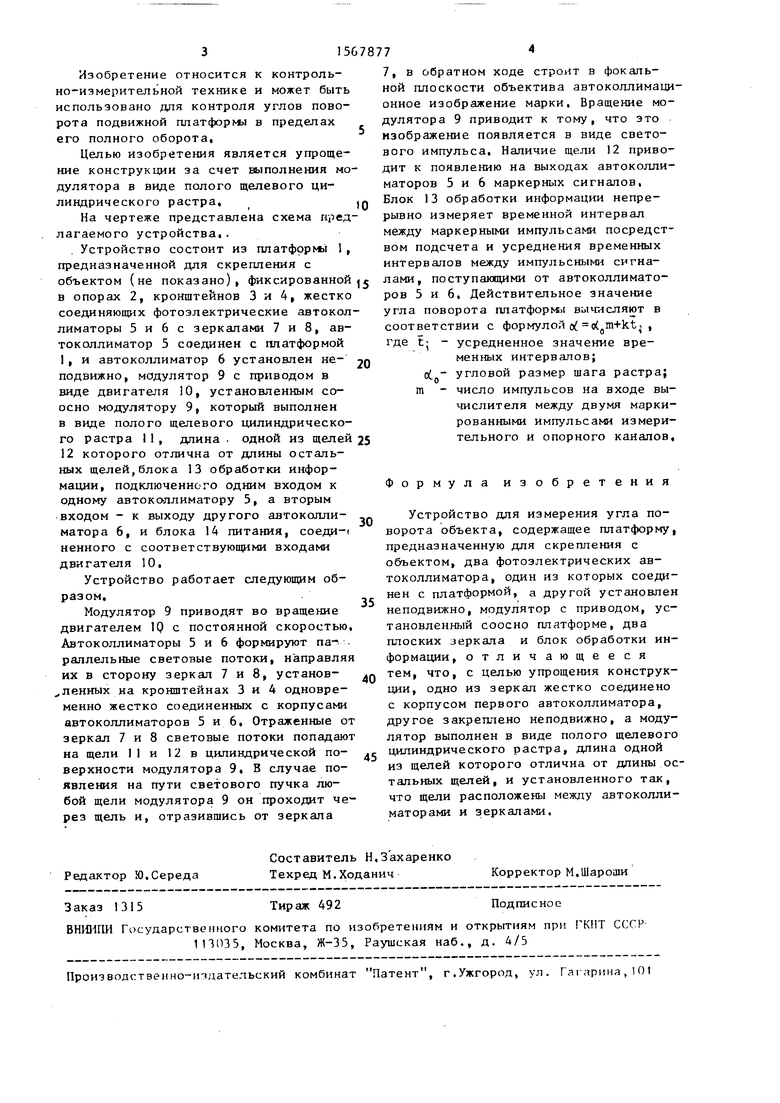
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля угла пово-POTA плАТфОРМы | 1979 |
|
SU796655A1 |
| Устройство для контроля угла поворота платформы | 1978 |
|
SU789680A1 |
| Автоколлимационное фотоэлектрическое устройство | 1980 |
|
SU968614A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ИЗОБРАЖЕНИЯ МАРКИ В ЦИФРОВЫХ АВТОКОЛЛИМАТОРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2773278C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ ПЛОСКИХ УГЛОВ | 2007 |
|
RU2353960C1 |
| Устройство для измерения углов призматических мер | 1986 |
|
SU1442825A1 |
| Фотоэлектрический автоколлиматор | 1980 |
|
SU953458A1 |
| Способ измерения показателя преломления оптического стекла | 1987 |
|
SU1511647A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2009 |
|
RU2408840C1 |
| АВТОКОЛЛИМАТОР | 2021 |
|
RU2769305C1 |
Изобретение относится к контрольно-измерительной технике. Целью изобретения является упрощение конструкции за счет выполнения модулятора в виде вращающегося полого щелевого растра. Модулятор 9 приводят во вращение. Автоколлиматоры 5 и 6 формируют параллельные световые потоки, несущие изобретение световой марки, и направляют их в сторону зеркал 7 и 8 через прорези 11 и 12 в цилиндрической поверхности модулятора. Вращение модулятора приводит к изменению интенсивности потока излучения, падающего на автоколлиматоры 5 и 6, и появлению импульсных сигналов на их выходах. Наличие прорези 12 приводит к появлению на выходах автоколлиматоров 5 и 6 маркерных сигналов. Блок 13 обработки информации непрерывно измеряет временной интервал между маркерными импульсами посредством подсчета и усреднения временных интервалов между импульсными сигналами, поступающими от автоколлиматоров. 1 ил.
I;L
Изобретение относится к контрольно-измерительной технике и может быть использовано для контроля углов поворота подвижной платформы в пределах его полного оборота.
Целью изобретения является упрощение конструкции за счет выполнения модулятора в виде полого щелевого цилиндрического растра,,Q
На чертеже представлена схема предлагаемого устройства,.
Устройство состоит из платформы 1, предназначенной для скрепления с
1567877
7, в обратном ходе строит в фокальной плоскости объектива автоколлимационное изображение марки, Вращение модулятора 9 приводит к тому, что это изображение появляется в виде светового импульса, Наличие щели 12 приводит к появлению на выходах автоколлиматоров 5 и 6 маркерных сигналов, Блок 13 обработки информации непрерывно измеряет временной интервал между маркерными импульсами посредством подсчета и усреднения временных интервалов между импульсными сигнаобъектом (не показано), фиксированнойjс лами, поступающими от автоколлимато20
30
в опорах 2, кронштейнов 3 и 4, жестко соединяющих фотоэлектрические автоколлиматоры 5 и 6 с зеркалами 7 и 8, ав- токоллиматор 5 соединен с платформой 1, и автоколлиматор 6 установлен неподвижно, модулятор 9 с приводом в виде двигателя 10, установленным со- осно модулятору 9, который выполнен в виде полого щелевого цилиндрического растра 1 1 , длина . одной из щелей 25 12 которого отлична от длины остальных щелей,блока 13 обработки информации, подключенного одним входом к одному автоколлиматору 5, а вторым входом - к выходу другого автоколлиматора 6, и блока 14 питания, соеди- ненного с соответствующими входами двигателя 10,
Устройство работает следующим образом,
Модулятор 9 приводят во вращение двигателем 1Q с постоянной скоростью, Автоколлиматоры 5 и 6 формируют па- раллельные световые потоки, направляя их в сторону зеркал 7 и 8, установ- ленных на кронштейнах 3 и 4 одновременно жестко соединенных с корпусами автоколлиматоров 5 и 6, Отраженные от зеркал 7 и 8 световые потоки попадают на щели 11 и 12 в цилиндрической поверхности модулятора 9, В случае появления на пути светового пучка любой щели модулятора 9 он проходит через щель и, отразившись от зеркала
35
40
45
ров 5 и 6, Действительное значение угла поворота платформы вычисляют в соответствии с формулой о{ o(am+kt , где tj - усредненное значение временных интервалов; d - угловой размер шага растра; m - число импульсов на входе вычислителя между двумя марки рованными импульсами измерительного и опорного каналов
Формула изобретения
Устройство для измерения угла поворота объекта, содержащее платформу предназначенную для скрепления с объектом, два фотоэлектрических автоколлиматора, один из которых соеди нен с платформой, а другой установле неподвижно, модулятор с приводом, установленный соосно платформе, два плоских зеркала и блок обработки ин формации, отличающееся тем, что, с целью упрощения конструкции, одно из зеркал жестко соединено с корпусом первого автоколлиматора, другое закреплено неподвижно, а модулятор выполнен в виде полого щелевого цилиндрического растра, длина одной из щелей которого отлична от длины о тальных щелей, и установленного так, что щели расположены между автоколли маторами и зеркалами.
лами, поступающими от автоколлимато
ров 5 и 6, Действительное значение угла поворота платформы вычисляют в соответствии с формулой о{ o(am+kt , где tj - усредненное значение временных интервалов; d - угловой размер шага растра; m - число импульсов на входе вычислителя между двумя маркированными импульсами измерительного и опорного каналов.
Формула изобретения
Устройство для измерения угла поворота объекта, содержащее платформу, предназначенную для скрепления с объектом, два фотоэлектрических автоколлиматора, один из которых соединен с платформой, а другой установлен неподвижно, модулятор с приводом, установленный соосно платформе, два плоских зеркала и блок обработки информации, отличающееся тем, что, с целью упрощения конструкции, одно из зеркал жестко соединено с корпусом первого автоколлиматора, другое закреплено неподвижно, а модулятор выполнен в виде полого щелевого цилиндрического растра, длина одной из щелей которого отлична от длины остальных щелей, и установленного так, что щели расположены между автоколлиматорами и зеркалами.
