Изобретение относится к средствам Испытаний мотопил и может быть использовано на машиностроительных за- 9одах8 выпускающих мотопипы, в лесной и деревообрабатывающей промышленности 0
Цель изобретения - приближение результатов испытаний к эксплуатационным и повышение удобства работы,,
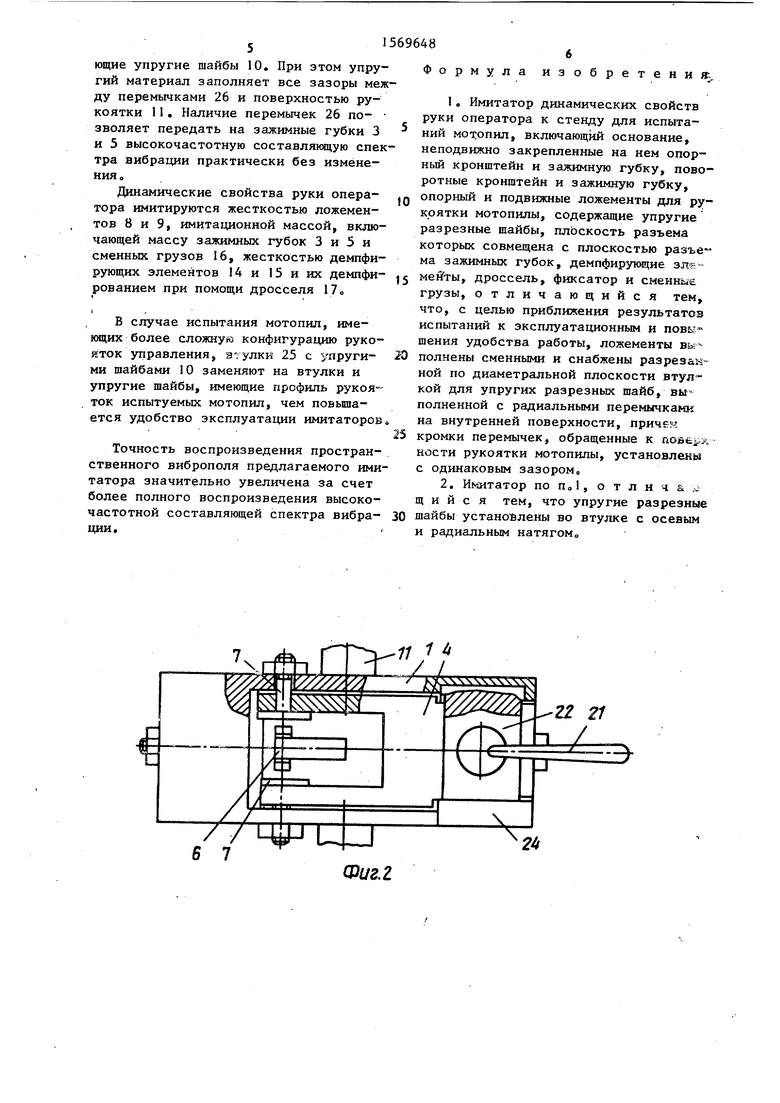
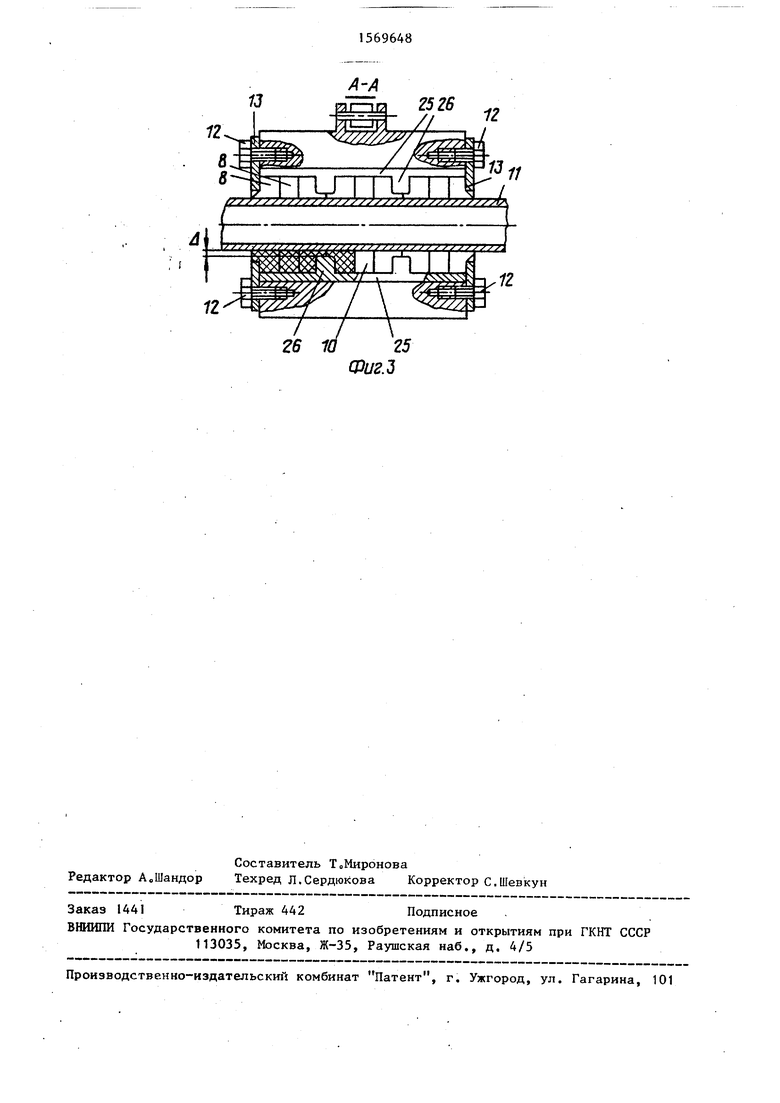
На фиг.1 показан имитатор, общий вид; на фиго2 - то же, вид сверху; На фиг.З - разрез А-А на .
Имитатор динамических свойств руки оператора содержит неподвижное основание 1, неподвижные опорный кронштейн 2 и зажимную губку 3, поворотные кронштейн 4 и зажимную губку 5, установленные на шарнирах 6 и 7 на основании 1 с Зажимные губки 3 и 5 снабжены соответственно опорным 8 и подвижным 9 ложементами, выполненными в виде набора разрезных упругих шайб 10, и предназначенными для рукоятки 1 1 мотопилы,, Для устранения выпадания упругих шайб 10 на зажимных губках 3 М 5 закреплены винтами 12 ограничители 13, выполненные в виде полуколец,. Демпфирующие элементы 14 и 15, размещенные между зажимными губками 3 и 5 м кронштейнами 2 и 4, выполнены из полимерного материала, например резины, и имеют вид соосно усеченных пустотелых конусов. Меньшими основаниями элементы 14 и 15 закреплены в опорных кронштейнах 2 и.4, а большими - на зажимных губках 3 и 5 при помощи сменных грузов 16, выполненных в виде разрезных полуколец. Дроссель 17, имеющий вид резьбовой иглы, изменяют чроходное сечение каналов 18 и 19, связывающих между собой внутренние полости элементов 14 и 15, и тем самым изменяет коэффициент демпфирования Имитатора. Фиксатор 20, имеющий рукоятку 21 и пластину 22, установлен на Поворотном кронштейне 4, а гнезда 23 и 24, в которые входят концы пластины 22, закреплены на основании 1.
5
0
5
0
5
0
5
0
5
Ложементы 8 и 9 выполнены сменными и снабжены разрезанной по диаметральной плоскости втулкой 25, снабженной радиальными перемычками 26, выполненными на ее внутренней поверхности,, Разрезные упругие шайбы 10 установлены между перемычками 26 с осевым натягом, причем кромки перемычек 26 и шайб 10, обращенные к поверхности рукояток 11 мотопилы, установлены эквидистантно, соответственно с зазором Д и радиальным натягом„ Зазор d служит для компенсации погрешностей изготовления рукояток 110
Работа с имитатором динамических свойств руки оператора осуществляется в следующей последовательности,,
Рукоятку 21 фиксатора 20 поворачивают до момента выхода концов пластины 22 из гнезд основания 1. Поворотный кронштейн 4, а также зажимную губку 5 с ложементом 9 поворачивают относительно шарниров 6 и 7. После этого освобождают винты 12, снимают ,ограничители 13 с зажимных губок 3 и 5 и удаляют опорный 8 и подвижный 9 ложементы с втулкой 25 и упругими шайбами 10о Затем устанавливают необходимые ложементы 8 и 9 с втулкой 25 и разрезными упругими шайбами 10 для рукоятки 11 исследуемой модели мотопилы и закрепляют ограничители 13 при помощи винтов 12. Рукоятку 11 мотопи- г.ы устанавливают в опорный ложемент Ј неподвижной захимной губки 3 и закрепляют в ней поворотом и последующей фиксацией поворотного кронштейна 4 с зажимной губкой 5. Фиксация кронштейj ьй. 4 на основании 1 осуществляется поворотом рукоятки 21 с пластиной 22 в обратной последовательности. При этом за счет возникновения радиальных усилий разрезные упругие шайбы 10 деформируются Отсутствие зазоров между поверхностью рукоятки 11 и упругими шайбами 10 при замыкании губок 3 и 5 с ложементами 8 и 9 создает дополнительные радиальные усилия, деформирующие упругие шайбы 10. При этом упругий материал заполняет все зазоры между перемычками 26 и поверхностью рукоятки 11. Наличие перемычек 26 позволяет передать на зажимные губки 3 и 5 высокочастотную составляющую спектра вибрации практически без изменения
1« Имитатор динамических свойств руки оператора к стенду для испытаний мотопил, включающий основание, неподвижно закрепленные на нем опорный кронштейн и зажимную губку, поворотные кронштейн и зажимную губку,
Динамические свойства руки опера-, опорный и подвижные ложементы для ру- тора имитируются жесткостью ложемен- коятки мотопилы, содержащие упругие тов 8 и 9, имитационной массой, вклю- разрезные шайбы, плоскость разъема чающей массу зажимных губок 3 и 5 и которых совмещена с плоскостью разъе сменных грузов 16, жесткостью демпфи- ма зажимных губок, демпфирующие зл -рующих элементов 14 и 15 и их демпфи-,5 менты, дроссель, фиксатор и сменное
рованием при помощи дросселя 17
грузы, отличающийся тем,
рмула
изобретения
1« Имитатор динамических свойств руки оператора к стенду для испытаний мотопил, включающий основание, неподвижно закрепленные на нем опорный кронштейн и зажимную губку, поворотные кронштейн и зажимную губку,
грузы, отличающийся тем,
| название | год | авторы | номер документа |
|---|---|---|---|
| Иммитатор динамических свойств руки оператора к стенду для испытания механизированных инструментов | 1984 |
|
SU1226100A1 |
| Имитатор динамических свойств руки оператора к стенду для испытания механизированных инструментов | 1984 |
|
SU1315848A1 |
| Манипулятор для стенда испытаний мотоинструментов | 1976 |
|
SU595648A1 |
| Стенд для испытания бензомоторных пил | 1990 |
|
SU1749757A1 |
| Нажимное устройство к стендудля иСпыТАНия МЕХАНизиРОВАННыХиНСТРуМЕНТОВ | 1976 |
|
SU845029A1 |
| Стенд для испытания мотопил | 1983 |
|
SU1107029A1 |
| Стенд для испытания мотопил | 1981 |
|
SU954845A1 |
| Стенд для испытания переносных моторных пил | 1991 |
|
SU1799728A1 |
| Стенд для испытания мотопил | 1978 |
|
SU883694A1 |
| ЛЕСОПИЛЬНАЯ УСТАНОВКА | 1996 |
|
RU2103160C1 |
Изобретение относится к лесной и деревообрабатывающей промышленности. Цель изобретения - приближение результатов испытаний к эксплуатационным и повышение удобства работы. Имитатор динамических свойств руки оператора содержит неподвижное основание 1, опорный кронштейн 2 с зажимной губкой 3, поворотный кронштейн 4 с зажимной губкой 5. Поворотный кронштейн 4 и зажимная губка 5 установлены на шарнирах 6, 7 на основании 1. Зажимные губки 3, 5 снабжены опорным 8 и подвижным 9 ложементами в виде набора разрезных упругих шайб. Между зажимными губками 3, 5 и кронштейнами 2, 4 размещены демпфирующие элементы 14, 15. К зажимным губкам 3, 5 демпфирующие элементы 14, 15 прикреплены при помощи сменных грузов 16. Дроссель 17, изменяющий проходное сечение каналов 18, 19, служит для регулировки коэффициента демпфирования имитатора. Фиксатор 20, имеющий рукоятку 21 и пластину 22, установлен на поворотном кронштейне 4. Гнезда, в которые входят концы пластины 22, закреплены на основании 1. Ложементы 8, 9 выполнены сменными и снабжены разрезанной по диаметральной плоскости втулкой 25 с радиальными перемычками. При работе с имитатором наличие перемычек 26 позволяет передать на зажимные губки 3, 5 высокочастотную составляющую спектра вибрации практически без изменения. При испытании мотопилы исследуемой модели ложементы 8, 9 заменяют ложементами, соответствующими профилю ее рукоятки.
что, с целью приближения результатов испытаний к эксплуатационным и повышения удобства работы, ложементы вь-- яток управления, ъ- улкк 25 с упруги- 20 полчены сменными и снабжены разрезам- ми шайбами 10 заменяют на втулки и ной по диаметральной плоскости втулкой для упругих разрезных шайб, выполненной с радиальными перемычками на внутренней поверхности, приче« 25 кромки перемычек, обращенные к поъьь - нести рукоятки мотопилы, установлены
В случае испытания мотопил, имеющих более сложную конфигурацию рукоупругие шайбы, имеющие профиль рукояток испытуемых мотопил, чем повышается удобство эксплуатации имитаторов
Точность воспроизведения пространственного виброполя предлагаемого имитатора значительно увеличена за счет более полного воспроизведения высокочастотной составляющей спектра вибра- 30 шайбы установлены во втулке с осевым ции. и радиальным натягом,,
с одинаковым зазором,
rrvv/
/-у-цфн UJ-J
67
шайбы установлены во втулке с осевым и радиальным натягом,,
с одинаковым зазором,
2Ь
Фиг. г
А-А
12
12
26 1U25
Фиг.З
2526
12
12
| Иммитатор динамических свойств руки оператора к стенду для испытания механизированных инструментов | 1984 |
|
SU1226100A1 |
