/
(Л
С
«ь .
т
СП
01
с 1 оо
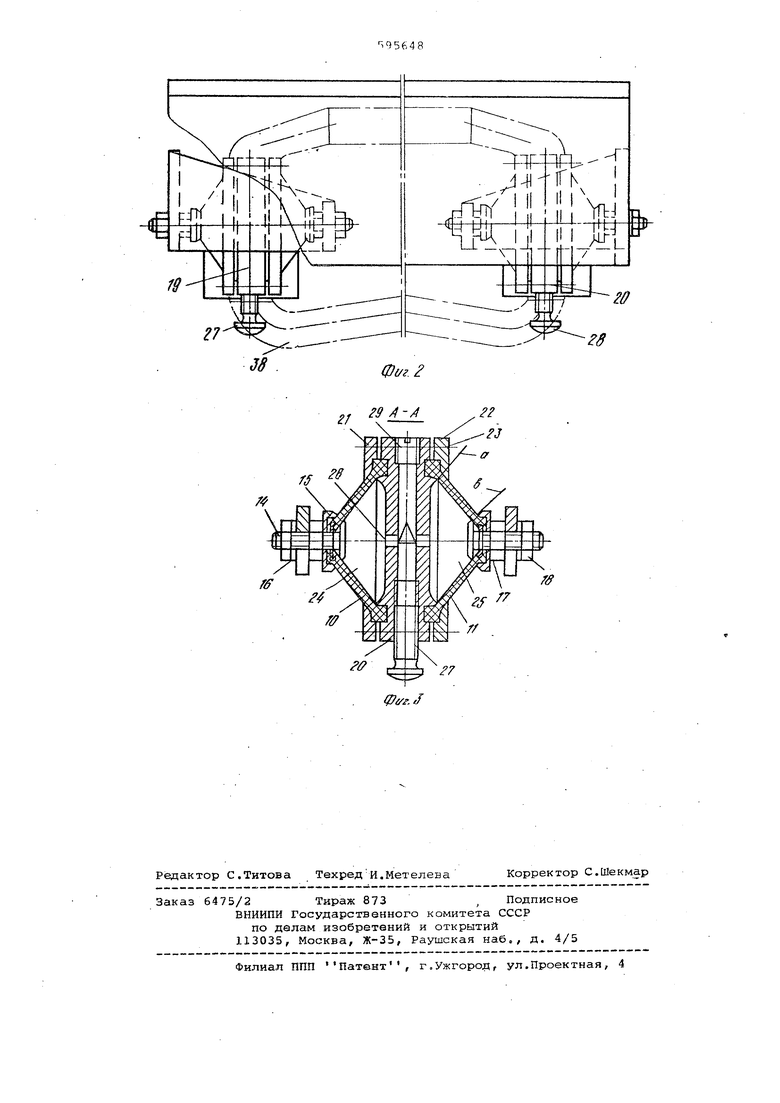
./ Изобретение относится к средствам вибрационных испытаний механизирован ного инструмента, например мотопил, И может найти применение на машиностроительных заводах, разрабатьшающих стенды, имитирующие руки оператора. Известны манипуляторы, содержащие основание, захваты для рукояток, демпфирующие элементы и механизмы фиксации рукояток 1, По технической сущности и достига емому эффекту наиболее близким к изобретению является манипулятор для испытательного стенда мотоинструментов, например мотопил, содержащий ос нование, связанные с ним .захваты с измеряемой массой и имитаторы в виде равножестких упругих элементов, соединякщие. захваты с основанием 2, Недостатками этих манипуляторов являются сложная конструкция, а также трудность имитации условий испытаний, близких к эксплуатационныг/5. Целью изобретения является упроще ние конструкции манипулятора и приближение условий испытания к эксплуатационным. Для этого в предлагаемом манипуля юре каждый равножесткий упругий эле мент выполнен в виде конусообразных оболочек, обращенных одна к другой основаниями, выполненными жесткими, скрепленными между собой и имеющими дросселирующие отверстия, соединяющие полости оболочек, На фиг. 1 изображен предлагае№ й манипулятор, вид спереди; на фиг, 2 то же, вид сверху; на фиг. 3 - разрез А-А на фиг, 1, Манипулятор содержит основание 1 захваты 2 и 3 с изменяемой массой в виде сменных грузов 4 и 5, прикрепляемых к захватам винтами б и 7, и имитаторы 8 и 9 в виде равножестких упругих элементов 10 и 11, выполнен ных из полимерного материала, напри мер резины, и имекядих вид расположе ных соосно конусообразных оболочек углом при верщине, равным 10Э±1° Бо ковые поверхности упругих элементов имеют вид концентрических конически поверхностей с вершинами, расположе ными на оси упругих элементов. Мень шими основаниями каждый из упругих элементов жестко закреплен в гнезда опор 12 и 13 основания с помощью ви тов 14, шайб 15 и 16 и гаек 17 и 18 а большими основаниями в гнездах ко пусов 19 и 20 захватов с помощью кр шек 21 и 22 и винтов 23, а боковые поверхности упругих элементов и поверхности айв опорных элементов 14, 15, 20, 2i, 22 взаимно перпендикулярны. Выполнение упругих элементов с углом при вершине, равным взаимной перпендикулярности образующих поверхностей упругих элементов и поверхностей ct и в приводит к равенству жесткостей в осевом направлении. Внутренние полости 24 и 25 каждого из имитаторов соединены собой дросселирующим отверстием 26 и заполнены средой, например рабочей жидкостью. Механизм изменения проходного сечения дросселирующего отверстия 26 выполнен в виде игл 27 и 28, каждая из которых может перемещаться в резьббвых отверстиях корпуса 19 и 20 соответственно, закрытых пробкой 29. Захваты 2 и 3 состоят из корпусов 19 и 20, жестко соединенных с кронштейнами 30 и 31, и смонтированных в них на осях 32 и 33 откидных винтов 34 и 35, стягивающих .кронштейны 30 и 31 с захватами 2 и 3 при повороте винтов относительно осей 36 и 37. Манипулятор работает следующим образом. Объект 38 (мотопила) рукоятка1ми 39 и 40 устанавливается в кронштейнах 30 и 31 и закрепляется за хватами с помощью откидных винтов 34 и 35. На иccлeдyвr 1ыx режимах пространственная вибрация от двигателя (не показан) передается на рукоятки и захваты имитатора, что приводит к возникновению определенных частотнозависимых сил в имитаторах, препятствующих перемещению двигателя и ра.мы мотопилы в пространстве. . При пространств энных перемещениях рукояток мотопилы отн9сительно осно.вания с опора.ми-объемы полостей каждого из имитаторов периодически изменяются , что приводит к увеличению (уменьшению) давления среды в этих полостях и ее перетеканию из одной полости в другую. Поворотом игл 27 и 28 3 корпусах 19 и 20 производится изменение проходного сечения дросселирующего отверстия 26 и тем самым коэффициента демпфирования рук оператора. Установкой сменных грузов различной массы на захватах регулируют приведенную массу рук оператора, участвующую в колебаниях.
rff
Ф(/г 2
9 -А
/7
Ipyf.J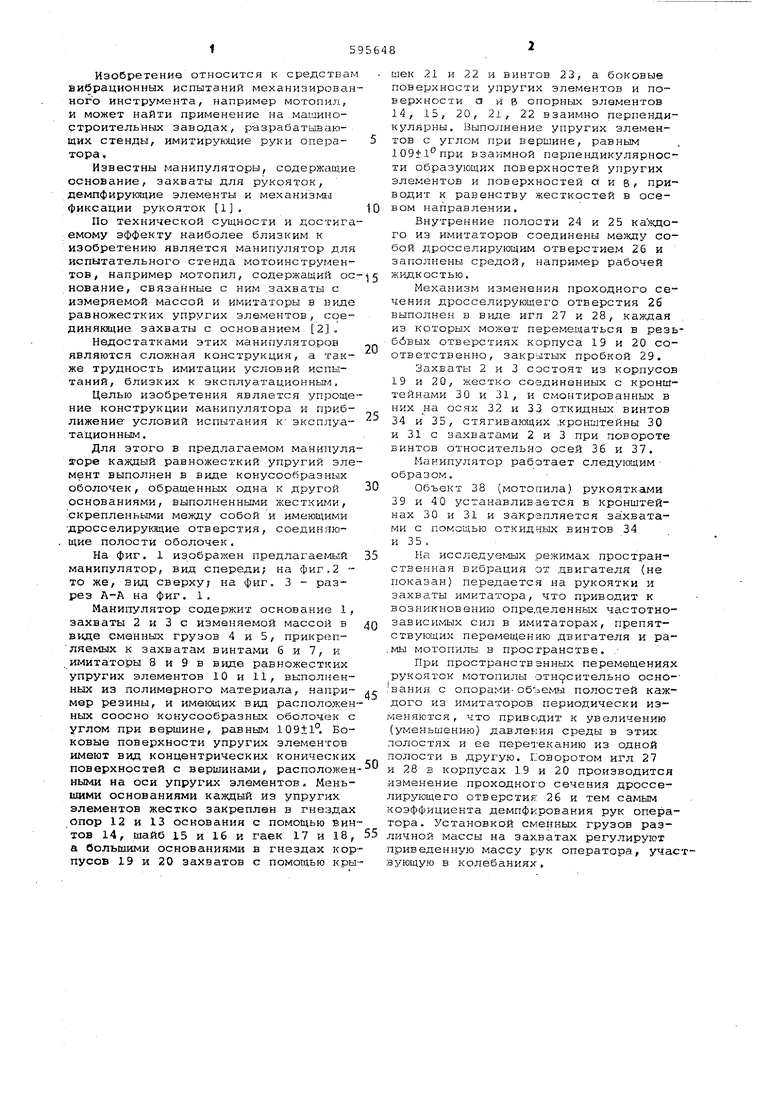
| название | год | авторы | номер документа |
|---|---|---|---|
| Нажимное устройство к стендудля иСпыТАНия МЕХАНизиРОВАННыХиНСТРуМЕНТОВ | 1976 |
|
SU845029A1 |
| Имитатор динамических свойств руки оператора к стенду для испытаний мотопил | 1988 |
|
SU1569648A1 |
| Стенд для испытания бензомоторных пил | 1990 |
|
SU1749757A1 |
| Нажимное устройство к стенду для испытания механизированных инструментов | 1977 |
|
SU648864A1 |
| Нажимное устройство к стенду для испытания механизированных инструментов | 1982 |
|
SU1065710A2 |
| Иммитатор динамических свойств руки оператора к стенду для испытания механизированных инструментов | 1984 |
|
SU1226100A1 |
| Стенд для испытания мотопил | 1983 |
|
SU1107029A1 |
| Стенд для испытания мотопил | 1989 |
|
SU1814045A1 |
| Нажимное устройство к стенду для испытания механизированных инструментов | 1980 |
|
SU868402A1 |
| Стенд для испытания переносных моторных пил | 1991 |
|
SU1799728A1 |
МАНИПУЛЯТОР ДЛЯ СТЕНДА ИСПЫТАНИЙ МОТОИНСТРУМБНТОВ, например мотопил, содержащий основание, связанные с ним захваты с изменяемой массой и имитаторы в виде равножестких упругих элементов, соединяющие захваты с основанием, отличающий^ с я тем, что, с целью упрощения конструкции манипулятора и приближения условий испытания к эксплуатационным, калсдый равножесткий упругий элемент выполнен в виде конусообразных оболочек , обращенных одна к другой основа-, ниями,выполненными жесткими,скрепленными между собой и имеющими дросселирующие отверстия,соединяющие полости ' оболочек,
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ИМИТАТОР ВХОДНОГО МЕХАНИЧЕСКОГО ИМПЕДАНСА РУКИ ЧЕЛОВЕКА | 0 |
|
SU380968A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
