частности мото- 1, и может найти применение на
1
Изобретение относится к средства вибрационных испытаний механизированых инструментов, в пил предприятиях, выпускающих мотопилы.
Цель изобретения - повьшение надежности за счет того, что электромагнитные генераторы создают дополнтельные возмущающие силы, направленные вдоль оси генераторов и изменяющиеся по направлению, частоте и амплитуде .
На фиг.1 изображен имитатор динамических свойств руки оператора к стенду для испытания механизирован- ных инструментов, общий вид; на фиг. вид А на фиг.1; на фиг.З - вид Б на фиг.1; на фиг.4 - разрез В-В на фиг. на фиг.З - разрез Г-Г на фиг.2.
Имитатор содержит основание 1, кронштейны 2 и 3, упругодемпфирующи .элементы 4, зажимные губки 5 и 6 с упругими ложементами 7, связанные с кронштейнами 2 и 3 соответственно через упругодемпфирующие элементы 4 Кронштейн 2 жестко закреплен на основании, а кронштейн 3 установлен на основании с возможностью поворот вокруг оси 8, подпружинен к основанию 1 пружиной 9 и фиксируется относительно кронштейна 2 при помощи поворотной планки 10 и эксцентриковог зажима 11, Упругодемпфирующие элементы 4 выполнены из полимерного материала в виде пустотелого усеченного конуса и крепятся большими ос нованиями к зажимным губкам 5 и 6 при помощи сменных грузов 12, а меншими основаниями - к крО1-Ептейнам 2 и 3.
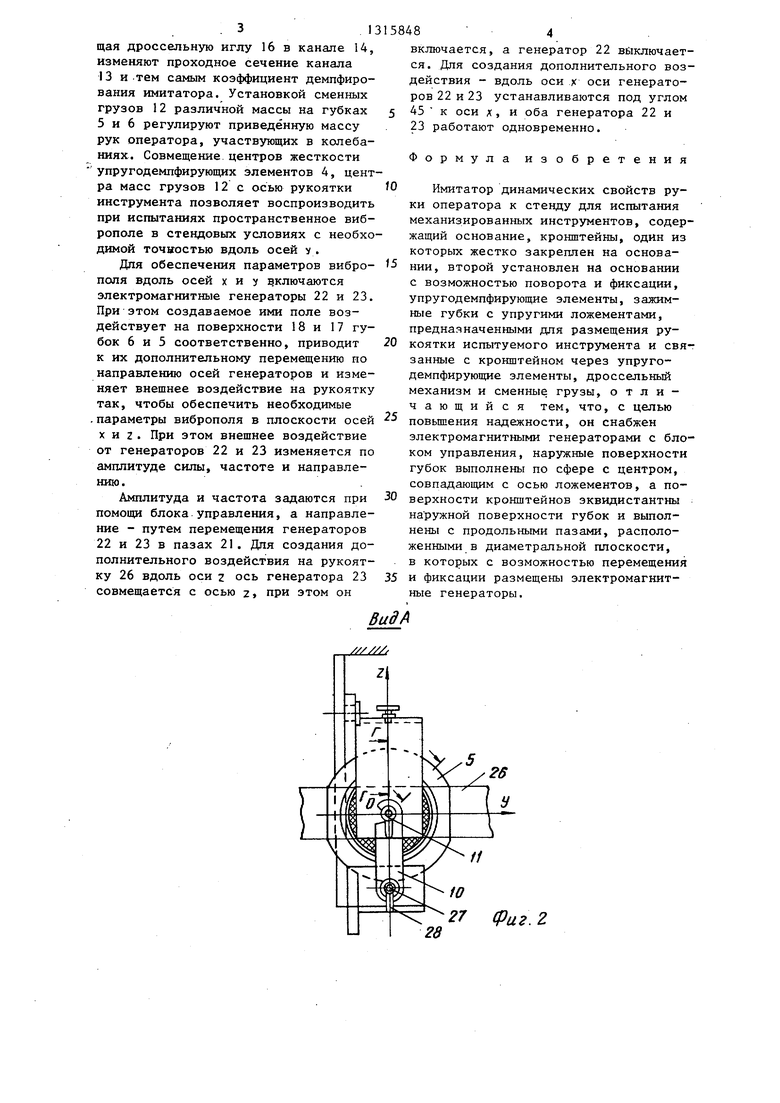
В зажимнь1х губках 5 и 6 выполнен каналы 13 и 14 соответственно, которые соединяют между собой внутренни полости 15 упругодемпфирующих элеметов 4. В канале 13 в месте его пересечения с каналом 14 с возможностью осевого перемещения установлена дросельная игла 16, которая совместно с каналами 13 и 14 образует дросселный механизм. Наружные поверхности
17и 18 губок 5 и 6 соответственно выполнены по сфере, центр которой совпадает с осью ложементов 7.
Кронштейны 2 и 3 имеют поверхности 1 9 и 20 соответственно, которые эквидистантны наружным поверхностям
18и 17 губок 6 и 5 и выполнены с продольными пазами 21, расположенны
o
5
0
5
0
5
0
5
0
5
ми в диаметральной плоскости. В пазах 21 кронштейнов 2 и 3 с возможностью продольного перемещения размещены электромагнитные генераторы 22 и 23, которые фиксируются при помощи винтов 24 со стопорной гайкой 25 и связаны с блоком управления (не показан) . Ложементы 7 предназначены для размещения рукоятки 26 испытуемого инструмента (не показан). Планка 10 установлена на кронштейне 2 с возможностью поворота вокруг оси 27 эксцентрикового зажима 28.
Имитатор динамических свойств руки оператора работает следующим образом.
Поворотом рукояток эксцентриковых зажимов 11 и 28 освобождается планка 10 и поворачивается вокруг оси 27. Под действием пружины 9 кронштейн 3 поворачивается вокруг оси 8 вместе с упругодемпфирующим элементом 4 и зажимной губкой 5 с размещенной в ней половиной ложемента 7. Затем рукоятка 26 испытуемого механизированного инструмента помещается в половину ложемента 7 зажимной губки 6, связанной с неподвижным кронштейном 2, и закрепляется оператором путем поворота кронштейна 3 в исходное положение с последующей его фиксацией поворотом планки 10 вокруг оси 27 и закреплением эксцентриковыми зажимами 1 1 и 28. При этом рукоятка 26 испытуемого механизированного инструмента надежно удерживается в ложементе 7. После этого-винтами 24 производят регулирование зазора между сердечниками генераторов 22 и 23 и сферическими поверхностями 18 и 17 губок 6 и 5 соответственно и фиксируют положение генераторов стопорными гайками 25 .
Затем включают испытуемьй механизированный инструмент, например мотопилу. При работе инструмента возникающие пространственные перемещения рукоятки 26 относительно основания 1 воспринимаются ложементом 7, массой зажимных губок 5 и 6 и упругодемп- фирующими элементами 4. При пространственных колебаниях рукоятки 26 объем замкнутых полостей 15 упруго- демпфирующих элементов 4, соединен- libix с губками 5 и 6, периодически изменяется, что приводит к перетеканию воздуха из одной полости в другую через каналы 13 и 14. Переме15
щая дроссельную иглу 16 в канале 14, изменяют проходное сечение канала 13 и тем самым коэффициент демпфирования имитатора. Установкой сменных грузов 12 различной массы на губках 5 5 и 6 регулируют приведённую массу рук оператора, участвующих в колебаниях. Совмещение центров жесткости
упругодемпфирующих элементов 4, центра масс грузов 12 с осью рукоятки Ю инструмента позволяет воспроизводить при испытаниях пространственное виброполе в стендовых условиях с необходимой точностью вдоль осей v.
Для обеспечения параметров вибро- поля вдоль осей х и у включаются электромагнитные генераторы 22 и 23. При этом создаваемое ими поле воздействует на поверхности 18 и 17 губок 6 и 5 соответственно, приводит к их дополнительному перемещению ио направлению осей генераторов и изменяет внешнее воздействие на рукоятку так, чтобы обеспечить необходимые
параметры виброполя в плоскости осей X и Z. При этом внешнее воздействие от генераторов 22 и 23 изменяется по амплитуде силы, частоте и направлению.
Амплитуда и частота задаются при помощи блока управления, а направление - путем перемещения генераторов 22 и 23 в пазах 21. Для создания доолнительного воздействия на рукояту 26 вдоль оси 2 ось генератора 23 совмещается с осью 2 при этом он
20
35
30
включается, а генератор 22 вйключает- ся. Для создания дополнительного воздействия - вдоль оси X оси генераторов 22 и 23 устанавливаются под углом 45 к оси X, и оба генератора 22 и 23 работают одновременно.
Формула изобретения
Имитатор динамических свойств руки оператора к стенду для испытания механизированных инструментов, содержащий основание, кронштейны, один из которых жестко закрегшен на основании, второй установлен на основании с возможностью поворота и фиксации, упругодемпфирующие элементы, зажимные губки с упругими ложементами, предназначенными для размещения рукоятки испытуемого инструмента и связанные с кронштейном через упруго- демпфирующие элементы, дроссельный механизм и сменные грузы, отличающийся тем, что, с целью повьш ения надежности, он снабжен электромагнитными генераторами с блоком управления, наружные поверхности губок выполнены по сфере с центром, совпадаю1цим с осью ложементов, а поверхности кронштейнов эквродистантны на ружной поверхности губок и выполнены с продольными пазами, расположенными в диаметральной плоскости, в которых с возможностью перемещения и фиксации размещены электромагнитные генераторы.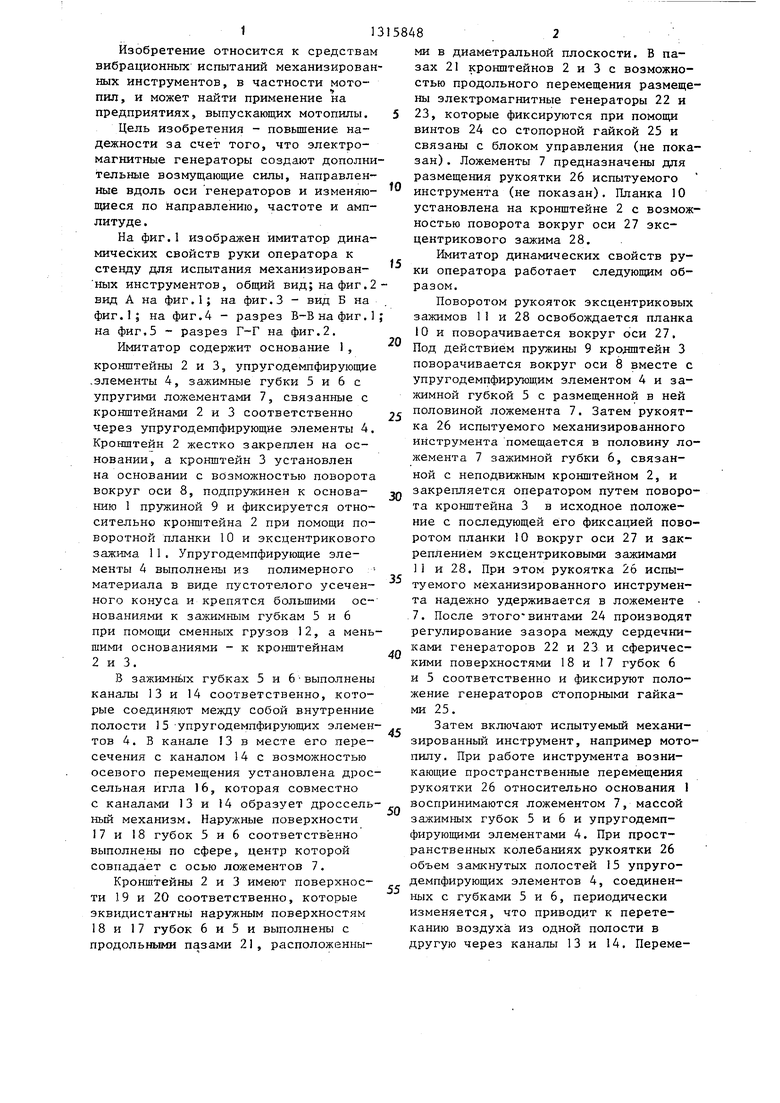
| название | год | авторы | номер документа |
|---|---|---|---|
| Иммитатор динамических свойств руки оператора к стенду для испытания механизированных инструментов | 1984 |
|
SU1226100A1 |
| Имитатор динамических свойств руки оператора к стенду для испытаний мотопил | 1988 |
|
SU1569648A1 |
| Стенд для испытания переносных моторных пил | 1991 |
|
SU1799728A1 |
| Стенд для испытания мотопил | 1989 |
|
SU1814045A1 |
| Стенд для испытания бензомоторных пил | 1990 |
|
SU1749757A1 |
| Стенд для испытания переносных моторных пил | 1988 |
|
SU1668899A1 |
| УПАКОВКА ДЛЯ РУЧНОГО ИНСТРУМЕНТА | 2007 |
|
RU2359813C2 |
| Стенд для испытания мотопил | 1981 |
|
SU998900A2 |
| КОМПЛЕКТ ДЛЯ РЕПОЗИЦИИ И НАРУЖНОЙ ФИКСАЦИИ ОТЛОМКОВ КОСТЕЙ КОНЕЧНОСТЕЙ И/ИЛИ ТАЗА | 2015 |
|
RU2606269C2 |
| Нажимное устройство к стендудля иСпыТАНия МЕХАНизиРОВАННыХиНСТРуМЕНТОВ | 1976 |
|
SU845029A1 |
Изобретение относится к средствам вибрационных испытаний механизированных инструментов. Цель изобретения - .повьшение надежности имитатора - достигается за счет создания дополнительных возмущающих сил, изменяющихся по направлению, частоте и амплитуде. Имитатор содержит основание 1, кронштейны 2 и 3, упругодемп- фирующие элементы 4, зажимные губки 5и 6 с упругими ложементами 7. Наружные поверхности 17 и 18 губок 5 и 6выполнены сферическими, центр их совпадает с осью ложемента 7. В губках 5 и 6 выполнены пересекающиеся каналы, которые соединяют между собой полости I5 упругодемпфирующих элементов 4, В месте пересечения каналов установлена дроссельная игла. Кронштейны 2 и 3 имеют поверхности 19 и 20, эквидистантные наружным поверхностям 17 и 18 губок 5 и 6, и продольные пазы 21. В пазах 21 с возможностью перемещения и фиксации размещены электромагнитные генераторы 22 и 23, предназначенные для взаимодействия с наружной поверхностью губок 5, 6. 5 ил. i (Л 21 23 го 22 25 24 Фиг. t
Вид б
в-в
Фиг.З
ФигЛ
15
13
Составитель Ю.Сергеев Редактор О.Юрковецкая Техред А.Кравчук Корректор С.Шекмар
Заказ 2352/44Тираж 776Подписное
ВНИИПИ Государственного комитета СССВ
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг. 5
| Иммитатор динамических свойств руки оператора к стенду для испытания механизированных инструментов | 1984 |
|
SU1226100A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
