1
И-,5о )ретение относился к средством ни.Орллиоиных испытаний мехлннзирован нмх инструментов, например мотонил.
Цель изобретения - обеснечение более нолной имитации динамических свойств руки оператора и повышение удобства эксплуатации.
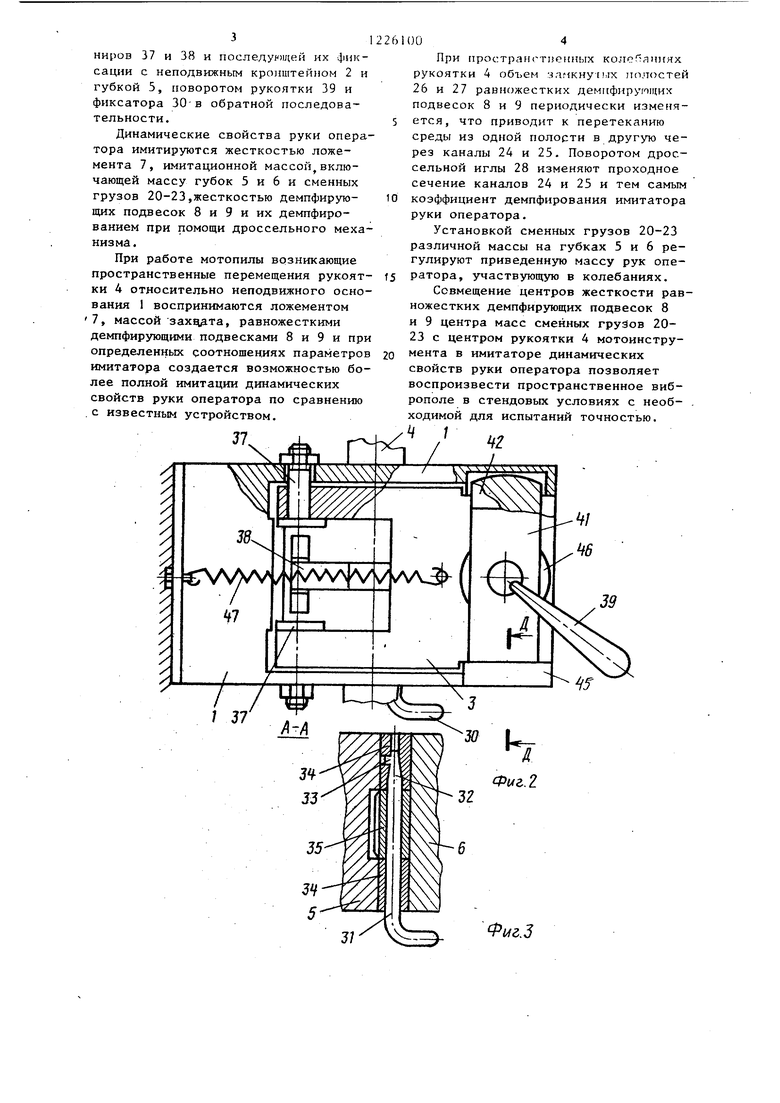
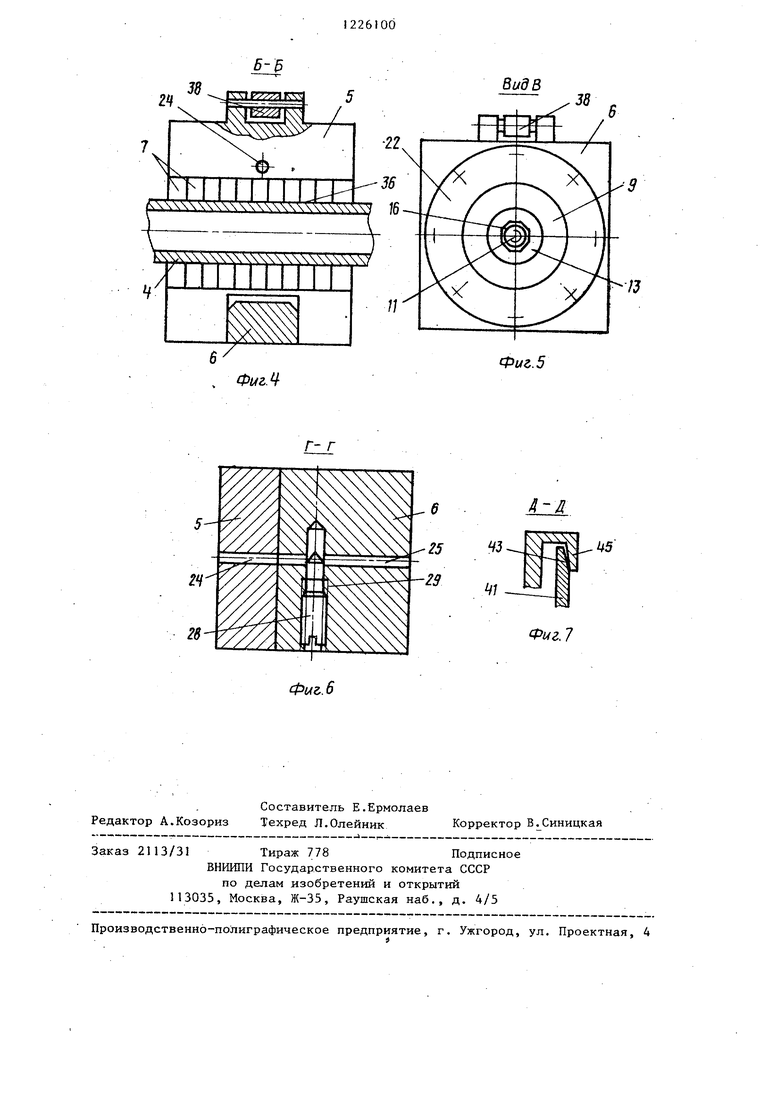
На фиг. 1 изображен имитатор динамических свойств руки оператора, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 1; на фиг. 5 - вид В на фиг.1; на фиг. 6 - разрез Г-Г на фиг. 1; на фиг. 7 - разрез Д-Д на фиг. 2.
Имитатор динамических свойств руки оператора содержит неподвижное основание 1, опорные кронштейны 2 и 3, захват для рукоятки 4 мотоинструмента, выполненный в виде зажимных губок 5. и 6, ложемент 7, установленный между губками 5 и 6, а также рав ножесткие демпфирующие подвески 8 и 9, расположенные между опорными кронштейнами 2 и 3 и губками 5 и 6. Каждая равножесткая демпфирующая подвеска 8 и 9 вьтолнена из полимерного материала, например резины, и имеет вид соосно усеченных пустотелых конусов с углами при вершине, равными 109+1. Меньшими основаниями равножесткие демпфирующие подвески 8 и 9 закреплены при помощи винтов 10 и 11, шайб 12 и 13 и гаек 14- 19 в опорных кронштейнах 2 и 3, большими основаниями - в гнездах зажимных губок 5 и 6 при помощи сменных грузов 20-23, выполненных в виде колец. Дроссельньй механизм выполнен в виде каналов 24 и 25, связывающих между собой внутренние полости 26 и 27 равножестких демпфирующих подвесок 8 и 9 и дроссельной иглы 28, установленной в резьбовом отверстии 29 призмы 6. Фиксатор 30, вьтолненньй в виде стержня 31 с коническим концом 32 и выступом 33j установлен во втулках 34 и 35 губок 5.и 6.
Ложемент 7 выполнен из набора разрезных шайб из упругодемпфиру- ющего материала, например резины. Одна половина набора шайб установлена в зажимной губке 5, а другая половина - в зажимной губке 6 и закре лена, например, при помощи клея. Отверстия 36 в шайбах могут вьшол- няться различной формы для обеспе26100 -
ченпя охвата рукояток мотоинструмсн- та различной конструкции. Плоскость разъема ложемента 7 совмещена с плоскостью .ма губок 5 и 6.
J Подвижный кронштеГлн 3 связан с неподвижным основанием 1 при помощи шарнира 37. Зажимная губка 6 связана с неподвижным кронштейном 2 при помощи шарнира 38. Шарниры 37 и 38
10 расположены соосно в плоскости разъема губок 5 и 6. Фиксация подвижного кронштейна 3 относительно неподвижного, основания 1 производится при помощи поворотного заклиниваю15 щего механизма, состоящего из рукоятки 39, жестко связанной с осью 40, и подвижной пластины 41 со скосами 42 и 43 на концах пластины 41, расположенными в гнездах 44 и 45
20 неподвижного кронштейна 2, а также тарельчатой пружины 46, установленной между пластиной 41 и подвижным кронштейном 3. Последняя установлена для компенсации зазоров и повьште25 ния надежности фиксации подвижного кронштейна 3 с неподвижным кронштей- ном 2. Подвижный кронштейн 3 связан с неподвижным основанием 1 при помощи пружины 47 растяжения.
30 Такая конструкция имитатора динамических свойств руки оператора позволяет совместить центр масс сменных грузов 20-23, центры жесткости равножестких демпфирующих
„ подвесок 8 и 9 с центром рукоятки 4 мотоинструмента.
Работа с имитатором динамических свойств руки оператора осуществляется в следующей последовательности.
Фиксатор 30 поворачивают относительно осевой оси до выхода выступа 33 из гнезда и перемещают вдоль втулок 34 и 35 до момента разъединения губок 5 и 6. Рукоятку 39 по40
45
SO
55
ворачивают до момента выхода концов со скосами 42 и 43 подвижной пластины 41 из гнезд 44 и 45 неподвижного кронштейна 2. Под действием пружины 47 растяжения подвижньй кронштейн 3, а также зажимная губка 6 с ложементом 7 поворачиваются относительно осей шарниров 37 и 38. Рукоятка 4 мотоинструмента устанавливается на набор шайб в зажимной губке 5 и закрепляется в имитаторе динамических свойств руки оператора путем поворота зажимной губки и подвижного кронштейна 3 относительно осей шар312
ниров 37 и 38 и послелукиден их фиксации с неподвижным кронштейном 2 и губкой 5, поворотом рукоятки 39 и фиксатора 30-в обратной последовательности.
Динамические свойства руки оператора имитируются жесткостью ложемента 7, имитационной массой включающей массу губок 5 и 6 и сменных грузов 20-23,жесткостью демпфирующих подвесок 8 и 9 и их демпфированием при помощи дроссельного механизма.
При работе мотопилы возникающие пространственные перемещения рукоятки 4 относительно неподвижного основания 1 воспринимаются ложементом 7, массой захщдта, равножесткими демпфирующими подвесками 8 и 9 и при определенных соотношениях параметров имитатора создается возможностью боее полной имитации динамических свойств руки оператора по сравнению с известньм устройством.
61004
При прострар1гтиеиньгх колеГ-лниях рукоятки 4 объем aariKHyo.jx гкитостей 26 и 27 равножестких демпфирующих подвесок 8 и 9 периодически изменя- 5 ется, что приводит к перетеканию среды из одной полости в другую через каналы 24 и 25. Поворотом дроссельной иглы 28 изменяют проходное сечение каналов 24 и 25 и тем самым 0 коэффициент демпфирования имитатора руки оператора.
Установкой сменных грузов 20-23 различной массы на губках 5 и 6 регулируют приведенную массу рук опе- 5 ратора, участвующую в колебаниях.
Совмещение центров жесткости рав- ножестких демпфирующих подвесок 8 и 9 центра масс сменных грузов 20- 23 с центром рукоятки 4 мотоинстру- 0 мента в имитаторе динамических свойств руки оператора позволяет воспроизвести пространственное виброполе в стендовых условиях с необходимой для испытаний точностью.
гй J/
Фиг.З
Б-5
Вид В
9
Фиг. 5
Фиг. Ч
| название | год | авторы | номер документа |
|---|---|---|---|
| Имитатор динамических свойств руки оператора к стенду для испытаний мотопил | 1988 |
|
SU1569648A1 |
| Имитатор динамических свойств руки оператора к стенду для испытания механизированных инструментов | 1984 |
|
SU1315848A1 |
| Нажимное устройство к стенду для испытания механизированных инструментов | 1977 |
|
SU648864A1 |
| Нажимное устройство к стендудля иСпыТАНия МЕХАНизиРОВАННыХиНСТРуМЕНТОВ | 1976 |
|
SU845029A1 |
| Манипулятор для стенда испытаний мотоинструментов | 1976 |
|
SU595648A1 |
| Стенд для испытания переносных моторных пил | 1988 |
|
SU1668899A1 |
| Стенд для испытания переносных моторных пил | 1991 |
|
SU1799728A1 |
| Стенд для испытания бензомоторных пил | 1990 |
|
SU1749757A1 |
| Нажимное устройство к стенду для испытания механизированных инструментов | 1982 |
|
SU1065710A2 |
| УПАКОВКА ДЛЯ РУЧНОГО ИНСТРУМЕНТА | 2007 |
|
RU2359813C2 |

А - Д
Фиг.7
Фмг.б
| Нажимное устройство к стенду для испытания механизированных инструментов | 1982 |
|
SU1065710A2 |
