Изобретение относится к измерительной технике и может быть использовано для градуировки линейньк акселерометров в динамическом режиме.
Целью изобретения является расшит рение частотного диапазона градуировки.
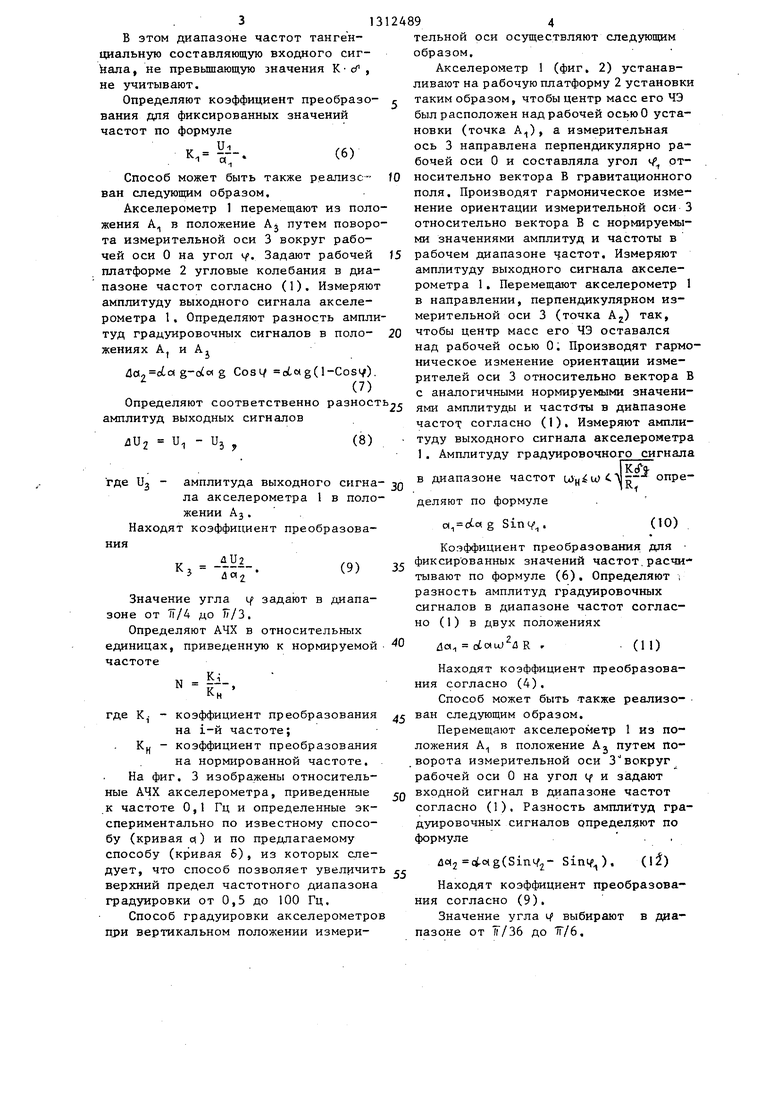
На фиг, 1 представлена схема реализации способа градуировки акселерометра при горизонтальном располо- жении измерительной оси; на фиг, 2 - схема реализации способа градуировки при вертикальном расположении измерительной оси; на фиг« 3 - амплитуд- йо-частотнь:е характеристики (АЧХ) акселерометра, определенные по известному способу (кривая q) и по предлагаемому способу (кривая б),
На фиг, 1 изображены: акселерометр 1, установленный на рабочую платформу 2 градуировочной установки угловых колебаний, рабочая ось колебаний О которой горизонтальна; измерительная ось 3 акселерометра; А, AJ, АЗ конструктивный центр масс чувствительного элемента (ЧЭ) акселерометра при его различных положениях на платформе 2; R,, R2 - расстояния конструктивного центра масс ЧЭ до рабочей О установки; дК - расстояние между двумя положениями акселерометра при его перемещении в направлении, перпендикулярном измерительной оси 3; i/ - угол поворота измерительной оси 3 вокруг рабочей оси 0; стрелка Б - направ- ление угловых колебаний рабочей платформы 2; стр елка В - направление вектора гравитационного поля (вертикаль) ,
На фиг, 2 изображены: акселерометр 1 при вертикальном положениу оси 3; Ц , kf фиксированные углы отклонения измерительной оси 3 от вектора В гравитационного поля,
Способ осуществляют следующим образом.
Акселерометр 1 (фиг, ) устанавливают на рабочую платформу 2 установки таким образом, чтобы центр мас ЧЭ был расположен над рабочей осью О установки (точка А), а 1змерительна ось 3 направлена по горизонтали и перпендикулярно рабочей оси О, Производят гармоническое изменение ори- ентации измерительной оси 3 относительно вектора В гравитационного поля путем задания нормированных значений амплитуды и частоты угловых
колебаний рабочей платформы 2 в направлении Б в рабочем диапазоне частот. Измеряют амплитуду выходного сигнала акселерометра 1, Перемещают акселерометр 1 в направлении, перпендикулярном измерительной оси 3 (точка А2)а Задают платформе 2 аналогичные нормированные значения амплитуды и частоты угловых колебаний в диапазоне частот, определяемом выражением
Ш R.
в Иi---.
(О
где tOg - верхний предел частотного
диапазона измерений акселе-- рометра;
К - козффициент запаса точности;
с/ - предел допускаемого значения относительной погрешности градуировки; g - ускорение свободного падения;
R - расстояние от рабочей оси установки до измерительной оси акселерометра в первом положении,
Измеряют амплитуду выходного сигнала акселерометра 1, Определяют разность амплитуд входных сигналов в диапазоне частот согласно (1) в двух положениях
Ла tioi g+otau)( g-cicuw R2
(2)
Определяют соответственно разность амплитуд выходных сигналов
ли, и,, (3)
где и и и - амплитуды выходного
акселерометра 1 соответственно в положениях А и А2,
Находят козффициент преобразования
к -
2 Ли,(4)
в диапазоне частот tOj со
Амплитуду градуировочного сигнала
Kc/ S , где
К;,
uj - НИЖНИЙ предел частотного диапазона измерений акселерометра 1, определяют при малых амплитудах угла oia колебаний рабочей платформы 2 по формуле
я oiag
(5)
В этом диапазоне частот тангенциальную составляющую входного сиг- kana, не превьшающую значения K-cf , не учитывают.
Определяют коэффициент преобразо- вания для фиксированных значений частот по формуле
К - а.
(6)
Способ может быть также реализс- ван следующим образом.
Акселерометр 1 перемещают из положения А в положение AJ путем поворота измерительной оси 3 вокруг рабочей оси О на угол v. Задают рабочей платформе 2 угловые колебания в диапазоне частот согласно (1). Измеряют амплитуду выходного сигнала акселерометра 1, Определяют разность амплитуд градуировочных сигналов в поло- жениях А и А,
Zlo, оСа g-c3(« g Cost/ o(,«g(l-Cosi/).
(7)
Определяют соответственно разность амплитуд выходных сигналов
лиг и - Uj
где Uj - амплитуда выходного сигна- ла акселерометра 1 в положении АЗ .
Находят коэффициент преобразования
flU2
3 ЛЯ
(9)
Значение угла i/ задают в диапазоне от 7F/4 до 77/3.
Определяют АЧХ в относительных единицах, приведенную к нормируемой частоте
N , н
где К,- - коэффициент преобразования
на i-й частоте; Kjj - коэффициент преобразования
на нормированной частоте. На фиг, 3 изображены относительные АЧХ акселерометра, приведенные к частоте 0,1 Гц и определенные экспериментально по известному способу (кривая с() и по предлагаемому способу (кривая 6), из которых следует, что способ позволяет увеличит верхний предел частотного диапазона градуировки от 0,5 до 100 Гц.
Способ градуировки акселерометро пун вертикальном положении измери
г
W
1520
зо
35
тельной оси осуществляют следующим образом.
Акселерометр 1 (фиг, 2) устанавливают на рабочую платформу 2 установки таким образом, чтобы центр масс его ЧЭ был расположен над рабочей осью О установки (точка А), а измерительная ось 3 направлена перпендикулярно рабочей оси О и составляла угол относительно вектора В гравитационного поля. Производят гармоническое изменение ориентации измерительной оси 3 относительно вектора В с нормируемыми значениями амплитуд и частоты в рабочем диапазоне частот. Измеряют амплитуду выходного сигнала акселерометра 1, Перемещают акселерометр 1 в направлении, перпендикулярном измерительной оси 3 (точка А2) так, чтобы центр масс его ЧЭ оставался над рабочей осью О, Производят гармоническое изменение ориентации измерителей оси 3 относительно вектора В с аналогичными нормируемыми значениями амплитуды и частоты в диапазоне частот; согласно (1), Измеряют амплитуду выходного сигнала акселерометра 1, Амплитуду градуировочного сигнала
ficdT
в диапазоне частот ).D- опре}к
деляют по формуле
й, g Sint.(10)
Коэффициент преобразования для фиксир ованных значений частот, расчитывают по формуле (6), Определяют i разность амплитуд градуировочных сигналов в диапазоне частот согласно (1) в двух положениях
Ла o.o(LU Л R г
(II)
Находят коэффициент преобразования согласно (4).
Способ может быть также реализован следующим образом,
Перемеп;ают акселерометр 1 из положения А в положение Aj путем Поворота измерительной оси 3 вокруг рабочей оси О на угол ( и задают входной сигнал в диапазоне частот согласно (1). Разность амплитуд градуировочных сигналов определяют по формуле . ,
ЛОг q(-o(g( Sinif). (if)
Находят коэффициент преобразования согласно (9),
Значение угла выбирают в диапазоне от Т/36 до Т/б,
Применение предлагаемого способа градуировки по сравнению с известным способом позволяет при заданном пре-г деле погрешности, не превышающем 1%, расширить верхний предел частотного диапазона градуировки от 0,5 до 100 Гц, В то же время избирательная градуировка в двух положениях сокращает продолжительность процесса более чем на 50%,
Формула изобрете11ия
1, Способ градуировки линейных акселерометров, заключающийся в том, что градуируемый акселерометр устанавливают на рабочей платформе с горизонтальной осью колебаний так, что измерительная ось акселерометра расположена в плоскости платформы, перпендикулярной оси ее колебаний, а центр масс чувствительного элеме.нта акселерометра не совпадает с осью колебаний Платформы, задают акселерометру входной сигнал путем гармонического изменения ориентации его измерительной оси относительно век- тора гравитационного поля при колебаниях рабочей платформы, перемещают акселерометр на рабочей платформе в направлении, перпендикулярном измерительной оси акселерометра таким образом, чтобы центр масс его чувствительного элемента не совпадал с осью колебаний платформы, и повторно задают акселерометру входной сигнал путем гармонического .изменения ориентации его измерительной оси
относительно вектора гравитационного поля, отличающийся тем, что, с целью расширения частотного диапазона градуировки, при
установке акселерометра центр масс его чувствительного элемента располагают вьш1е горизонтальной плоскости, проходящей через ось колебаний платформы,
2, Способ поп, 1, отличающийся тем, что перемещение градуируемого акселерометра на рабочей платформе из первого положения во второе осуществляют поворотом
его измерительной оси вокруг оси колебаний платформы на фиксированный угол,
3, Способ попп, 1и2, отли- чающийся тем, что входной сигнал в обоих положениях задают в диапазоне частот
U)g / си 7/
где u)g - верхний предел частотного диапазона измерений акселерометра;
К. - коэффициент запаса по точности;
tf - предел допустимого значения относительной.погрешности градуировки;
g - ускорение свободного падения ;
R - расстояние от рабочей оси установки до измерительной оси акселерометра.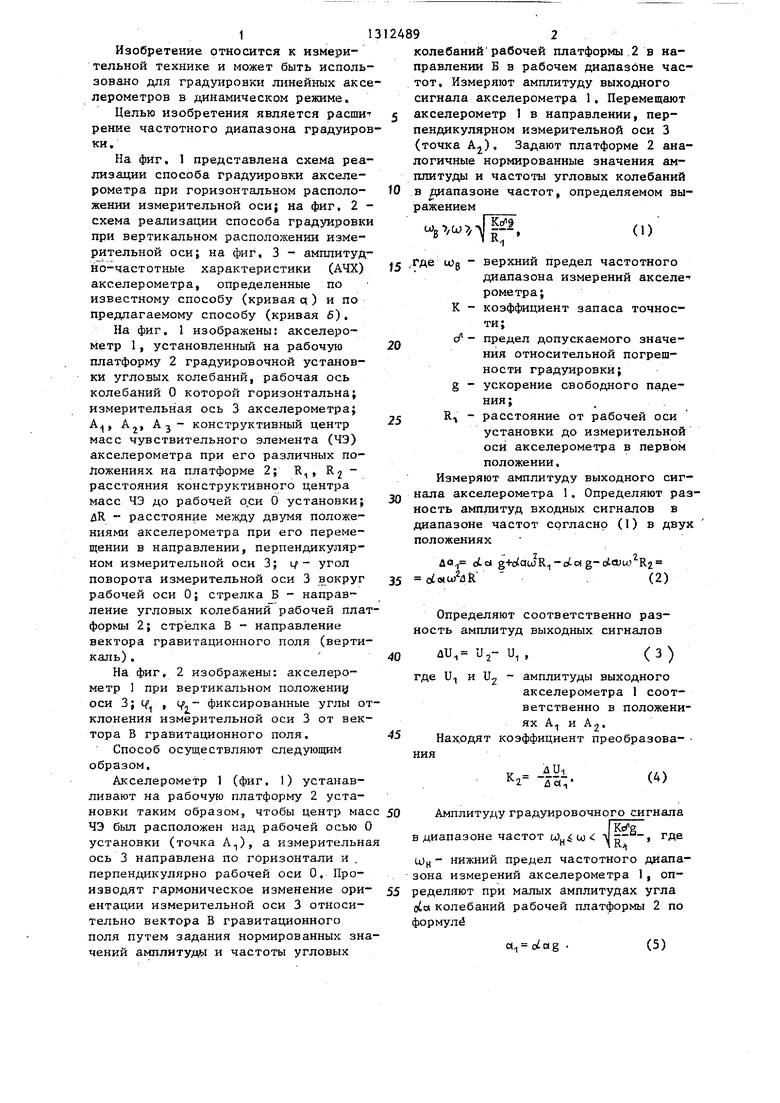

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ градуировки линейных акселерометров | 1986 |
|
SU1345122A1 |
| Способ градуировки линейных акселерометров | 1986 |
|
SU1531000A1 |
| Способ градуировки вертикальных акселерометров | 1988 |
|
SU1569729A1 |
| Способ градуировки низкочастотных линейных акселерометров | 1987 |
|
SU1540494A1 |
| Способ градуировки вертикальных акселерометров | 1989 |
|
SU1742734A1 |
| Способ поверки гравиинерциальных приборов и устройство для его осуществления | 1990 |
|
SU1756844A1 |
| СПОСОБ ГРАДУИРОВКИ ПЪЕЗОЭЛЕКТРИЧЕСКОГО АКСЕЛЕРОМЕТРА НА НИЗКИХ ЧАСТОТАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2519833C2 |
| Способ градуировки акселерометров | 1981 |
|
SU1007024A1 |
| Способ определения амплитудно-частотной характеристики акселерометра | 1984 |
|
SU1163276A1 |
| Низкочастотный стенд для калибровки и испытаний акселерометров и сейсмоприемников | 2019 |
|
RU2757971C2 |
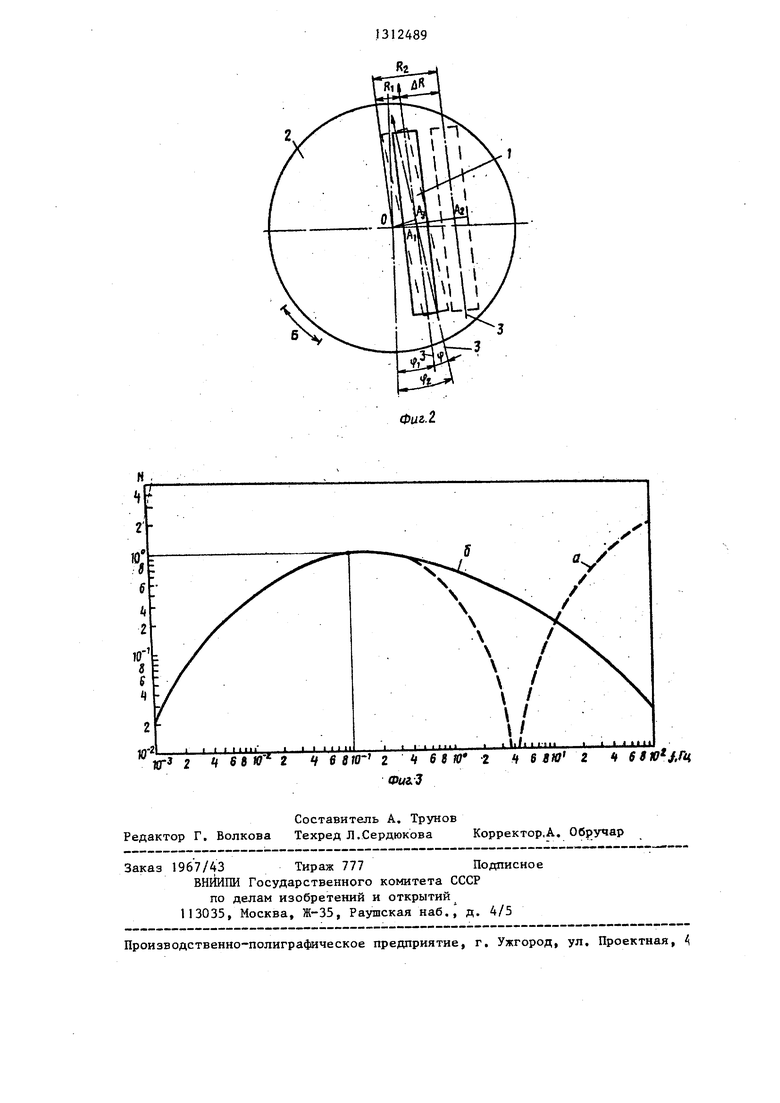
Изобретение относится к измерительной технике. Для расширения частотного диапазона градуировки при установке акселерометра 1 на рабочей платформе 2 центр масс А его чувстви тельного элемента (ЧЭ) располагают вьше горизонтальной плоскости, проходящей через ось О колебаний платформы 2. Осуществляют гармоническое изменение ориентации измерительной оси 3 ЧЭ относительно гравитационного поля, задавая нормированные значения амплитуды и часто.ты угловых колебаний платформы 2, и измеряют амплитуду выходного сигнала. После перемещения акселерометра 1 в направлении, перпендикулярном измерительной оси 3, повторно гармонически изменяют ее ориентацию и измеряют амплитуду выходного сигнала акселерометра. По.разности амплитуд выходных сигналов определяют коэффициент преобразования для фиксированных значений частот. Способ позволяет расширить верхний предел частотного диапазона градуировки от 0,5 до 100 Гц при пределе погрешности, не превышающем 1%. 2 з.п. ф-лы, 3 ил. (Л
И-з 2 Ц ббЮ 2
t 6 810- г Ч S8 Ю -2 Фи&З
Ч 6 ЛЮ 2 t $9Ю.Гц
Составитель А. Трунов Редактор Г. Волкова Техред Л.Сердюкова Корректор,А. Обручар
Заказ 1967/43 Тираж 777Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, i,
| Иориш Ю | |||
| И | |||
| Виброметрия | |||
| М.: ГНТИМЛ с | |||
| ПРОМЕЖУТОЧНАЯ ОПОРА ДЛЯ КАНАТНОГО ТРАНСПОРТЕРА | 1923 |
|
SU630A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
