Изобретение относится к измерительной технике, в частности к методам и средствам аттестации и градуировки низкочастотных вертикальных акселерометров.
Известен способ градуировки, в котором измерительная ось (ИО) градуируемого вертикального акселерометра, установленного на платформу, отклоняется от вертикали на фиксированный угол, и задание входного воздействия акселерометру осуществляется путем гармонических угловых колебаний в вертикальной плоскости его ИО относительно этого положения.
Недостатком этого способа является большая погрешность определения действительного значения фиксированного угла
отклонения ИО акселерометра от вертикали, вызванная погрешностью монтажа акселерометра на платформе и ориентации его ИО относительно базовых элементов крепления, что приводит к большой погрешности задания акселерометру нормированного входного воздействия.
Наиболее близким по технической сущности к предлагаемому является способ rps дуировки вертикальных акселерометров, заключающийся в том, что градуируемый акселерометр устанавливают на платформу с горизонтальной осью вращения, поворачивают акселерометр вокруг оси вращения платформы при гармонических угловых колебаниях до положения, в котором выходfe
х|
СО
ной сигнал акселерометра является гармоникой с двойной частотой угловых колебаний, относительно этого положения производят установку измерительной оси акселерометра на нормированный угол, задают входное нормированное воздействие путем гармонических колебаний платформы и измеряют выходной сигнал акселерометра.
Недостатками известного способа являются низкая точность градуировки акселерометра из-за большой погрешности совмещения измерительной оси с вертикалью и большой погрешности измерения выходного сигнала акселерометра, что вызвано наличием поперечной составляющей в выходном сигнале.
Целью изобретения является повышение точности градуировки путем исключения погрешности от поперечной составляющей.
Указанная цель достигается тем, что при известном способе градуировки вертикальных акселерометров, в котором градуируемый акселерометр устанавливают на платформу с горизонтальной осью вращения, поворачивают акселерометр вокруг оси вращения платформы при гармонических угловых колебаниях до положения, в котором выходной сигнал акселеромета является гармоникой с двойной частотой угловых колебаний, относительно этого положения производят установку измерительной оси акселерометра на нормированный угол, задают входное нормированное воздействие путем гармонических колебаний платформы и измеряют выходной сигнал акселерометр, дополнительно, перед отклонением измерительной оси на нормированный угол, находят второе положение измерительной оси, в котором выходной сигнал акселерометра является гармоникой с двойной частотой угловых колебаний после поворота его на 180° вокруг измерительной оси, устанавливают акселерометр в среднее относи- тельно первого и второго положение измерительной оси, вращают акселерометр в этом положении вокруг измерительной оси до тех пор, пока выходной сигнал не станет гармоникой двойной частоты угловых колебаний, а отклонение измерительной оси на нормированный угол производят уже из этого положения градуируемого акселерометра.
Предлагаемый способ позволяет с высокой точностью совместить НО акселерометра, чувствительного к поперечным виброколебаниям, с вертикалью. Поворот НО акселерометра на нормированный угол уже относительно этого положения позволяет снизить погрешность определения действительного значения нормированного угла установки НО акселерометра относительно вертикали, что, как следствие, повышает точность задания входного сигнала. При предлагаемом способе производится также совмещение оси минимальной поперечной чувствительности градуируемого акселерометра с плоскостью колебаний, в
0 которой осуществляются поперечные воздействия. Тем самым из выходного сигнала акселерометра исключается составляющая, обусловленная ими. Это повышает точность измерения выходного сигнала, что, одно5 временно с повышением точности задания нормированного входного воздействия, приводит к повышению точности определения коэффициента преобразования акселерометра, чем, в совокупности,
0 обеспечивается возможность проведения высокоточной градуировки вертикальных акселерометров.
Сущность предлагаемого способа состоит в том, что на первом этапе градуиров5 ки, перед отклонением измерительной оси на нормированный угол, находят второе положение измерительной оси, в котором выходной сигнал акселерометра является гармоникой с двойной частотой угловых ко0 лебаний после поворота его на 180° вокруг измерительной оси, устанавливают акселерометр в среднее относительно первого и второго положение измерительной оси, вращают акселерометр в этом положении вок5 руг измерительной оси до тех пор, пока выходной сигнал не станет гармоникой частоты угловых колебаний.
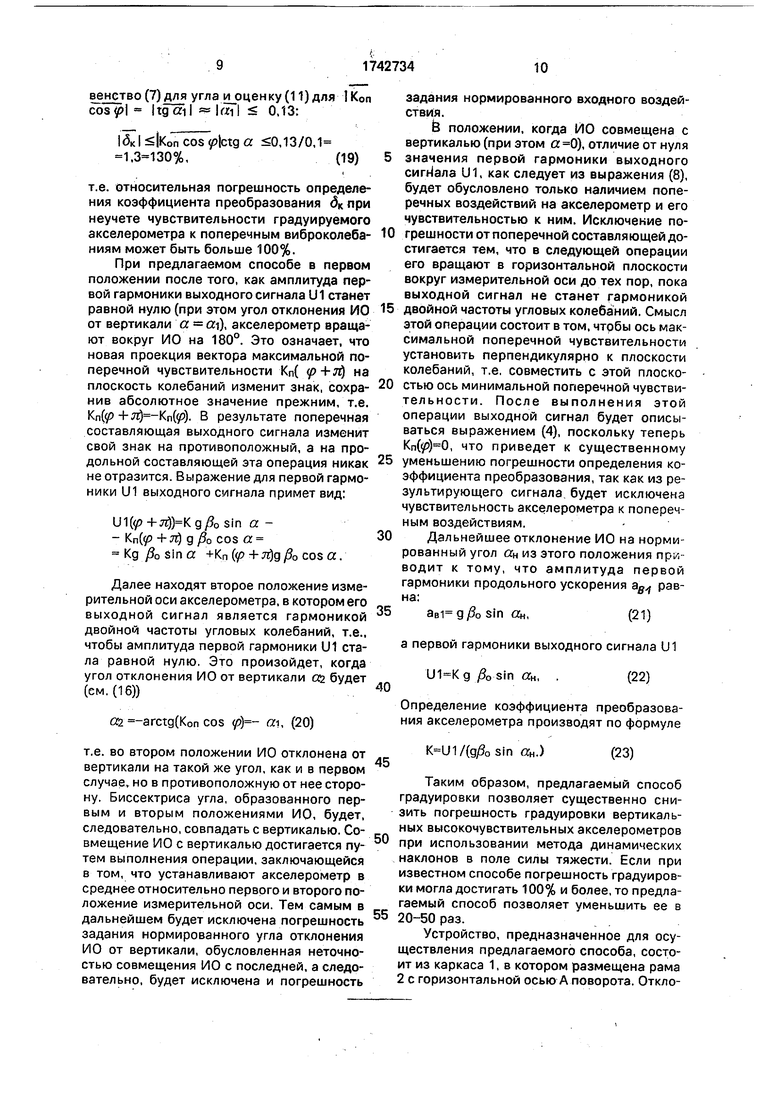
На фиг, 1 показана схема, поясняющая механизм чувствительности акселерометра
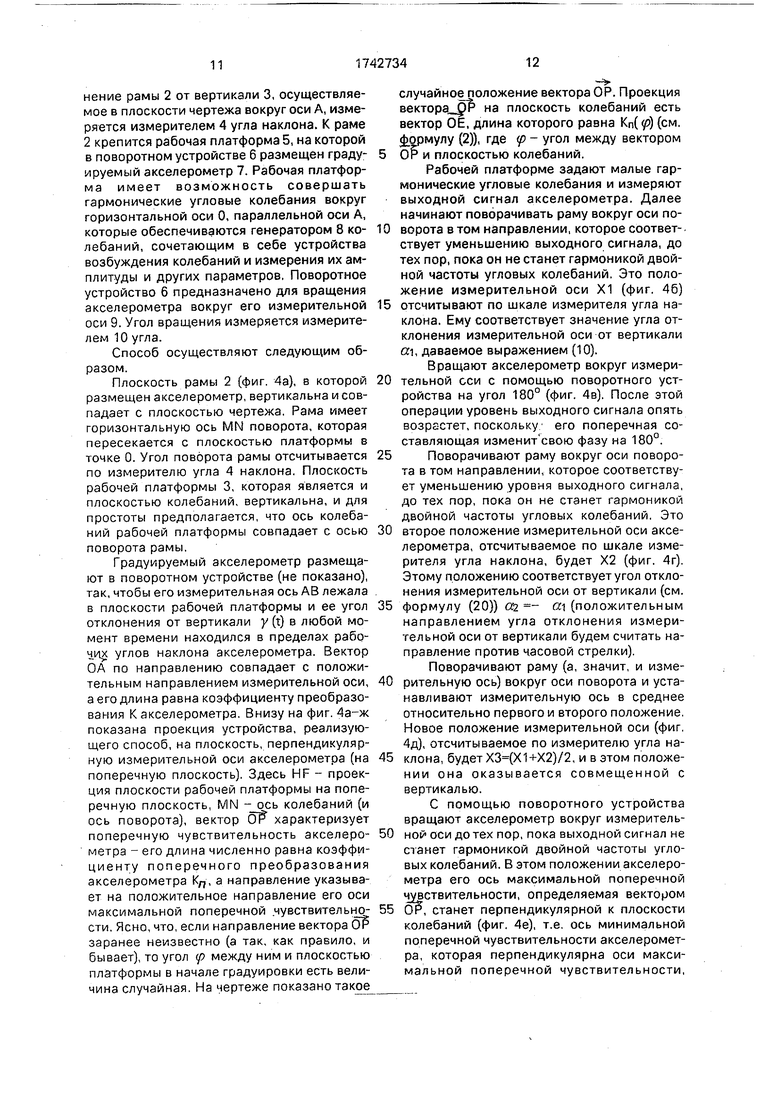
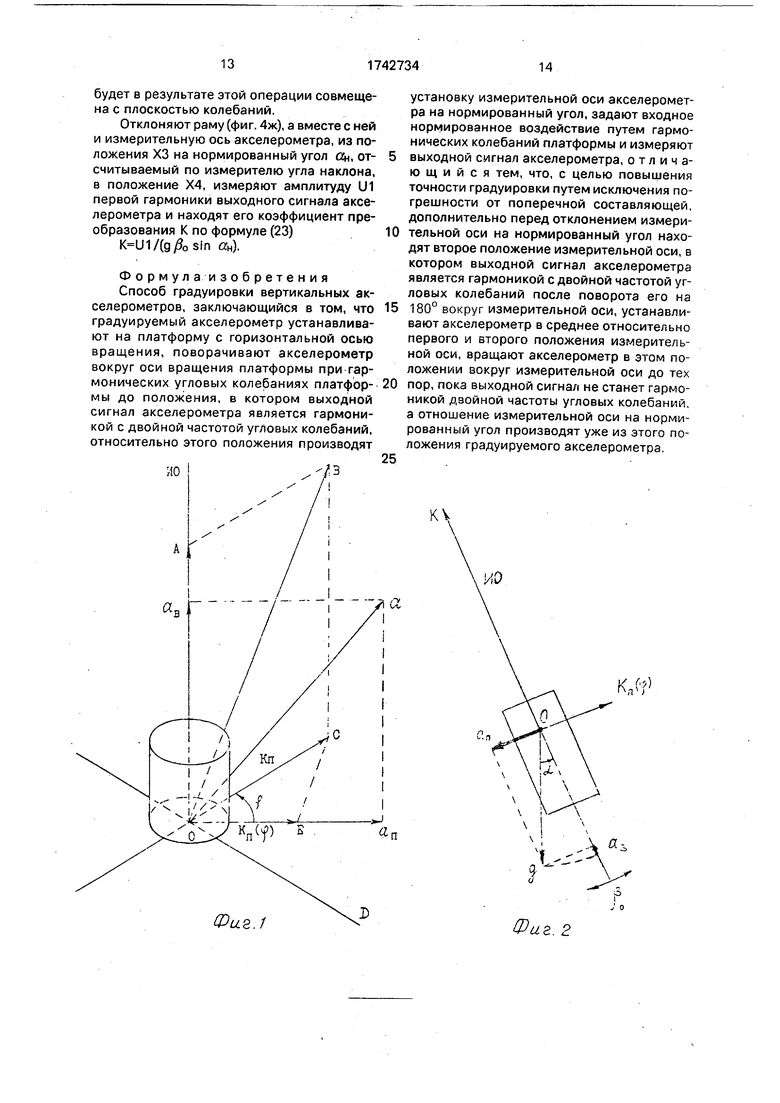
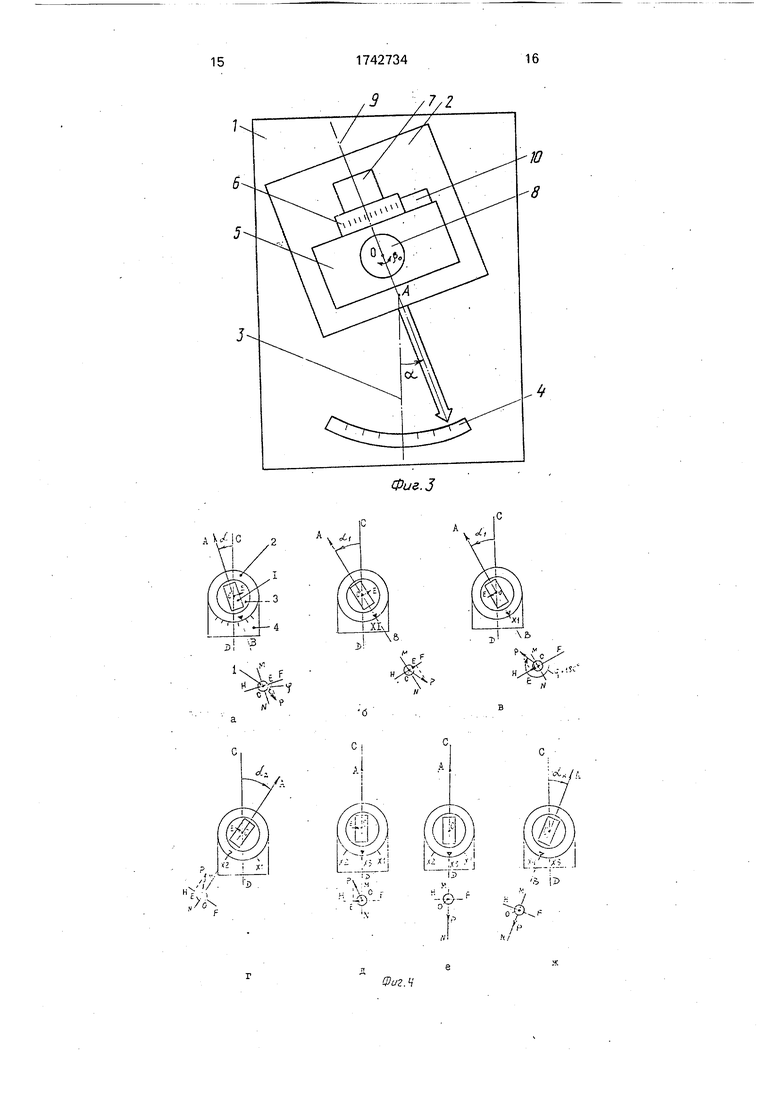
0 к виброколебаниям в поперечных направлениях к его измерительной оси; на фиг. 2 - схема сигналов, воздействующих на акселерометр при градуировке методом динамических наклонов; на фиг. 3 - блок-схема
5 устройства, реализующего предлагаемый способ; на фиг. 4 - последовательность операций при предлагаемом способе.
Как известно, ось максимальной чувствительности акселерометра не совпадает с
0 его измерительной осью. Это объясняется тем, что в реальном акселерометре всегда имеются различные технологические неточности из-за обработки деталей, изготовления чувствительного элемента, посадки .эго
5 в корпусе и др. Поэтому ось максимальной чувствительности акселерометра не совпадает точно с его НО, направление которой определяется корпусом акселерометра, а составляет с ней некоторый угол, который доходит до 10-15°.
На схеме (фиг. 1) вектор О В задает направление оси максимальной чувствительности, Д,его проекцией на Ир является вектор ОА. Проекция вектора Об на плоскость, перпендикулярную ИО (поперечная плоскость), есть вектор ОС (вектор максимальной поперечной ч вствительности). Длины векторов ОА и ОС равны соответственно К и Кп, а их направления выбраны так, что вибрационные воздействия на акселерометр в указанных направлениях вызывают на его выходе положительные сигналы. В поперечной плоскости показана ось OD, перпендикулярная вектору ОС - так называемая ось минимальной поперечной чувствительности, при вибрационном воздействии на акселерометр вдоль которой соответствующий сигнал на его выходе равен нулю.
Таким образом, реальный акселерометр имеет две оси чувствительности - ИО и ось максимальной поперечной чувствительности, вдоль которых он имеет коэффициенты преобразования, соответственно, К и Кп. В общем случае акселерометр подвергается воздействию виброускорения а, направленного под произвольном углом к его ИО (фиг. 1). Произведя разложение вектора а в плоскости, проходящей через ИО и вектор плоскость колебаний, которая совмещена с плоскостью чертежа), получим две составляющие: Эв (продольное ускорение) и ап (поперечное ускорение). Сигнал на выходе акселерометра иа, вызванный поперечным ускорением ап, будет
un Kn an cos (p КП( р) ап,
О)
где р- угол между поперечным ускорением an и осью максимальной поперечной чувствительности; Кп(#) - проекция вектора ОС на плоскость колебаний:
Кп( cos р.
(2)
Поперечный выходной сигнал ип, как следует из (1), зависит от угла f.
Полный выходной сигнал и акселерометра выражается уравнением
и Кав+Кп(у)ап.
(3)
Как видно из фиг. 1, если повернуть акселерометр вокруг ИО на 180°, абсолютная величина проекции Кп() не изменится, однако, поскольку изменится на противоположное ее направление по отношению к направлению вектора поперечных виброколебаний ап, то знак сигнала на выходе аксе0
5
0
5
0
5
0
5
0
5
лерометра также сменится на противоположный, но абсолютное значение его останется прежним.
Если повернуть акселерометр вокруг ОИ так, чтобы ось минимальной поперечной чувствительности OD совместилась с плоскостью колебаний (с направлением поперечного ускорения ап, то поперечная составляющая выходного сигнала акселерометра Un станет равной нулю, и полный выходной сигнал и, как следует из выражения (3), будет иметь вид
. (4)
На схеме (фиг. 2) показан акселерометр с коэффициентом преобразования К и коэффициентом поперечного преобразования Кп, находящийся под действием силы тяжести д, ИО которого составляет с вертикалью угол y(t). В этом случае воздействующие на акселерометр продольное и поперечное ускорение имеют вид ( у (t)) и sin у (т), соответственно, и выходной сигнал акселерометра у, полученный после подстановки в (3) этих выражений, есть
u(t)K g(1-cos у (t))+Kn( р) д sin у (t). (5)
При градуировке предлагаемым способом мгновенный угол отклонения ИО акселерометра от вертикали у (т.) равен
у (т) а +у30 sin со0 t, (6)
где а - нормированный угол отклонения ИО;
и (Оо - амплитуда и круговая частота угловых колебаний ИО соответственно.
Вертикальный акселерометры (акселерометры с вертикальной ориентацией ИО) не допускают больших углов отклонения ИО от вертикали, поэтому значения углов а и Д и при градуировке не могут превышать нескольких градусов. Введем ограничение
,1 рад.(7)
Подставив выражение (6) для мгновенного угла отклоения ИО акселерометра от вертикали y(t) в формулу (5) и учтя ограничения (7), наложенные на значения углов а. и Дэ, получим выражения для амплитуд первой и второй гармоник U i и U2 выходного сигнала акселерометра соответственно
sin a-Kn(f)gfio cos a ; (8)
,25 К g $ cos a +
+ 0,25 Kn(0 g /5o sin a.(9)
Изменяя угол отклонения НО акселерометра от вертикали (при одновременном задании ему угловых колебаний) в направлении, в котором происходит уменьшение амплитуды первой гармоники U1 выходного сигнала, акселерометр приводят в то положение, когда амплитуда первой гармоники U1 равна нулю. При этом амплитуда второй гармоники U2 выходного сигнала, как можно видеть из выражения (9), не равна нулю, т.е. выходной сигнал является гармоникой с двойной частотой угловых колебаний, при этом анализ показывает, что значения амплитуд гармоник более высокого порядка в выходном сигнале при углах а И /30 , значе- ния которыхчограничены неравенством (7), существенно меньше амплитуд первых двух.
Как следует из выражения (В), равенству нулю амплитуды первой гармоники U1 выходного сигнала соответствует угол отклонения ИО от вертикали а
а arctg (K0n cos p,
(10)
где Коп Кп/К- относительный коэффициент поперечного преобразования акселерометра.
Следовательно, если акселерометр чувствителен к поперечным виброколебаниям, то, когда проекция вектора максимальной поперечной чувствительности на плоскость колебаний Кп( р) не равна нулю, что практически всего имеет место в действительности, приведенная выше последовательность операций в известном акселерометре не позволяет совместить его ИО с вертикалью.
Оценим возможное значение абсолютной величины угла несовмещения ИО с вертикалью |ail.
Относительный коэффициент поперечного преобразования К0п для акселерометров может достигать значения 0,2, Предположим, что р- случайная величина, равномерно распределенная на отрезке 0,2 7t. Среднее значение модуля косинуса угла рв этом случае равно
Icos (f 2/л 0,64.
Тогда из (10) получим, что среднее значение модуля угла а может достигать (учитывая малость Коп) следующего значения:
,2 0,,13 рад 7,3°. (11)
При отклонении ИО из этого положения на нормированный угол а расчетное значение первой гармоники продольного ускорения Эв1 будет
PO sin a.
(12)
Действительный угол отклонения ИО от вертикали а есть
а ан + (Xi
(13)
и ему соответствует действительное значение первой гармоники продольного ускорения aBi:
Д sin а д sin(«H + «1). (14)
Таким образом, методическая погрешность задания первой гармоники продольного ускорения Дав1 (с учетом малости углов «и/Зо) равна
Лав1 аВ1-ав1 д ее /30 cos« .
(15)
При способе градуировки вертикальных акселерометров, в котором используется ускорение силы тяжести, на акселерометр воздействует как продольное, так и поперечное ускорение, что, ввиду его чувствительности как к первому, так и к второму, приводит к появлению в его выходном сигнале продольной и поперечной составляющих (см. выражение (3) для выходного сигнала).
После отклонения ИО акселерометра от вертикали на угол а измеряют амплитуду первой гармоники выходного сигнала U1 и определяют расчетный коэффициент преобразования акселерометра К по формуле
K U1/aBi U1/(g «)
(16)
Более полная модель, описывающая входное воздействие на акселерометр и учитывающая чувствительность последнего к поперечным вибрациям, приводит к выражению (8) для первой гармоники его выходного сигнала. Подставив в (16) формулу (8), получим выражение для значения расчетного коэффициента преобразования К
(1-КОП cos ipctg a.
(17)
Из этого выражения следует, что относит ,;льная погрешность определения коэффициента преобразования дк, из-за неучета чувствительности акселерометра к поперечным воздействиям,равна
55
дк Коп cos p ctg a ,
(18)
Получим оценку для предела среднего значения погрешности, учитывая неравенство (7) для угла и оценку (11) для К0п cospl Itgail l«il 0,13:
| 5K| |Ko cosp|ctga 0,13/0,1 1,,(19)
т.е. относительная погрешность определения коэффициента преобразования дк при неучете чувствительности градуируемого акселерометра к поперечным виброколебаниям может быть больше 100%.
При предлагаемом способе в первом положении после того, как амплитуда первой гармоники выходного сигнала U1 станет равной нулю (при этом угол отклонения ИО от вертикали a ai), акселерометр вращают вокруг ИО на 180°. Это означает, что новая проекция вектора максимальной поперечной чувствительности Кп( +л) на плоскость колебаний изменит знак, сохранив абсолютное значение прежним, т.е. Кп(р + л)-Кп(#). В результате поперечная составляющая выходного сигнала изменит свой знак на противоположный, а на продольной составляющей эта операция никак не отразится. Выражение для первой гармоники U1 выходного сигнала примет вид:
U%+;rc)) a - Кп(р +rt) g fa cos a
Kg sin а +КП (р + л)д j30 cos a.
Далее находят второе положение измерительной оси акселерометра, в котором его выходной сигнал является гармоникой двойной частоты угловых колебаний, т.е., чтобы амплитуда первой гармоники U1 стала равной нулю. Это произойдет, когда угол отклонения ИО от вертикали аи будет (ем. (16))
аг -arctg(Kon cos p)- «i, (20)
«
10
15
20
25
30
35
задания нормированного входного воздействия.
В положении, когда ИО совмещена с вертикалью (при этом ), отличие от нуля значения первой гармоники выходного сигйала U1, как следует из выражения (8), будет обусловлено только наличием поперечных воздействий на акселерометр и его чувствительностью к ним. Исключение погрешности от поперечной составляющей достигается тем, что в следующей операции его вращают в горизонтальной плоскости вокруг измерительной оси до тех пор, пока выходной сигнал не станет гармоникой двойной частоты угловых колебаний. Смысл этой операции состоит в том, чтобы ось максимальной поперечной чувствительности установить перпендикулярно к плоскости колебаний, т.е, совместить с этой плоскостью ось минимальной поперечной чувстви- тельности. После выполнения этой операции выходной сигнал будет описываться выражением (4), поскольку теперь Кп($)0, что приведет к существенному уменьшению погрешности определения коэффициента преобразования, так как из результирующего сигнала будет исключена чувствительность акселерометра к поперечным воздействиям.
Дальнейшее отклонение ИО на нормированный угол ссн из этого положения при водит к тому, что амплитуда первой гармоники продольного ускорения ав равна:
OH,(21)
а первой гармоники выходного сигнала U1
40
U1-Kg a,
(22)
Определение коэффициента преобразования акселерометра производят по формуле
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ градуировки линейных акселерометров | 1986 |
|
SU1345122A1 |
| Способ градуировки вертикальных акселерометров | 1988 |
|
SU1569729A1 |
| Способ градуировки линейных акселерометров | 1984 |
|
SU1312489A1 |
| Способ градуировки линейных акселерометров | 1986 |
|
SU1531000A1 |
| Способ градуировки низкочастотных линейных акселерометров | 1987 |
|
SU1540494A1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2017 |
|
RU2669263C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2015 |
|
RU2602736C1 |
| СПОСОБ ДИСТАНЦИОННОЙ КАЛИБРОВКИ АКСЕЛЕРОМЕТРА В СОСТАВЕ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2272299C1 |
| УСТРОЙСТВО ДЛЯ ГРАДУИРОВКИ СРЕДСТВ ИЗМЕРЕНИЙ УГЛОВЫХ ПАРАМЕТРОВ ДВИЖЕНИЯ | 1992 |
|
RU2010236C1 |
| Способ оценки качества удержания вертикального положения | 2023 |
|
RU2833267C1 |
Использование: в измерительной технике, в частности в методах и средствах аттестации и градуировки низкочастотных вертикальных акселерометров. Сущность изобретения: градуированный акселерометр устанавливают на платформе, поворачивают вокруг оси вращения платформы при гармонических угловых колебаниях платформы до положения, в котором выходной сигнал акселерометра является гармоникой с двойной частотой угловых колебаний, повторяют указанные операции после поворота акселерометра на 180° вокруг измерительной оси, устанавливают акселерометр в среднее относительно первого и второго положения измерительной оси, вращают при этом акселерометр вокруг измерительной оси до тех пор, пока выходной сигнал не станет гармоникой двойной частоты угловых колебаний, относительно этого положения производят установку измерительной оси акселерометра на нормированный угол, задают входное нормированное воздействие путем гармонических колебаний платформы и измеряют выходной сигнал акселерометра. 4 ил. сл с
т.е. во втором положении ИО отклонена от вертикали на такой же угол, как и в первом случае, но в противоположную от нее сторону. Биссектриса угла, образованного первым и вторым положениями ИО, будет, следовательно, совпадать с вертикалью. Совмещение ИО с вертикалью достигается путем выполнения операции, заключающейся в том, что устанавливают акселерометр в среднее относительно первого и второго положение измерительной оси. Тем самым в дальнейшем будет исключена погрешность задания нормированного угла отклонения ИО от вертикали, обусловленная неточностью совмещения ИО с последней, а следовательно, будет исключена и погрешность
45
(g#,sin Он.)
(23)
0
5
Таким образом, предлагаемый способ градуировки позволяет существенно снизить погрешность градуировки вертикальных высокочувствительных акселерометров при использовании метода динамических наклонов в поле силы тяжести. Если при известном способе погрешность градуировки могла достигать 100% и более, то предлагаемый способ позволяет уменьшить ее в 20-50 раз.
Устройство, предназначенное для осуществления предлагаемого способа, состоит из каркаса 1, в котором размещена рама 2 с горизонтальной осью А поворота, Отклонение рамы 2 от вертикали 3, осуществляемое в плоскости чертежа вокруг оси А, измеряется измерителем 4 угла наклона. К раме 2 крепится рабочая платформа 5, на которой в поворотном устройстве 6 размещен граду- ируемый акселерометр 7. Рабочая платформа имеет возможность совершать гармонические угловые колебания вокруг горизонтальной оси 0, параллельной оси А, которые обеспечиваются генератором 8 ко- лебаний, сочетающим в себе устройства возбуждения колебаний и измерения их амплитуды и других параметров, Поворотное устройство 6 предназначено для вращения акселерометра вокруг его измерительной оси 9. Угол вращения измеряется измерителем 10 угла.
Способ осуществляют следующим образом.
Плоскость рамы 2 (фиг. 4а), в которой размещен акселерометр, вертикальна и совпадает с плоскостью чертежа. Рама имеет горизонтальную ось MN поворота, которая пересекается с плоскостью платформы в точке 0. Угол поворота рамы отсчитывается по измерителю угла 4 наклона. Плоскость рабочей платформы 3, которая является и плоскостью колебаний, вертикальна, и для простоты предполагается, что ось колебаний рабочей платформы совпадает с осью поворота рамы.
Градуируемый акселерометр размещают в поворотном устройстве (не показано), так, чтобы его измерительная ось АВ лежала в плоскости рабочей платформы и ее угол отклонения от вертикали у (t) в любой момент времени находился в пределах рабочих углов наклона акселерометра. Вектор ОА по направлению совпадает с положительным направлением измерительной оси, а его длина равна коэффициенту преобразования К акселерометра. Внизу на фиг. 4а-ж показана проекция устройства, реализующего способ, на плоскость, перпендикулярную измерительной оси акселерометра (на поперечную плоскость). Здесь HF - проекция плоскости рабочей платформы на поперечную плоскость, MN - ось колебаний (и ось поворота), вектор 0 характеризует поперечную чувствительность акселеро- метра - его длина численно равна коэффициенту поперечного преобразования акселерометра Кл, а направление указывает на положительное направление его оси максимальной поперечной чувствительно- сти. Ясно, что, если направление вектора ОР заранее неизвестно (а так, как правило, и бывает), то угол р между ним и плоскостью платформы в начале градуировки есть величина случайная. На чертеже показано такое
случайное положение вектора ОР. Проекция вектора рР на плоскость колебаний есть вектор ОЕ, длина которого равна Кп(#) (см. формулу (2)), где р - угол между вектором ОР и плоскостью колебаний.
Рабочей платформе задают малые гармонические угловые колебания и измеряют выходной сигнал акселерометра. Далее начинают поворачивать раму вокруг оси поворота втом направлении, которое соответствует уменьшению выходного сигнала, до тех пор, пока он не станет гармоникой двойной частоты угловых колебаний. Это положение измерительной оси Х1 (фиг. 46) отсчитывают по шкале измерителя угла наклона. Ему соответствует значение угла отклонения измерительной оси от вертикали «1, даваемое выражением (10).
Вращают акселерометр вокруг измерительной оси с помощью поворотного устройства на угол 180° (фиг. 4в). После этой операции уровень выходного сигнала опять возрастет, поскольку его поперечная составляющая изменит свою фазу на 180°.
Поворачивают раму вокруг оси поворота в том направлении, которое соответствует уменьшению уровня выходного сигнала, до тех пор, пока он не станет гармоникой двойной частоты угловых колебаний. Это второе положение измерительной оси акселерометра, отсчитываемое по шкале измерителя угла наклона, будет Х2 (фиг. 4г). Этому положению соответствует угол отклонения измерительной оси от вертикали (см. формулу (20)) «2 - «1 (положительным направлением угла отклонения измерительной оси от вертикали будем считать направление против часовой стрелки).
Поворачивают раму (а, значит, и измерительную ось) вокруг оси поворота и устанавливают измерительную ось в среднее относительно первого и второго положение. Новое положение измерительной оси (фиг. 4д), отсчитываемое по измерителю угла наклона, будет ХЗ(Х1+Х2)/2, и в этом положении она оказывается совмещенной с вертикалью.
С помощью поворотного устройства вращают акселерометр вокруг измерительной оси до тех пор, пока выходной сигнал не станет гармоникой двойной частоты угловых колебаний. В этом положении акселерометра его ось максимальной поперечной чувствительности, определяемая вектором ОР, станет перпендикулярной к плоскости колебаний (фиг. 4е), т.е. ось минимальной поперечной чувствительности акселерометра, которая перпендикулярна оси максимальной поперечной чувствительности,
будет в результате этой операции совмещена с плоскостью колебаний.
Отклоняют раму (фиг. 4ж), а вместе с ней и измерительную ось акселерометра, из положения ХЗ на нормированный угол Он, отсчитываемый по измерителю угла наклона, в положение Х4, измеряют амплитуду U1 первой гармоники выходного сигнала акселерометра и находят его коэффициент преобразования К по формуле (23)
( OH).
Формула изобретения Способ градуировки вертикальных акселерометров, заключающийся в том, что градуируемый акселерометр устанавливают на платформу с горизонтальной осью вращения, поворачивают акселерометр вокруг оси вращения платформы при гармонических угловых колебаниях платформы до положения, в котором выходной сигнал акселерометра является гармоникой с двойной частотой угловых колебаний, относительно этого положения производят
ИО
Фи.г.1
установку измерительной оси акселерометра на нормированный угол, задают входное нормированное воздействие путем гармонических колебаний платформы и измеряют
выходной сигнал акселерометра, отличающийся тем, что, с целью повышения точности градуировки путем исключения погрешности от поперечной составляющей, дополнительно перед отклонением измерительной оси на нормированный угол находят второе положение измерительной оси, в котором выходной сигнал акселерометра является гармоникой с двойной частотой угловых колебаний после поворота его на
180° вокруг измерительной оси, устанавливают акселерометр в среднее относительно первого и второго положения измерительной оси, вращают акселерометр в этом положении вокруг измерительной оси до тех
пор, пока выходной сигнал не станет гармоникой двойной частоты угловых колебаний, а отношение измерительной оси на нормированный угол производят уже из этого положения градуируемого акселерометра.
Фаг. 2
15
А ч «Ј
ч
Л л
-- %°Фиг.З
С|
А
-о0
| Устройство для воспроизведения постоянных и низкочастотных гармонических линейных ускорений | 1978 |
|
SU731383A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ градуировки линейных акселерометров | 1986 |
|
SU1345122A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
