Изобретение относится к контрольно-измерительной технике и может найти применение при контроле погрешностей электромашинных преобразователей угла.
Целью изобретения является повышение точности, быстродействия устройства и повышение уровня автоматизации процесса контроля.
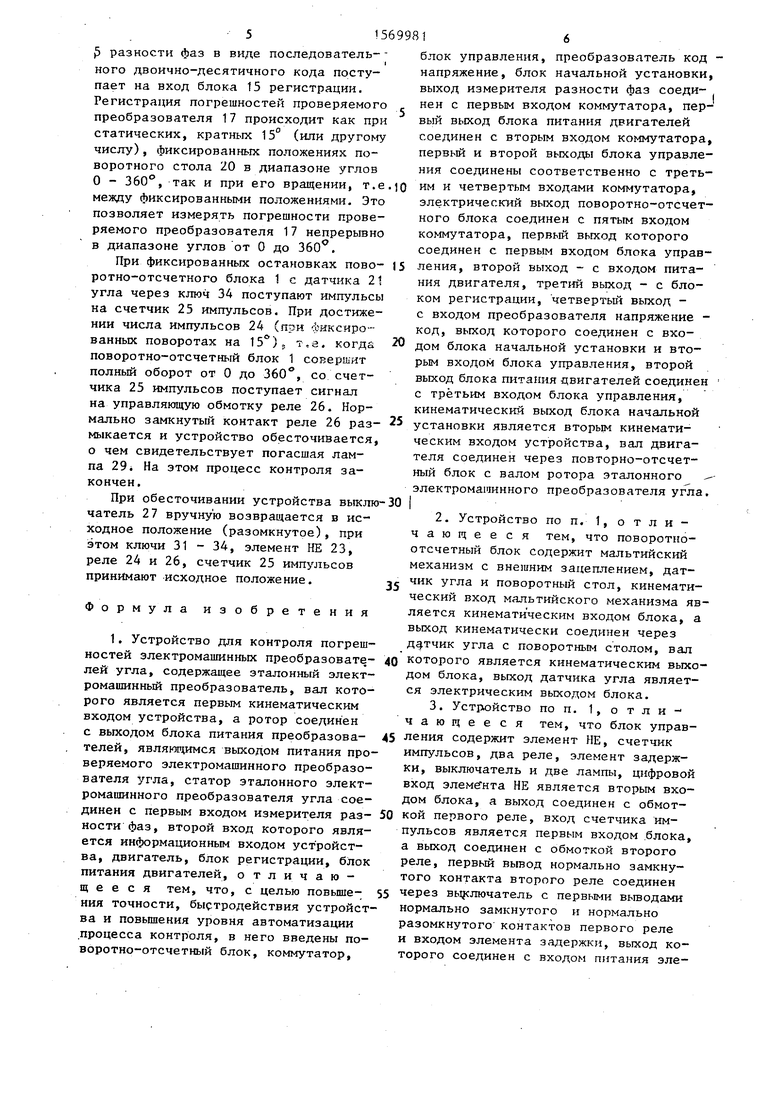
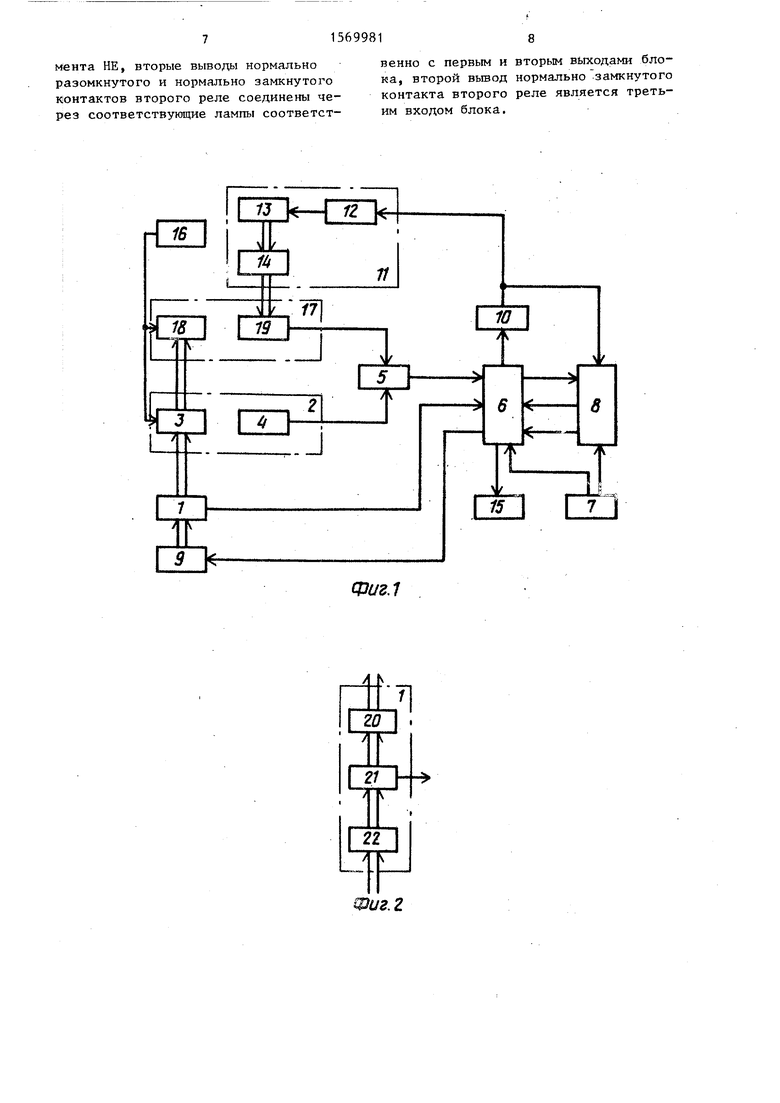
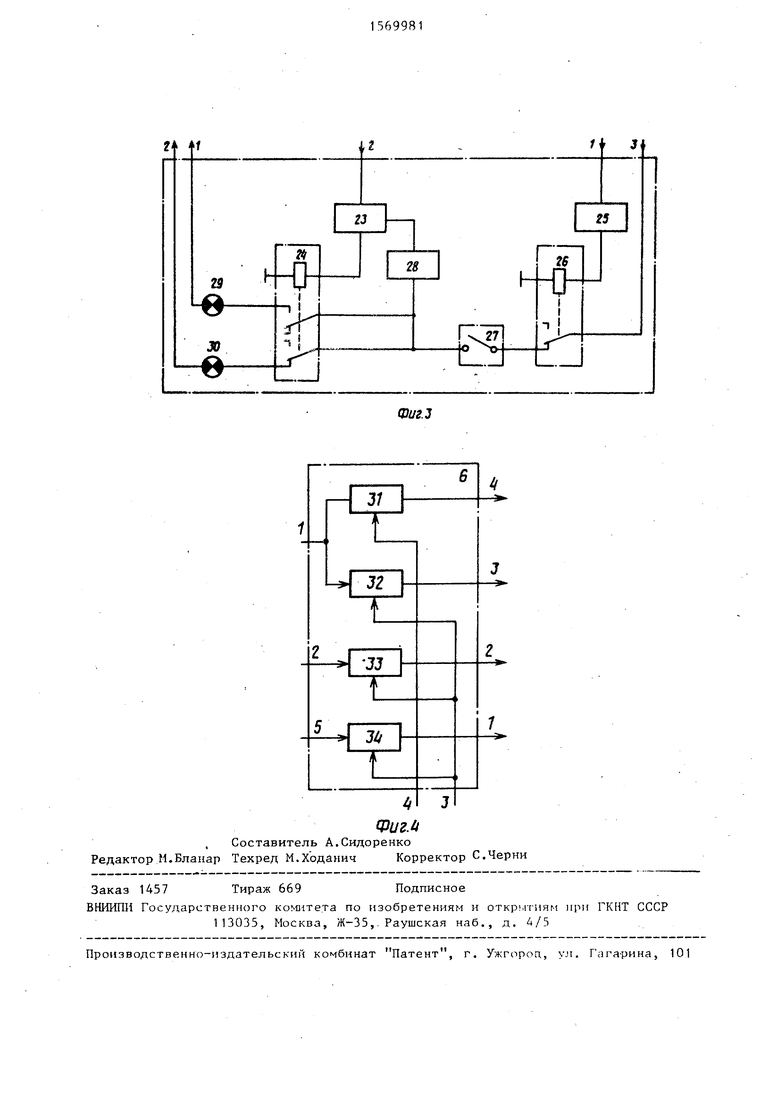
На фиг. 1 приведена структурная схема устройства для контроля погрешностей электромагаинных преобразователей угла; ка фиг. 2 - структурная схема поворотно-отсчетного блока; на фиг.З - структурная схема блока управления; на фиг.4 - структурная схема коммутатора.
Устройство для контроля погрешностей электромашинных преобразователей угла содержит поворотно-отсчетный блок 1, эталонный электромашинный преобразователь 2 угла, содержаний ротор 3 и статор 4, измеритель 5 разности фаз, коммутатор 6, блок 7 питания двигателя, блок 8 управления, двигатель 9, преобразователь 10 код ел
с&
СО
со
00
напряжения, блок 11 начальной установки, выполненный в виде усилителя .12, двигателя 13 и редуктора 14S блок 15 регистрации, блок 16 питания преобразователей. Проверяемый электромашинный преобразователь 17 угла содержит ротор 18 и статор 19. Поворот- но-отсчетный блок 1 содержит поворотный стол 20, датчик 21 угла и мальтийский механизм 22 с внешним зацеплением. Блок 8 управления содержит элемент НЕ 23, реле 24, счетчик 25 импульсов, реле 26, выключатель 27, элемент 28 задержки, рампы 29 и 30. Коммутатор 6 содержит ключи 31 - 34.
Устройство для контроля погрешностей электромашинных преобразователей угла работает следующим образом.
Проверяемый электромашинный преобразователь 17 угла, произвольно ориентированный, устанавливается в гнездо на валу поворотно-отсчетного блока 1 так, что его ротор 18, ротор 3 образцового преобразователя 2 угла и вал поворотно-отсчетного блока 1 оказываются механически соединенными . После подключения разъемов электрических цепей процесс контроля погрешностей осуществляется в два этапа: начальная установка статора 19 проверяемого электромашинного преобразователя 17 угла и непосредственно контроль.
При включении выключателя 27 блока 8 управления с выхода блока 7 питания двигателей через нормально замкнутые контакты реле 26 и 24 и лампу 30 электрический сигнал поступает на управляющий вход ключа 31 (фиг.4) и замыкает его. Выходной сигнал с измерителя 5 разности фаз, пропорциональный углу начального рассогласования между эталонным преобразователем 2 и проверяемым преобразователем 17, в виде последовательного двоично-десятичного кода через ключ 31 поступает на вход преобразователя 10 код - напряжение. С выхода преобразователя 10 аналоговый сигнал поступает на вход усилителя 12 блока 11 начальной установки и на вход элемента НЕ 23 блока 8 управления.
При включении выключателя 27 электрический сигнал через элемент 28 задержки поступает на вход питания элемента НЕ 23, элемент 28 задержки задерживает проход электрического сигнала на вход питания элемента НЕ 23 на время большее, чем время прихода
0
0
5
0
5
0
5
0
5
электрического сигнала с преобразователя 10 код - напряжение на вход элемента НЕ 23. Это необходимо для устранения сбоев в работе элемента НЕ 23.
Сигнал рассогласования с выхода усилителя 12 поступает на двигатель 13, который через редуктор 14 поворачивает статор 19 проверяемого преоб- . разователя 17 до тех пор, пока электрический сигнал на выходе измерителя 5 разности фаз не равен нулю, т.е. обмотки эталонного преобразователя 2 и проверяемого преобразователя 17 не примут согласованного положения. На этом этап начальной установки заканчивается. Переход к процессу контроля происходит автоматически.
При нулев ом сигнале на выходе преобразователя 10 код - напряжение срабатывает элемент НЕ 23 и электрический сигнал поступает на управляющую обмотку реле 24. После срабатывания реле 24 замыкается его нормально разомкнутый контакт и размыкается нормально замкнутый контакт, при этом управляющий вход ключа 31 обесточивается, а на управляющие входы ключей 32 - 34 поступает электрический сигнал. О переключении цепей сигнализируют лампы 29. и 30: лампа 30 загорается, лампа 29 гаснет.
Ключ 32 замыкает цепь между выходом измерителя 5 разности фаз и входом блока 15 регистрации. Ключ 33 замыкает цепь между выходом блока 7 питания двигателей и приводным двигателем 9. Ключ 34 замыкает цепь между датчиком 21 угла поворотно-отсчетного блока 1 и счетчиком 25 импульсов.
После подключения двигателя 9, механически связанного с мальтийским механизмом 22, поворотно-отсчетный блок 1 осуществляет фиксированные дискретные повороты через 15° в диапазоне углов от 0 до 360°, т.е. устанавливает роторы 3 и 18 преобразователей 2 и 18 в 24 фиксированные положения (число фиксированных положений может быть и другим). В неподвижных обмотках статоров 4 и 19 преобразователей 2 и 17 наводятся электрические сигналы, пропорциональные углу поворота, и поступают на различные входы измерителя 5 разности фаз, с выхода которого снимается сигнал, пропорциональный погрешности проверяемого преобразователя 17. Через ключ 32 сигнал погрешности с ньтхоаа измерителя
5 разности фаз в виде последователь- - ного двоично-десятичного кода поступает на вход блока 15 регистрации. Регистрация погрешностей проверяемого преобразователя 17 происходит как при статических, кратных 15° (или другому числу), фиксированных положениях поворотного стола 20 в диапазоне углов О - 360°, так и при его вращении, т.е между фиксированными положениями. Это позволяет измерять погрешности проверяемого преобразователя 17 непрерывно в диапазоне углов от 0 до 360°.
При фиксированных остановках пово- ротно-отсчетного блока 1 с датчика 21 угла через ключ 34 поступают импульсы на счетчик 25 импульсов. При достижении числа импульсов 24 (при Фиксированных поворотах на 15°)s . когда поворотно-отсчетный блок 1 совершит полный оборот от 0 до 360°, со счет
чика 25 импульсов поступает сигнал на управляющую обмотку реле 26. Нормально замкнутый контакт реле 26 раз- мыкается и устройство обесточивается, о чем свидетельствует погасшая лампа 29. На этом процесс контроля закончен.
При обесточивании устройства выклю чатель 27 вручную возвращается в исходное положение (разомкнутое), при этом ключи 31 - 34, элемент НЕ 23, реле 24 и 26, счетчик 25 импульсов принимают исходное положение.
Формула изобретени
1. Устройство для контроля погрешностей электромашинных преобразовате- лей угла, содержащее эталонный электромашинный преобразователь, вал которого является первым кинематическим входом устройства, а ротор соединен с выходом блока питания преобразователей, являющимся выходом питания проверяемого электромашинного преобразователя угла, статор эталонного электромашинного преобразователя угла соединен с первым входом измерителя разности фаз, второй вход которого является информационным входом устройства, двигатель, блок регистрации, блок питания двигателей, отличающееся тем, что, с целью повыше- ния точности, быстродействия устройства и повышения уровня автоматизации .процесса контроля, в него введены поворотно-отсчетный блок, коммутатор,
10
- о и е о о
- 15 1 25,
5699816
блок управления, преобразователь код - напряжение, блок начальной установки, выход измерителя разности фаз соеди- нен с первым входом коммутатора, первый выход блока питания двигателей соединен с вторым входом коммутатора, первый и второй выходы блока управления соединены соответственно с третьим и четвертым входами коммутатора, электрический выход поворотно-отсчет- ного блока соединен с пятым входом коммутатора, первый выход которого соединен с первым входом блока управления, второй выход - с входом питания двигателя, третий выход - с блоком регистрации, четвертый выход - с входом преобразователя напряжение - код, выход которого соединен с входом блока начальной установки и вторым входом блока управления, второй выход блока питания двигателей соединен с третьим входом блока управления, кинематический выход блока начальной установки является вторым кинематическим входом устройства, вал двигателя соединен через повторно-отсчет- ный блок с валом ротора эталонного -- электромашинного преобразователя угла.
20
2. Устройство по п. отличающееся тем, что поворотно- отсчетный блок содержит мальтийский механизм с внешним зацеплением, дат- чик угла и поворотный стол, кинемати
ческий вход мальтийского механизма является кинематическим входом блока, а выход кинематически соединен через датчик угла с поворотным столом, вал которого является кинематическим выходом блока, выход датчика угла является электрическим выходом блока.
3. Устройство по п. 1, о т л и - чающееся тем, что блок управ- ления содержит элемент НЕ, счетчик импульсов, два реле, элемент задержки, выключатель и две лампы, цифровой вход элемента НЕ является вторым входом блока, а выход соединен с обмоткой первого реле, вход счетчика импульсов является первым входом блока, а выход соединен с обмоткой второго
реле, первый вывод нормально замкнутого контакта второго реле соединен через вьцопочатель с первыми выводами нормально замкнутого и нормально разомкнутого контактов первого реле и входом элемента задержки, выход которого соединен с входом питания элемента НЕ, вторые выводы нормальновенно с первым и вторым выходами бло- разомкнутого и нормально замкнутогока, второй вывод нормально замкнутого контактов второго реле соединены че-контакта второго реле является треть- рез соответствующие лампы соответст-им входом блока.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля электрических машин | 1975 |
|
SU532871A1 |
| Устройство для проверки преобразователей угол-код | 1976 |
|
SU743005A1 |
| Устройство для контроля электрических параметров полупроводниковых диодов | 1983 |
|
SU1138768A1 |
| Устройство автоматизированного контроля параметров реле | 1980 |
|
SU918936A1 |
| Устройство для контроля электрических машин | 1976 |
|
SU633058A1 |
| Измеритель относительной нелинейности амплитудных характеристик | 1978 |
|
SU720377A1 |
| Устройство для проверки синусно-косинусных вращающихся трансформаторов | 1980 |
|
SU924738A1 |
| Способ контроля глубины упрочненного слоя ферромагнитных изделий и устройство для его осуществления | 1985 |
|
SU1272210A1 |
| Весы с электромагнитным уравновешиванием | 1982 |
|
SU1046619A1 |
| Устройство для измерения тепловых потерь в вентильных полупроводниковых приборах | 1989 |
|
SU1775677A1 |
Изобретение относится к контрольно-измерительной технике и может найти применение при контроле погрешностей электромашинных преобразователей угла. Целью изобретения является повышение точности, быстродействия устройства и повышение уровня автоматизации процесса контроля. Для этого в устройство для контроля погрешностей электромашинных преобразователей угла, содержащее эталонный электромашинный преобразователь угла, измеритель разности фаз, блок питания преобразователей, двигатель разности фаз, двигатель, блок регистрации, блок питания двигателей, введены поворотно-отсчетный блок, коммутатор, блок управления, преобразователь код - напряжения и блок начальной установки. Работа устройства организована в два этапа: начального совмещения проверяемого электромашинного преобразователя угла с эталонным электромашинным преобразователем угла и измерения погрешности проверяемого электромашинного преобразователя угла. 2 з.п. ф-лы, 4 ил.
Фиг.1
LSJr+
22|
1
Фиг. г
4 J ФигМ
Составитель А.Сидоренко Редактор М.Бланар Техред М.Ходанич Корректор С.Черни
Заказ 1457 Тираж 669Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. А/5
| -Кривенков В.В | |||
| Автоматический контроль и проверка преобразователей угловых и линейных величин | |||
| - Л.: Машиностроение | |||
| Ленингр | |||
| отд-ние, 1986, с | |||
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU105A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, рис | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
