1
Изобретение относится к области электротехники и электроизмерительной техники.
Известны устройства для автоматического контроля параметров электрических переменного тока, содержащие проверяемый вращающийся трансформатор, измеритель отношения напряжений, датчик угла, запоминающее и арифметическое устройства.
Контролируемый вращающийся трансформатор последовательно устанавливается на углы, заданные датчиком угла. При установке вращающегося трансформатора на угол измеряется отношение выходного напряжения вращающегося трансформатора к входному и в арифметическом устройстве определяется погрещность вращающегося трансформатора на каждом углу путем сравнения измеренного отношения со значением синуса этого угла, поступающего в арифметическое устройство из запоминающего устройства.
Недостатком этого устройства является наличие погрешности, вносимой в результаты измерений иэ-за отсутствия измерений фазового сдвига выходного напряжения контролируемой машины, что видно, например, из формулы для определения погрешности отображения синусной зависимости вращающегося трансформатора
юо%
E(K. cos Ay--sinct. )
где К . отношение выходного напряжения
I ВТ в входному;
A iизменение сдвига фаз между этими напряжениями при повороте ротора ВТ на угол d.j.
В устройстве дУ не измеряется, а при расчете погрешности 8 принимается со& лУ:
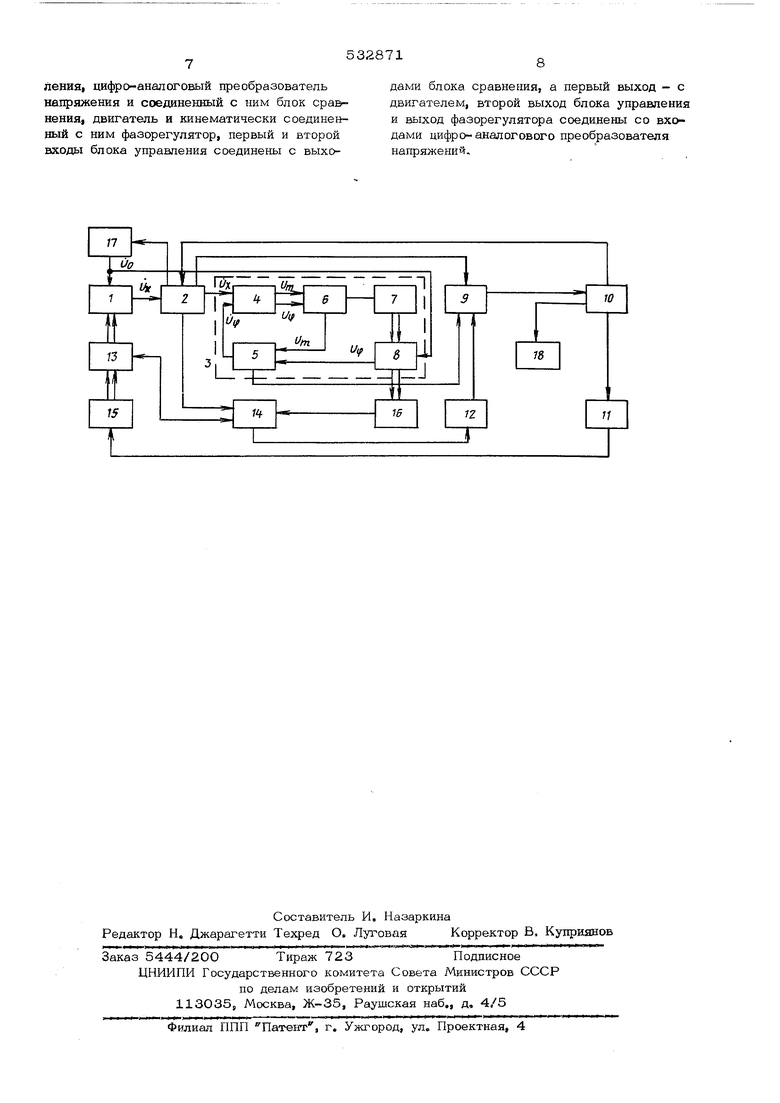
Наиболее близким техническим решением к данному является устройство для контроля электрических машин, которое содержит регулятор напряжения, выход которого соединен с проверяемой электрической машиной, коммутатор, первый выход которого соединен со входом регулятора напряжения, а второй выход - с первым входом первого ключа, выход которого подключен ко входу нифрового вычислителя. Первый выход цифрового вычислителя соединен с первым входом коммутатора, второй выход - со входом печатающего блока, а третий выход ци(JpOBorc вычиспителя через блок управления с двигателем, который кинематически соединен с преобразователем угол-фаза и проверяемой электрической машиной. Второй вход коммутатора соединен с выходом проверяемой электрической машины, третий выход коммутатора - с первым входом второго ключа, выход которого через преобрагзователь соединен со вторым входом первого ключа. Устройство обеспечивает контроль всех параметров электрических машин, являющихся функцией от амплитуды и фазы нагпряжения переменного тока и угла поворота ротора. Однако недостатком этого устройства является наличие погрешности измерения от нестабильности частоты и амплиутды напряжения на выходе регулятора напряжения. Кроме того, наличие трех аналого-цифровых преобразователей усложняет схему устройства. Цель изобретения - повь1шение точности и упрощение устройствао Для этого в устройстве для контроля электрических машин введены полярно-координатный компенсатор и дополнительный преобразователь угол-фаза, который кинематически соединен с попярно-координатным компенсатором, один из входов которого соединен с четвертым выходом коммутатора, а другой вход - с выходом регулятора напряжения. Выход полярно-координатного компенсатора соединен с третьим входом первого ключа, выход дополнительного преобразователя угол-фаза - со вторым входом второго ключа, третий вход которого соединен с преобразователем угол-фаза. Полярно-координатный компенсатор содержит блок управгхения, цифро-аналоговый преобразователь напряжения и соединенный с ним блок сравнения, двигатель и кинематически соединенный с ним фазорегулятор, П Bbiii и второй входы блока управления соед нены с выходами блока сравнения, а первы выход с двигателем, второй выход блока управп.екия и выход фазорегулятора соедине ны со входами цифро-аналогового преобраз вателя напряжений. На чертеже представлена схема предлагаемого устройства. Оно содержит контролируемую электрическую машину 1, коммутатор 2, полярнокоординатный крмпенсатор 3, состоящий из блока сравнения 4, цифро-аналогового пре- образователк напряжения 5, блока управления 6, двигателя 7, фазорегулятора 8, пер вый клкоч 9, цифровой вычислитель 10, бл упранлекия 11в преобразователь фаза-код 12. преобразователь угол-фаза 13, второй ключ 14, двигатель 15, дополнительный преобразователь угол-фаза 16, регулятор напряжения 17 и печатающий блок 18, Выходное напряжение И контролируемой машины через коммутатор 2 поступает на один из входов блока сравнения 4 компенсатора 3. На другой вход блока сравнения 4 поступает напряжение U j с аналогового выхода цифро-аналогового преобразователя напряжения 5, на вход которого через фазорегулятор 8 поступает напряжение Up с регулятора напряжения 17, Одновременно напряжение U Q с регулятора 17 поступает на вход контролируемой машины. С выхода блока сравнения 4 напряжение U , пропорциональное разности модулей напряжений U и U | и Hanps жение и ( , пропорциональное разности фаз напряжений U .. и U поступают на вход блока управления 6 полярно-координатного компенсатора 3. С первого выхода блока управления 6 напряжение U поступает на управляющий вход преобразователя 5, изменяя напряжение U на выходе преобразователя 5 до момента равенства его по модулю напряжения U х Со второго выхода блока управления 6 напряжение U a поступает на приводной двигатель 7, который поворачивает вал фазорегулятора 8 и вал преобразователя уголфаза 16 до момента равенства фаз напряжений U ( и U . В момент равенства напряжений U и U по модулю и фазе сигнал о величине относ кодового выхода преобразователя 5 поступает через ключ 9 на вход цифрового вычислителя 10, а cj/sman о значении фазы напряжения U ( с выхода преобразователя угол-фаза 16 через второй ключ 14 - на вход преобразователя фаза-код 12. Закодированный сигнал с преобразователя 12 через первый ключ 9 поступает на вход цифрового вычислителя 10, Последний по заданной программе управляет работой коммутатора 2 и через блок управления 11 работой двигателя 15, Двигатель 15 поворачивает ротор электрической машины 1 и вал преобразователя угол-фаза 13. Сигнал об угловом положении ротора электрической машины с дополнительного преобразователя 16 поступает через второй ключ 14 на вход преобразователя фаза-код 12 и далее через первый ключ 9 на вход цифрового вычислителя 10, Обработанные результаты измерений отношения амплитуд напряжений контролируемой машины, разности их фаз и угла поворота ротора с выхода вычислителя 10 поступают в печатающий блок 18, Коммутатор 2 по командам, поступающим от цифрового вы- чиспителя 10, управляет ключами 9, 14 и регулятором напряжения 17, Таким образом, введение в устройство полярно-координатного компенсатора позво ляет уменьшить погрешность измерения от нестабильности частоты и амплитуды напряжения на выходе регулятора напряжения а введение второго преобразователя уголфаза позволяет осуществить преобразовани сигналов по каналам измерения угла и фазы одним аналого-цифровым преобразователем фаза-код. Рассмотрим проверку при помощи предлагаемого устройства, например, изменения коэффициента трансформации и фазового сдвига вращающегося трансформатора при изменении напряжения питания. Первоначально определяется нулевое положение ротора вращающегося трансформатора, С этой целью согласно программе контроля с выхода цифрового вычислителя 10 подается команда на блок управления 11. С его выхода напряжение подается на управляющую обмотку двигателя 15, который приводит во вращение валы 1 и 13, Двигатель -поворачивает вал вращающегося трансформатора в сторону, соответствующую его истинному нулевому положению, При вращении двигателя информации об угловом положении вала электрической машины и его выходном напряженки с преобразователя фаза-к од 12 и компенсатора 3 поступает в цифровой вычислитель 10. Угловое положение ротора атектрической машины, соответствующее минимуму отношения напряжений -р , регистрируется в памяти цифрового вычислителя как нулевое Затем посредством управляющих сигналов, поступающих с выхода цифрового вычислителя 10 на вход блока управление 11 и далее на управляющую обмотку двигателя 15, производится поворот ротора электрической машины на угол 90°. В этом поло жении при номинальнОлМ напряжении питани на входе электрической машины 1 с преобразователя фаза-код 12 и компенсатора 3 на вход цифрового вычислителя Ю поступает информация о начальном значении коэффициента трансформации контролируемой машины и начальном значении фазы напряжения на выходе дополнительного преобразователя угол-фаза 16, Затем по команде цифрового вычислителя 10 через коммутатор 2 производится изменение напряжения питания на выходе регулятора напряжения 1 При каждом новом значении напряжения питания на выходе контролируемой машины информация о текущем значении коэффициента трансформации и значении фазы напряжения на выходе преобразователя 16 с преобразователя фаза-код 12 и компенсатора 3 поступает на вход цифрового вычислителя 10, В нем по заданной программе производится вычисление изменений коэффициента трансформации и фазового сдвига контролируемого вращающегося трансформатора при изменении напряжения питания. При проверке погрешности отображения функциональной зависимости электрической машины и других ее параметров в цифровой вычислитель 10 закладываются типовые программы управления процессом контроля и математической обработкой резуль татов измерений. Таким образом, данное устройство при значительной простоте ачектрической схемы обладает большой точностью контроля. Формула изобретения 1.Устройство для контроля а ектрических машин, содержащее регулятор напряи :ения, выход которого соединея с проверяемой электрической машиной, коммутатор, первый выход которого соединен со входом регулятора напряжения; а второй выход - с первым входом первого :ш1очгаз выход которого подключен ко входу цифрового вычислителя, первый вых.од цнфрОБОго вы- чрюлителя соедннен с первым входом коммутатора, второй выход со входом печатающего блока, а третий выход цифрового вычислителя через блок управления - с двигателем, который книэ-матически соединен с преобразователем угол-ф-аза и проверяемой эпектрпческой машиной; второй вход комтчутатора соединен с выходом проверяемой электрическоГ машины, третий выход коммутатора соединен с первым БХОДО У второго ключа; выход которого через преобразователь фазе-код соединен со вторым входом первого ключа, отличающееся тем, что, с целью упрощения устройства н повышения его точности, в него ВБеде11Ы полярно-координатный компенсатор п дополнительный преобразователь угол-фаза, который кинематически соедт-юн с полярно-координатным кo пенсатором, одпн из входов которого соединен с четверты.- выходом коммутаторвг а другой - вход - с выходом регулятора напряжения, выход полярпо-коордиЕатного компенсатора соедннен с тротьи ; входом первого ключа5 выход дополнительного прообразователя угол-фаза - со вторым входом второго ключа, третий вход которого соединен с преобразователек; угол-фаза, 2,Устройство по По 1, о т л и ч а е е с я тем, что s нем полярно-коорди-натный компенсатор содержит блок упоавлениЯ| цифро-аналоговый преобразователь напряжения и соединенный с ним блок сравнения, двигатель и кинематически соединенный с ним фазорегулятор, первый и второй входы блока управления соединены с выходами блока сравнения, а первый выход - с двигателем, второй выход блока управления и выход фазорегулятора соединены со входами цифро-аналогового преобразователя напряжений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля электрических машин | 1974 |
|
SU535586A1 |
| Устройство для контроля электрических машин | 1976 |
|
SU633058A1 |
| Устройство для проверки датчиков угла поворота вала | 1977 |
|
SU656096A1 |
| Автоматический полярно-координатный компенсатор | 1972 |
|
SU474747A1 |
| Устройство для управления вентильным электродвигателем | 1981 |
|
SU972646A1 |
| Вентильный электропривод | 1987 |
|
SU1480084A1 |
| Вентильный электропривод | 1987 |
|
SU1635243A1 |
| Устройство для реверсивного бесщеточного возбуждения синхронной машины | 1986 |
|
SU1403335A2 |
| Реверсивный вентильный электродвигатель | 1985 |
|
SU1297186A1 |
| Устройство для измерения мощности двигателя | 1982 |
|
SU1030678A1 |
