Изобретение относится к измерению механических величин, в частности усилий, давлений, вибраций, деформаций и т.д., и может быть использовано при измерении как постоянных, так и переменных механических величин.
Цель изобретения - повышение чувствительности и точности измерения, а также обеспечение линейной зависимости выходной величины от входной при использовании в измерениях сегне- тоэластичного преобразователя.
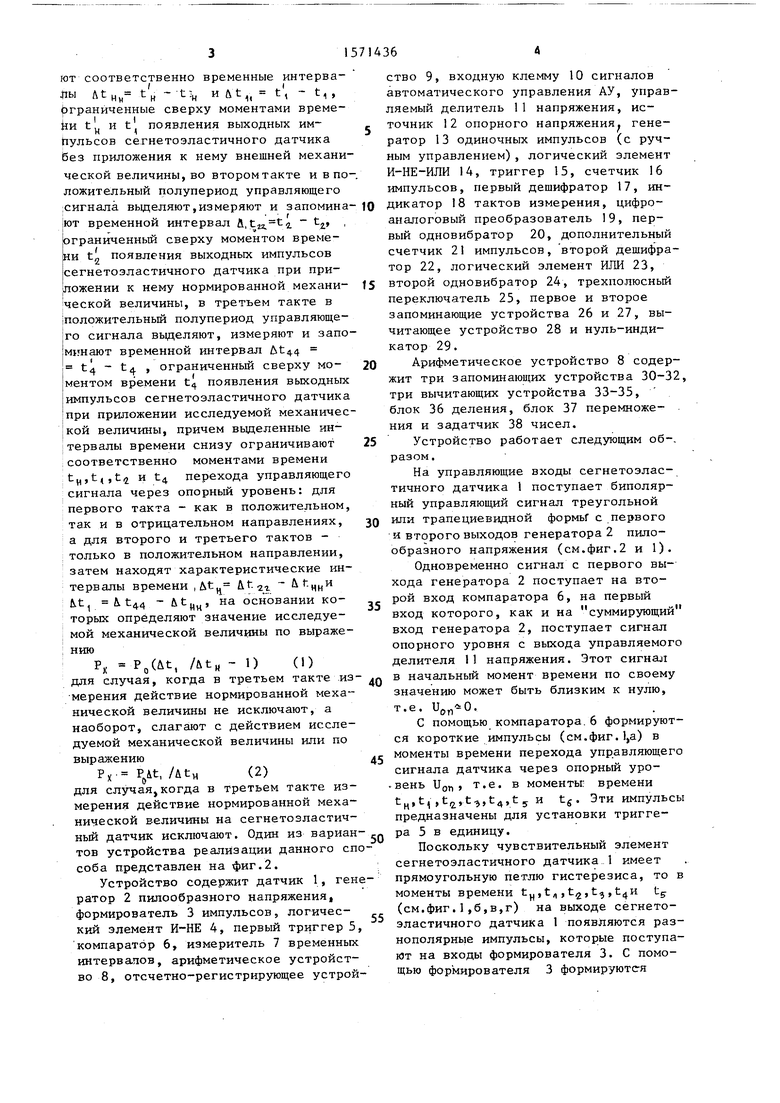
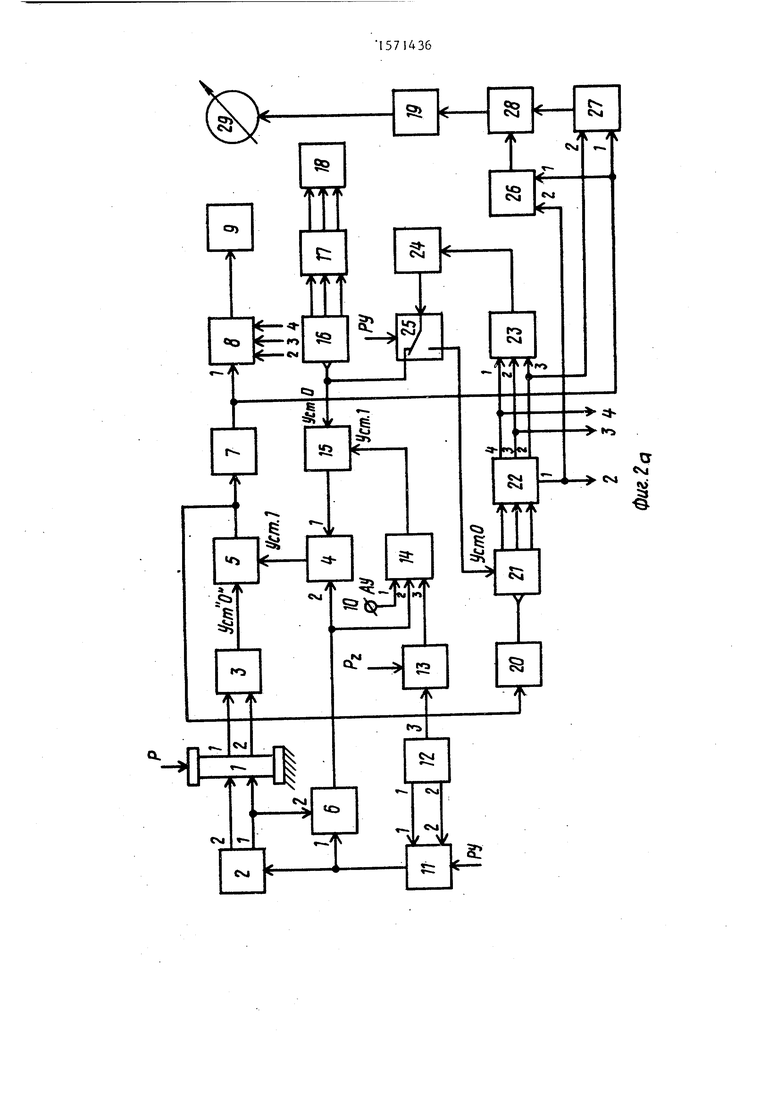
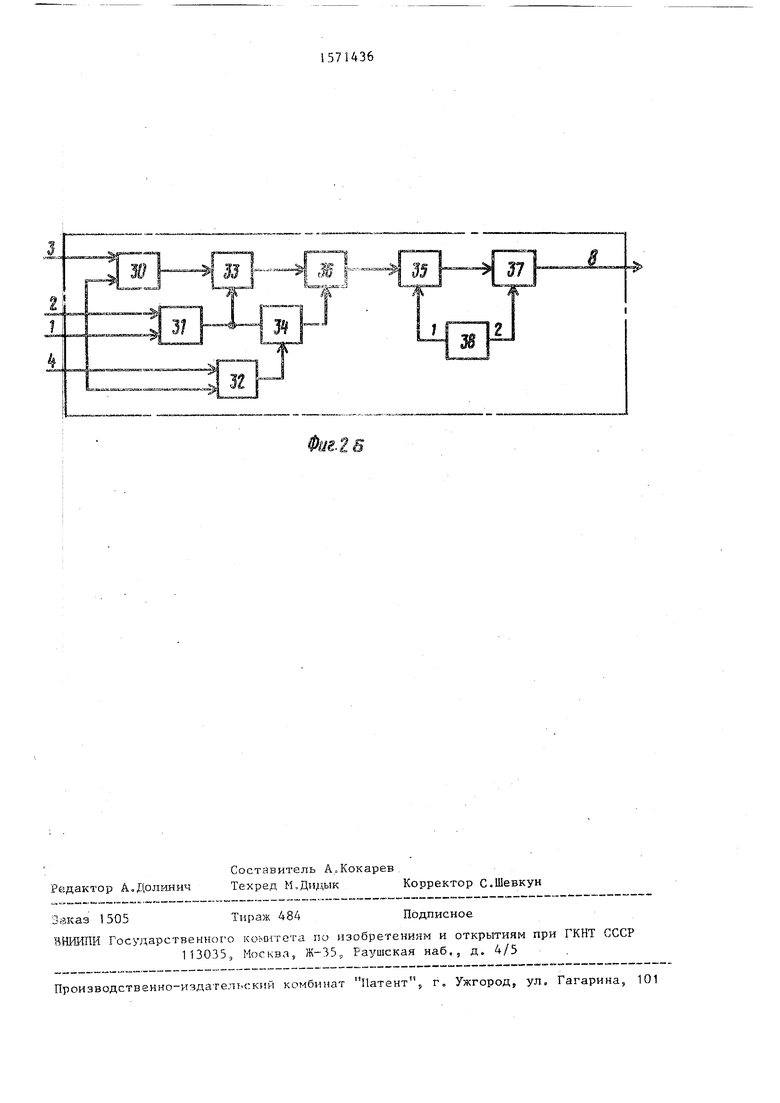
На фиг„1 изображены эпюры напряжений; на фиг.2 - структурная схема варианта устройства, реализующего данный способ.
Сущность способа заключается в том, что в процессе измерения, который состоит из трех тактов, на электрические входы сегнетоэластичного датчика подают биполярный управляющий .сигнал треугольной или трапециевидной формы, формируют короткие импуль- .сы в моменты времени tH,14,t2,13,t4, t 5- и t6 перехода управляющего сигнала через опорный уровень, нормируют по знаку, амплитуде и длительности выходные импульсы сегнетоэластичного датчика, затем в первом такте измерения в положительный и отрицательный полупериоды управляющего сиг- кала выделяют, измеряют и запоминаСЛ
Ј. СО 0
ют соответственно временные интерва- Лы AtHM t H t:H и ut,, t , - t,, Ограниченные сверху моментами време- Йи t H и t A появления выходных им Пульсов сегнетоэластичного датчика без приложения к нему внешней механической величины,во втором такте и в положительный полупериод управляющего сигнала выделяют,измеряют и запомина ют временной интервал U, - t2, , ограниченный сверху моментом времени t 2 появления выходных импульсов сегнетоэластичного датчика при приложении к нему нормированной механи- ческой величины, в третьем такте в положительный полупериод управляющего сигнала выделяют, измеряют и запоминают временной интервал ut - t - t$ , ограниченный сверху мо- центом времени t появления выходных импульсов сегнетоэластичного датчика при приложении исследуемой механической величины, причем выделенные интервалы времени снизу ограничивают соответственно моментами времени tjijt-oti и Ь4 перехода управляющего сигнала через опорный уровень: для первого такта - как в положительном, так и в отрицательном направлениях, а для второго и третьего тактов - только в положительном направлении, затем находят характеристические интервалы времени lut A l
чн
и
lit, &. t
- At,
на основании коII пс. u.ti.v- j-) «д. jrijri s
торых определяют значение исследуемой механической величины по выражению
рх P0(uti /utM О О) для случая, когда в третьем такте из-
мерения действие нормированной механической величины не исключают, а наоборот, слагают с действием исследуемой механической величины или по выражению
Рх PftAt, /4tM (2) для случая,когда в третьем такте измерения действие нормированной механической величины на сегнетозластич- ный датчик исключают. Один из вариан- тов устройства реализации данного способа представлен на фиг.2.
Устройство содержит датчик 1, генератор 2 пилообразного напряжения, формирователь 3 импульсов, логический элемент И-НЕ 4, первый триггер 5, компаратор 6, измеритель 7 временных интервапов, арифметическое устройство 8, отсчетно-регистрирующее устрой
0
С
Q
5
5
ство 9, входную клемму 10 сигналов автоматического управления АУ, управляемый делитель 11 напряжения, источник 12 опорного напряжения, генератор 13 одиночных импульсов (с ручным управлением), логический элемент И-НЕ-ИЛИ 14, триггер 15, счетчик 16 импульсов, первый дешифратор 17, индикатор 18 тактов измерения, цифро- аналоговый преобразователь 19, первый одновибратор 20, дополнительный счетчик 21 импульсов, второй дешифратор 22, логический элемент ИЛИ 23, второй одновибратор 24, трехполюсный переключатель 25, первое и второе запоминающие устройства 26 и 27, вычитающее устройство 28 и нуль-индикатор 29.
Арифметическое устройство 8 содержит три запоминающих устройства 30-32, три вычитающих устройства 33-35, блок 36 деления, блок 37 перемножения и задатчик 38 чисел.
Устройство работает следующим об-, разом.
На управляющие входы сегнетоэластичного датчика 1 поступает биполярный управляющий сигнал треугольной или трапециевидной формьГ с первого и второго выходов генератора 2 пилообразного напряжения (см.фиг.2 и 1).
Одновременно сигнал с первого выхода генератора 2 поступает на второй вход компаратора 6, на первый вход которого, как и на суммирующий вход генератора 2, поступает сигнал опорного уровня с выхода управляемого делителя 11 напряжения. Этот сигнал в начальный момент времени по своему значению может быть близким к нулю, т.е. .
С помощью компаратора 6 формируются короткие импульсы (см.фиг.а) в моменты времени перехода управляющего сигнала датчика через опорный уро- . вень Uot1 , т.е. в моменты времени tH,t, ,t2,t,t4,t5 и ts. Эти импульсы предназначены для установки триггера 5 в единицу.
Поскольку чувствительный элемент сегнетоэластичного датчика 1 имеет прямоугольную петлю гистерезиса, то в моменты времени tH,t, t2,Ц ,Ци 15 (см.фиг.1,б,в,г) на выходе сегнетоэластичного датчика 1 появляются раз- нополярные импульсы, которые поступают на входы формирователя 3. С помощью формирователя 3 формируются
51
однополярные выходные импульсы датчика 1 (см.фиг.2,6,в,г).
Эти импульсы поступают на вход установки нуля триггера 5 в указанные моменты времени, устанавливая его в нулевое (исходное) состояние. Устройство готово к работе.
Перед началом измерения исследуемой механической величины, когда на датчик 1 механическая величина не воздействует, устанавливают режим коррекции измерительного устройства Это осуществляется путем перевода трехполюсного переключателя 25 в положение, противоположное указанному на фиг.2а. В этом положении трехполюсного переключателя 25 осуществляют установку опорного уровня, а следовательно, и смещение управляющего сигнала на ±Uon путем изменения коэффициента передачи делителя напряжения 11, выполненного, например, в виде резистивного моста постоянного тока.
Установку опорного уровня U производят до момента равенства временных интервалов AtНни AtM, который контролируется по показанию нуль- индикатора 29.
Процесс установки равенства временных интервалов, а следовательно, и опорного уровня осуществляется следующим образом. С выхода генератора 13 одиночных импульсов поступает одиночный импульс, соответствующий лог. 1, который разрешает прохождение выходного импульса компаратора 6 на вход установки единицы триггера 15 (см.фиг.2а). В результате триггер 15 переводится в состояние лог. 1 на выходе.
Если в начальный момент времени триггер 5 находился в состоянии.нуля на его выходе, то первый же импульс, прошедщий логический элемент И-НЕ 4 с выхода компаратора 6, установит триггер 5 в состояние лог. М на его выходе. Согласно способу за этим импульсом последует выходной импульс датчика 1, соответствующий моменту времени равенства мгновенного значения управляющего сигнала и коэрцитивного напряжения. В результате с помощью триггера 5 формируется прямоугольный импульс, длительностью, например, &tHH t M - tH, который поступает на вход измерителя 7 временных интервалов и на вход первого
714366
одновибратора 20. С помощью измерителя 7 временных интервалов измеряется длительность этого импульса. Ре-
зультат измерения в виде, например, цифрового кода поступает на первые входы арифметического устройства 8, первого и второго запоминающих устройств 26 и 27.
}0 Выходной импульс триггера 5 (длительностью At нн) запускает одновибра- тор 20 (см.фиг.2). Последний формирует счетные импульсы постоянной длительности и крутизны фронтов, кото15 рые подсчитываются счетчиком 21 импульсов. На выходе счетчика 21 установлен дешифратор 22, преобразующий выходной код счетчика 21 в позиционный код на четыре направления.
20 При поступлении первого импульса ( &tHH) на первом выходе дешифратора 22 появляется сигнал, разрешающий запись результата измерения NHH в запоминающие устройства 26 и 31
25 (см.фиг.2а,б).
Как видно из эпюр напряжений, представленных на фиг.1,а,б, в момент времени t, очередной импульс с выхода компаратора 6 поступает че30 рез логический элемент И-НЕ 4 на вход установки единицы триггера 5. Запрета на его прохождение нет, так как триггер 15 по-прежнему находится
в состоянии лог. 1 на его выходе. На выходе триггера 5 устанавливается
уровень, соответствующий лог. М.
Затем в момент времени t с выхода формирователя 3 на вход установки нуля триггера 5 поступае-т новый
импульс, который устанавливает триггер 5 в состояние лог. 1 на его выходе. В результате на выходе триггера 5 формируется второй прямоугольный импульс длительностью Л t,, t ,,- t,
(см.фиг.1 д).
Прямоугольный импульс длительностью ut(1 поступает, как и предыдущий импульс длительностью ЛЈНн, на измеритель временных интервалов 7 и на
одновибратор 20. При поступлении на вход счетчика 21 через одновибратор 20 второго импульса на втором выходе дешифратора 22 появляется сигнал, разрешающий запись результата
измерения N временного интервала utH в запоминающее устройство 27 (см.фиг.2а) и сбрасывающий счетчик 21. С помощью вычитающего устройства 28 определяется разность чисел, записанных в запоминающие устройства 26 И 27. Результат вычитания N NHH - Nj, с помощью цифр о аналогов о г о преобразователя 19 преобразуется в аналоговый сигнал 11д, который поступает ha нуль-индикатор 29, обеспечивая контроль за моментом времени достижения равенства временных интервалов AtHHH it,,, . Причем в каждый период управляющего сигнала в запоминающие устройства 26 и 27 записываются коды кисел NHH и N4, , отличные от первоначальных, полученных до изменения коэффициента передачи управляемого делителя 11 напряжения при формировании опорного уровня. При достижении нулевого показания нуль-индикатора 29 (U д 0) трехполюсный переключатель 25 устанавливается в положе- ние, указанное на фиг.2а. Прибор готов к измерению.
Формирование опорного уровня необходимо для достижения высокой чув- ствительности и точности измерения механических величин, расширения динамического диапазона измеряемых величин и исключения влияния усилия, создаваемого силовводящим элементом сегнетоэластичного датчика. Действие последнего в некоторых сегнетоэлас- тичных датчиках компенсируется конструктивным решением.В этом случае чувствительный элемент датчика имеет симметричную петлю гистерезиса относительно осей координат. Тогда временные интервалы At н( и &t( формируются равными по длительности, а в качестве опорного уровня используют ну левой уровень.
Если конструкция датчика не обеспечивает компенсацию указанного усилия, то формируют опорный уровень, при котором &tHW b.t . Причем раве ство временных интервалов u.tHHH kt при формировании опорного уровня достигается за счет смещения управляющего сигнала на постоянный уровень, который используют в качестве опорного уровня. Направление смещения зависит от знака разности временных интервалов &.t нн и utj,, .
Сам процесс измерения состоит из трех тактов. Причем в первый, второй и третий такты получают результаты измерения; 1) без приложения к датчику механической величины; 2) с приложением нормированной механической
Q
0
5
величины и 3) с приложением к датчику исследуемой механической величины.
В положении трехполюсного переключателя 25, указанном на фиг.2а, триггер 5 переводится в состояние лог.О на его выходе: в первый такт измерения - после прохождения первого и второго прямоугольных импульсов на счетчик 21, а во второй и третий такты - после прохождения третьего и четвертого импульсов (см.фиг.1д).
Для получения результатов измерения временных интервалов AtHH HUt при установленном значении опорного уровня в первом такте измерения вручную запускают генератор 13 одиночных импульсов. Процесс формирования и измерения временных интервалов ut и At 1( вновь повторяется. В первый такт измерения в запоминающее устройство 31 запишется код числа N,HH N4, соответствующий i установленному опорному уровню Uor).
После окончания первого такта измерения вручную или автоматически к сегнетоэластичному датчику 1 прикладывают нормированную механическую величину РО , цифровой эквивалент NH которой устанавливают на втором выходе задатчика чисел 38.
После приложения нормированной механической величины Pg вновь запускают генератор 13 одиночных импуль- / сов и процесс измерения повторяется аналогичным образом. Во втором такте измерения формируют и измеряют временной интервал (см.фиг.1,д), ограниченный моментами времени t и t2 (см.фиг.1,а,в).
Результат измерения N22записывается в запоминающее устройство 30, поскольку при поступлении третьегсз импульса на счетчик 21, разрешающий потенциал появится на третьем выходе дешифратора 22, а следовательно, и на управляющем входе запоминающего устройства 30.
С помощью первого вычитающего устройства 33 результаты измерения временных интервалов, записанные в запоминающих устройствах 30 и 31,вычитаются. Код числа N 1г цнс вых° да вычитающего устройства 33 поступает на вход Делитель блока 36 деления.
Во втором такте измерения триггер 15 устанавливается в состояние лог. llf на его выходе только на вре91
мя формирования с помощью триггера 5
одного прямоугольного импульса длительностью &t22(см.фиг.1,д).
По окончании второго такта измере ния вручную или автоматически к сегне тоэластичному датчику прикладывается исследуемая механическая величина Рд . Нормированная механическая величина РО в рассматриваемом случае не снимается. Процесс измерения в третьем такте измерения повторяется аналогичным образом, как и во втором такте. Результат измерения N44временного интервала t - tHHпоступает в запоминающее устройство 32, так как четвертый импульс, поступивший на счетчик 21, обеспечивает появление импульса разрешения записи на четвертом выходе дешифратора 22, соединенном с управляющим входом запоминающего устройства 32.
Код числа N44поступает с выхода запоминающего устройства 32 на вход Уменьшаемое второго вычитающего устройства 34. С выхода последнего код числа N N44 МццпостУпает на вход Делимое блока 36 деления. В результате деления двух чисел ( N,,) на вход Уменьшаемое 1 третьего вычитающего устройства 35 поступит код числа N, N2/Nf , а на вход Вычитаемое - код единички. С выхода третьего устройства 35 вычитающего на вход Множимое блока 37 перемножения поступит код числа N-j N2l- 1. На вход Множитель блока 37 поступает код числа NH, эквивалентный нормированной механической величине.
С помощью блока 36 перемножения обеспечивается получение результата измерения в тех же единицах, что и измеряемые механические величины. С выхода блока 37 перемножения код числа N), N -NH поступает наотсчет- но-регистрирующее устройство 9, которое отображает результат измерения исследуемой механической величины в цифровом виде.
Подставим значения N и NH в выражение для Nx через N2 и N( . Тогда получим
Nx 5™- ° V
(3)
что соответствует выражению (1). Индикатор 18 тактов измерения представляет собой схему с тремя све- тодиодами, соответственно числу так
714361°
тов измерения, которые поочередно загораются после окончания каждого из трех тактов измерения. Это необходимо для визуального контроля окончания каждого такта измерения, готовности прибора к последующему такту измерения и принятия решения по установке на датчик 1 нормированной или исследуемой механических величин. Управление индикацией осуществляют посредством счетчика 16 и дешифратора 17. Следует отметить, что сформированная указанным образом первая па5
10
ра временных интервалов содержит в
себе информацию об отсутствии воздействия на сегнетоэластичный датчик внешней механической величины, а также информацию о степени асимметрии
петли гистерезиса, вызванной, например, усилием силовводящего элемента датчика или асимметрией управляющего сигнала, т.е. информацию о систематической погрешности измерения. Временной интервал 22содержит информацию как-о степени асимметрии петли гистерезиса и управляющего сигнала, так и о значении нормированной механической величины РО . В целом временной интервал Ut2zсодержит информацию как о
i
нормированной механической величине,
так и о систематической погрешности измерения. Временной интервал &t44 сформированный в третий такт измерения, содержит информацию как о систематической погрешности измерения, так и о значении исследуемой механической величины Рх .
Формула изобретения
Способ измерения механических величин, заключающийся в поочередном приложении к чувствительному элементу сегнетоэластичного датчика нормированной и исследуемой механических величин, предварительно преобразованных в сосредоточенное усилие, в измерении временных параметров выходного электрического сигнала датчика и определении измеряемой механической величины по определенному алгоритму, отличающийся тем, что, с целью повышения чувствительности и точности измерения, а также обеспечения линейной зависимости выходной величины от входной, при измерении временных параметров сначала на электрические входы сегнетоэластичного дат11
чика подают биполярный управляющий сигнал треугольной или трапециевидной фЬрмы, формируют короткие импульсы в мрменты времени tM,t,t4,t,,t5 и; t6 перехода управляющего сигнала через опорный уровень, нормируют по знаку, амплитуде и длительности выходные импульсы сегнетоэластичного датчика, затем в режиме настройки в положительный и отрицательный полупе- р иоды управляющего сигнала выделяют, измеряют и добиваются равенства вре- м|енных интервалов &t WH t - tM и t«- t1, - t
157143612
такте в положительный полупериод управляющего сигнала выделяют, измеряют и запоминают временной интервал i
At
44
10
j, ограниченных сверху 1 -- появления
моментами времени t( выходных импульсов сегнетоэластично- г(о датчика без приложения к нему внешней механической величины, затем в Нервом такте измерения в положительный полупериод управляющего сигнала выделяют, измеряют и запоминают временной интервал AtWH , во втором так- te в положительный полупериод управляющего сигнала выделяют, измеряют и Запоминают временной интервал &t22 tj - tt , ограниченный сверху моментом времени t 4 появления выходных импульсов сегнетоэластичного датчика При приложении к нему нормированной механической величины Р0,в третьем
- U
t4 С4 ограниченный сверху моментом времени появления выходных импульсов сегнетоэластичного датчика при приложении исследуемой механической величины Ру, причем выделенные интервалы времени снизу ограничивают соответственно моментами времени tH,t,,t и Ц перехода управляющего сигнала через опорный уровень для первого такта в положиU тельном и отрицательном направлениях а для второго и третьего тактов в положительном направлении, затем находят характеристические интервалы времени &п „ йС2г- at WH и At
20 ,определяют значение исследуемой механической величины по выражению Рх Р0 ( &t,/utн - 1), для случая, когда в третьем такте измерения действие нормированной механи25 ческой величины слагают с действием исследуемой механической величины, по выражению Рх PQ &t , / it,j , когда в третьем такте измерения действие нормированной механической ве2Q личины на сегнетоэластичный датчик исключают.
l-tSm&ttm ЛРфаюнт SttJmaftm
т т т
ют и запоминают временной интервал i
At
44
t4 С4 ограниченный сверху моментом времени появления выходных импульсов сегнетоэластичного датчика при приложении исследуемой механической величины Ру, причем выделенные интервалы времени снизу ограничивают соответственно моментами времени tH,t,,t и Ц перехода управляющего сигнала через опорный уровень для первого такта в положительном и отрицательном направлениях, а для второго и третьего тактов в положительном направлении, затем находят характеристические интервалы времени &п „ йС2г- at WH и At
0 ,определяют значение исследуемой механической величины по выражению Рх Р0 ( &t,/utн - 1), для случая, когда в третьем такте измерения действие нормированной механи5 ческой величины слагают с действием исследуемой механической величины, по выражению Рх PQ &t , / it,j , когда в третьем такте измерения действие нормированной механической веQ личины на сегнетоэластичный датчик исключают.
Фиг1



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения механических величин | 1989 |
|
SU1737287A1 |
| Способ измерения механических величин с помощью сегнетоэластичного преобразователя | 1986 |
|
SU1661593A1 |
| Способ определения температуры и влажности воздуха и устройство для его осуществления | 1990 |
|
SU1783400A1 |
| Способ измерения амплитудных значений электрических сигналов | 1986 |
|
SU1509751A1 |
| Спектрометр | 1991 |
|
SU1800291A1 |
| Способ определения мгновенных значений фазового сдвига электрических сигналов | 1988 |
|
SU1631458A1 |
| Устройство для измерения мощности | 1990 |
|
SU1751685A1 |
| МНОГОМЕРНЫЙ СТАТИСТИЧЕСКИЙ АНАЛИЗАТОР УСРЕДНЕННОЙ МОЩНОСТИ НЕСТАЦИОНАРНОЙ НАГРУЗКИ | 1992 |
|
RU2060542C1 |
| Способ измерения амплитудного значения электрического сигнала | 1986 |
|
SU1441320A1 |
| Аналого-цифровой преобразователь сдвига фаз | 1981 |
|
SU955519A2 |

Изобретение относится к измерительной технике. Цель изобретения - повышение чувствительности и точности измерения, обеспечение линейной зависимости между входной и выходной величинами. Способ измерения механических величин, заключающийся в том, что при проведении измерений механических величин с помощью сегнетоэластичного датчика выделяют характеристические интервалы времени, ограниченные моментами перехода управляющего сигнала треугольной или трапециевидной формы через сформированный опорный уровень с одной стороны и моментами появления импульсов на выходном сигнале датчика с другой стороны, причем характеристические интервалы выделяются без приложения к датчику нагрузки, при приложении к датчику эталонной нагрузки и при приложении к датчику измеряемой нагрузки или измеряемой нагрузки и эталонной одновременно, что определяет три такта измерений. По найденным интервалам определяют измеряемую нагрузку. 2 ил.
| Измерительный преобразователь напряжения | 1976 |
|
SU629508A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Цифровой измеритель усилия | 1975 |
|
SU541094A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
