Изобретение относится к измерительной технике и может быть использовано при измерении как постоянных во времени, так и переменных механических величин, в частности усилий, давлений, вибраций, крутящих моментов, деформаций и механических напряжений.
Целью изобретения является повышение точности.
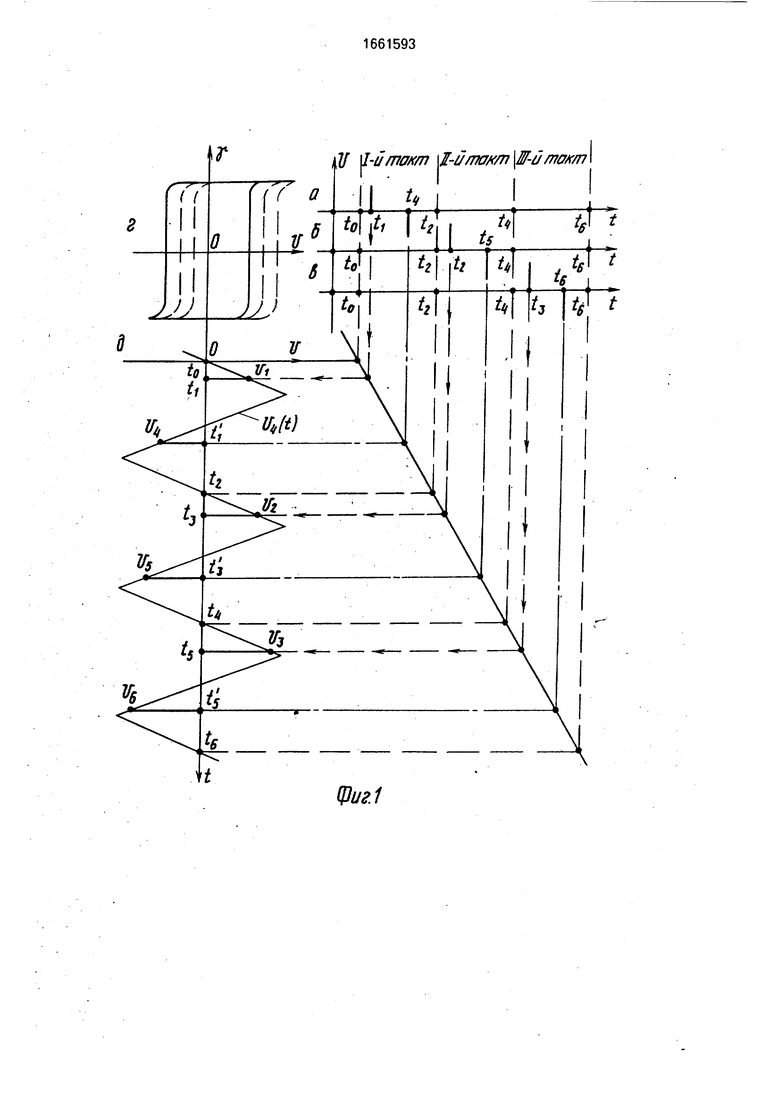
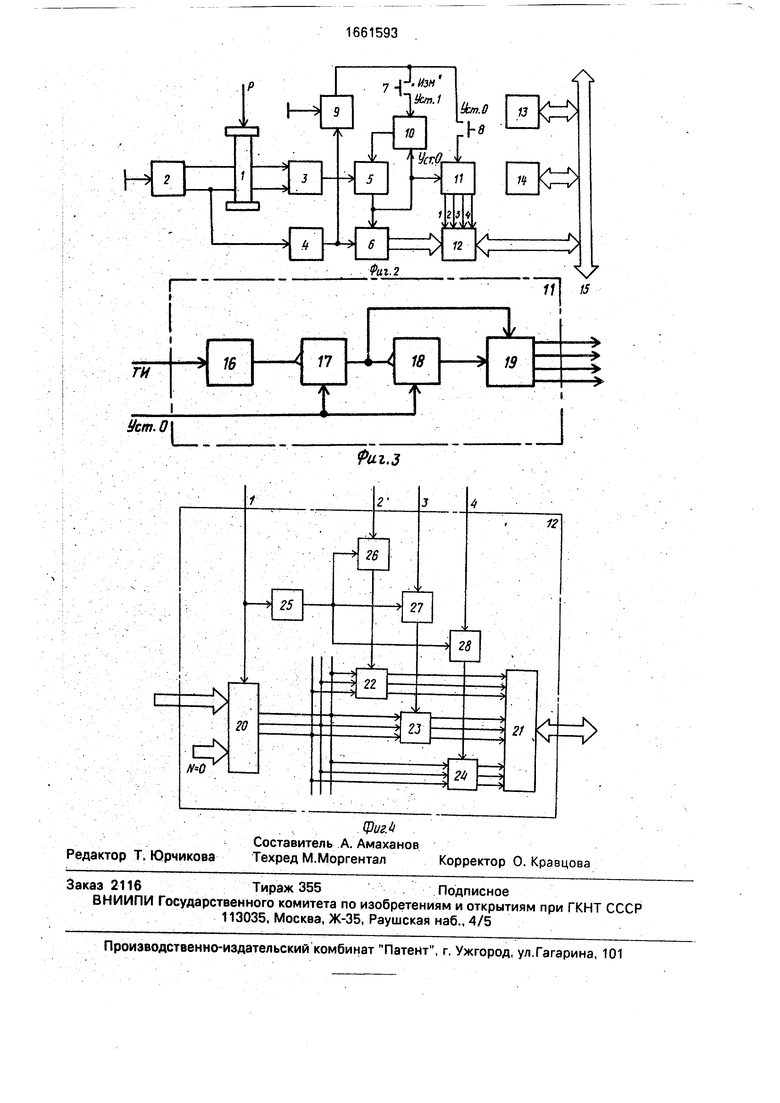
На фиг.1 представлены эпюры напряжений; на фиг.2 - структурная схема устройства, реализующего данный способ, вариант; а на фиг.З и 4 - структурные схемы соответственно блока управления и мультиплексора, входящих в состав устройства для реализации способа.
Сущность способа измерения механических величин с помощью сегнетоэластич- ного преобразователя заключается в том, что его осуществляют в течение трех последовательных тактов, в первом из которых преобразователь изолируют от действия внешних механических величин, во втором к преобразователю прикладывают нормированную механическую величину Р0, а в третьем к преобразователю прикладывают измеряемую механическую величину Рх или сумму Рх+Ро величин.
о
ON
СП О CJ
К электродам кристалла преобразователя прикладывают управляющее напряжение треугольной формы (фиг. 1д), в положительные или отрицательные полупериоды которого регистрируют его мгновенные значения (соответственно Ui1, 11з , Us и U21, U41, Ue1), соответствующие моментам (ti, t3, ts и ti1, ts1, ts1) переключения направления поляризации у кристалла преобразователя. Под механическим воздействием на кристалл сегнетоэластичного преобразователя петля гистерезиса, определяющая переполюсовку направления поляризации кристалла, смещается от своего нейтрального положения (фиг. 1г). Вследствие этого смещения происходит разбаланс величин мгновенных значений, зафиксированных в момент переполюсовки кристалла при положительных и отрицательных полупериодах управляющего напряжения.
По зарегистрированным мгновенным значениям DI в каждом такте измерения нормируют измерительные сигналы . Причем в положительный полу период управляющего напряжения в первом такте - Ui1, во втором такте г Уз1, а в третьем рз Us1, в отрицательный полупериод соответственно ,#2 U/ , (рз Ue .При этом каждое мгновенное значение Ui может определяться как среднее за несколько периодов управляющегонапряжения в соответствующем такте.
Измеряемую механическую величину Рх находят по аналитическому выражению
.-р.-.о)
если в третьем такте к преобразователю прикладывают только механическую величину Рх, или по аналитическому выражению
Рх Ро .gJlg pz -
преобразователю прикладывают сумму механических величин РХ+РО.
Измерительные сигналы де могут формироваться и по другому алгоритму, если мгновенные значения Ui регистрируют в п положительных и п отрицательных полупериодах управляющего напряжения. В этом случае измерительные сигналы (р формируются как разность усредненных мгновенных значений, зарегистрированных в положительные (Ui1, из1, Us1) и отрицательные (Ua1, Ui1, Ue1) полупериоды соответствующих периодов управляющего напряжения. В этом случае р (Ui1-U21); р2 (из1-иД P3 (U51-U61).
Устройство для реализации предложенного способа (фиг.2) содержит сегнетоэла- стичный преобразователь 1, генератор 2
если в третьем такте к
треугольного напряжения, формирователь 3 импульсов, делитель 4 напряжения, логический элемент И-НЕ 5, аналого-цифровой преобразователь 6, кнопки 7 и 8 Изм (измерение) и Уст.О (установка нуля), нуль-орган 9, триггер 10, блок 11 управления, мультиплексор 12, микропроцессор 13, от- счетно-регистрирующее устройство 14, общую шину 15.
0Блок 11 управления (фиг.З) состоит из
одновибратора 16, двух счетных триггеров 17 и 18 и дешифратора 19, а мультиплексор 12 (фиг.4) включает в себя первый и второй коммутаторы 20 и 21, первый, второй и тре5 тий регистры 22, 23 и 24, одновибратор 25 и три логических элемента ИЛИ 26, 27 и 28.
Электрический вход сегнетоэластичного преобразователя 1 соединен с парафаз- ными выходами генератора 2 треугольного
0 напряжения, первый выход которого подключен также через делитель 4 нрапряже- ния, к входу аналого-цифрового преобразователя 6. Управляющий вход последнего соединен с выходом логического
5 элемента И-НЕ 5, чей первый вход подключен к выходу формирователя 3 импульсов. Второй вход логического элемента И-НЕ 5 соединен с выходом триггера 10, вход установки единицы которого подключен через
0 кнопку 7 Изм. к выходу нуль-органа 9. Вход нуль-органа соединен с выходом делителя 4 напряжения. Вход установки нуля триггера 10 соединен с выходом логического элемента И-НЕ 5, к которому подключен
5 и первый вход блока 11 управления, чей второй вход соединен через кнопку 8 Уст.О с выходом нуль-органа 9. Выходы блока 11 управления соединены с одноименными входами мультиплексора 12, входы которого
0 подключены к выходам аналого-цифрового преобразователя 6. Выходы мультиплексора 12 подключены к общей шине 15, с которой соединены микропроцессор 13 и отсчетно-регистрирующее устройство 14,
5 Первый вход блока 11 управления соединен через одновибратор 16 со счетным входом первого триггера 17, вход установки нуля которого соединен с вторым входом блока 11 управления и с входом установки
0 нуля второго триггера 18. Счетный вход триггера 18 соединен с вторым входом дешифратора 19 и подключен к выходу первого триггера 17. Первый вход дешифратора 19 соединен с выходом второго триггера 18,
55 а выходы дешифратора 19 являются выходами блока 11 управления.
Информационные входы мультиплексора 12 (фиг.4) являются первыми входами первого коммутатора 20, вторые входы которого подключены к земляной шине. Выходы
первого коммутатора 20 соединены с одноименными входами первого, второго и третьего регистров 22, 23 и 24, чьи выходы подключены соответственно к первым, вторым и третьим входам второго коммутатора 21, выходы которого являются выходами мультиплексора 12. Управляющий вход первого коммутатора 20 соединен с первым входом мультиплексора 12 и с входом одно- вибратора 25, выход которого подключен к вторым входам логических элементов ИЛИ 26, 27 и 28, чьи первые входы являются соответственно вторым, тьретьим и четвертым входами мультиплексора 12. Выходы логических элементов ИЛИ 26, 27 и 28 соединены с управляющими входами соответственно первого, второго и третьего регистров 22, 23 и 24.
Работа устройства заключается в следующем.
При включении устройства на электрические входы сегнетоэластичного преобразователя 1 поступает управляющий сигнал треугольной формы с выходов генератора 2. Выходной сигнал сегнетоэластичного преобразователя поступает на входы формирователя 3 импульсов, с помощью которого в положительные полупериоды управляющего сигнала формируются короткие импульсы в моменты времени ti, ta, ts (фиг.1 а, б, в), соответствующие моменту времени скачкообразного изменения направления поляризации кристалла преобразователя 1.
Одновременно выходной сигнал генератора 2 поступает через делитель 4 напря- жения на вход аналого-цифрового преобразователя 6. Коэффициент деления Kg делителя 4 напряжения выбирается таким, чтобы его выходной сигнал не превышал динамический диапазон Одцп аналого-цифрового преобразователя 6, т.е.
,(2)
итвых
где Umax и U твых - амплитудные значения входного и выходного сигналов делителя напряжения.
Перед началом измерения нажимают кнопку 8 Уст.О. В результате на второй вход блока 11 управления поступает серия импульсов (соответствующих логическому О), формируемых в моменты времени перехода через ноль управляющего сигнала преобразователя 1. С второго входа блока 11 управления эти импульсы поступают на входы установки нуля первого и второго триггеров 17 и 18. В результате на первом выходе дешифратора 19 (или блока 11 управления) появляется сигнал, устанавливающий первый коммутатор 20 мультиплексора 12 в состояние, при котором код нуля через вторые входы коммутатора 20 поступают на входы регистров 22, 23 и 24 мультиплексора 12. Через время г код нуля записывается в 5 регистры 22, 23 и 24. Это достигается за счет импульса, формируемого одновибратором 25 с задержкой т и поступающего через логические элементы ИЛИ 26, 27 и 28 на управляющие входы регистров 22, 23 и 24
0 соответственно.
Процесс измерения проводится в три такта. В первом такте воздействие внешней механической величины на сегнетоэластич- ный преобразователь 1 отсутствует. Опера5 тор нажимает кнопку 7 Изм., устанавливая тем самым триггер 10 в состояние логической 1 на его выходе, разрешающей прохождение короткого импульса с выхода формирователя ,3 через логический элемент
0 И-НЕ 5 на управляющий вход аналого-цифрового преобразователя 6. В момент времени (фиг. 1а), соответствующий появлению короткого импульса в первом такте измерения, в выходной регистр аналого-цифрового
5 преобразователя 6 записывается код числа Nl /oKglVtH y)+ AN Ni1(1+ })+ AN,(3) где р - крутизна преобразователя 6;
AN р Kg A U - аддитивная составляющая погрешности измерения;
0Ni1 Kg р Ui - истинное мгновенное
значение управляющего сигнала в момент времени ti.
Одновременно выходной импульс логического элемента И-НЕ 5 поступает на вход
5 установки нуля триггера 10, переводя его в состояние логического О на выходе, и тем самым запрещает прохождение следующих коротких импульсов через логический элемент И-НЕ 5 в первом такте измерения.
0 Кроме того, выходной импульс логического элемента И-НЕ 5 поступает на первый вход блока 11 управления. С помощью одновиб- ратора 16с некоторой задержкой Г2 формируется импульс, устанавливающий
5 триггер 17 в состояние логической 1 на его выходе. Это ведет к исчезновению сигнала на первом и появлению сигнала на втором выходе дешифратора 19.
С второго выхода дешифратора 19 этот
0 сигнал поступает через логический элемент ИЛИ 26 на управляющий вход первого регистра 22. При отсутствии сигнала на первом выходе дешифратора 19 первый коммутатор . 20 устанавливается в состояние, при кото5 ром выходной код числа (3) через первые входы коммутатора 20 поступает на входы регистра 22.
Наличие разрешающего сигнала на управляющем входе первого регистра 22 обеспечивает запись кода числа (3) в этот регистр.
Во втором такте на сегнетоэластичный преобразователь 1 воздействуют нормированной механической величиной Р0, а затем нажимают кнопку 7 Изм. В момент времени т.2(фиг. 16) появляется короткий импульс, разрешающий измерение мгновенного значения управляющего сигнала с помощью аналого-цифрового преобразователя 6.
Затем результат измерения Мз /эКдиз1(Н y)f ДМ Мз1(1 + уН АN,(4) где 1Чз1 р КдОз1 - истинное мгновенное Значение управляющего сигнала в момент бремени t3,записывается во второй регистр 23 мультиплексора, поскольку выходной им- |1ульс логического элемента И-НЕ 5 устанавливает первый триггер 17 в состояние Логического О на его выходе, а второй триггер 18 - в состояние логической 1. Это йедет к тому, что на третьем выходе дешифратора 19 появляется сигнал, разрешающий Запись кода числа в регистр 23.
В третьем такте процесс измерения уже Исследуемой механической величины Рх аналогично повторяется. В третьем такте измерения в регистр 24 записывается код числа
N5 pKgU51(1+ УН AN N51(1+ у К А N,(5) где Ns1 р KgUs1 - истинное мгновенное значение управляющего сигнала в момент времени ts.
Разрешающий сигнал на управляющий вход регистра 24 поступает через логический элемент ИЛИ 28 с четвертого выхода дешифратора 19, формируемого при состояниях логической 1 на выходах триггеров 17 и 18.
С выходов регистров 22, 23 и 24 коды чисел (3), (4), (5) поступают соответственно на первые, вторые и третьи входы второго коммутатора 21. Последний управляется микропроцессором 13, с помощью которого осуществляется обработка результатов промежуточных измерений в соответствии с выражением
Nx Nc
N5 -N1
° NS-NI
где ,T.e. число No равно значению нормированной механической величины при приложении к сегнетоэластичному преобразователю 1 в третьем такте измерения
только исследуемой механической величины РХ, или в соответствии с выражением
м - м NS Na Nx No Ns-МГ
- при приложении как исследуемой Рх, так и нормированной Ро механических величин, т.е. суммы Рх+Ро.
Формула изобретения
1. Способ измерения механических ве0 личин с помощью сегнетоэластичного преобразователя, заключающийся в том, что его осуществляют в течение трех последовательных тактов, в первом из которых преобразователь изолируют от действия внешних
5 механических величин, но втором к преобразователю прикладывают нормализованную механическую величину Р0, а в третьем к преобразователю прикладывают измеряемую механическую величину Рх или сумму
0 Рх+Ро величин, при этом к электродам сег- четоэластичного преобразователя прикладывают управляющее напряжение треугольной формы, а измеряемую механическую величину РХВЫЧИСЛЯЮТ по определен5 ному аналитическому выражению, отличающийся тем, что, с целью повышения точности, в положительных или отрицательных полупериодах управляющего напряжения регистрируют его мгновенные значения,
0 соответствующие моментам переключения направления поляризации кристалла сегне- тоэлектрического преобразователя, по величине которых в каждый тзкт измерения Формируют мзмермтельные сигнзлы р , за5
тем определяют измеряемую механическую величину Рх по аналитическому выражению рз - p-i
р2
Px p0J LZL2L
или Рх Р.
Ро
в случае прикладывания к преобразователю в третьем такте соответственно мзханиче- ской величины Рх или суммы механических величин РХ+ Ро, где р , р2 , рз измерительные сигналы, сформированные соответственно в первом, втором и третьем тактах. 2. Способ по п. 1,отличающийся тем, что измерительные сигналы р формируют как разность мгновенных значений, зарегистрированных в положительные и отрицательные полупериоды соответствующих периодов управляющего напряжения.
О
V
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения механических величин | 1986 |
|
SU1571436A1 |
| Устройство для измерения механических величин | 1989 |
|
SU1737287A1 |
| Устройство для контроля центрировки линз | 1983 |
|
SU1196715A1 |
| Многоканальный программируемый аналого-цифровой преобразователь | 1985 |
|
SU1266002A1 |
| Устройство для автоматизированного контроля параметров реле | 1985 |
|
SU1265704A1 |
| Устройство для преобразования двоичного кода в код по модулю К | 1990 |
|
SU1793548A1 |
| Преобразователь активной мощности в цифровой код | 1989 |
|
SU1780033A1 |
| Аппаратура акустического каротажа нефтяных и газовых скважин | 1980 |
|
SU898369A1 |
| Устройство формирования много-СТупЕНчАТОгО КВАзиСиНуСОидАльНОгОТРЕХфАзНОгО НАпРяжЕНия | 1978 |
|
SU809437A1 |
| Устройство для контроля ошибок канала цифровой магнитной записи | 1988 |
|
SU1510007A1 |
Изобретение относится к измерительной технике и может быть использовано при измерении как постоянных во времени, так и переменных механических величин, в частности усилий, давлений, вибраций, крутящих моментов, деформаций и механических напряжений. Целью изобретения является повышение точности. Сущность способа заключается в том, что его осуществляют в течение трех последовательных тактов, в первом из которых преобразователь изолируют от действия внешних механических величин, во втором к преобразователю прикладывают нормированную механическую величину P0, а в третьем - измеряемую механическую величину PX или сумму PX + P0. К электродам кристалла преобразователя прикладывают управляющее напряжение треугольной формы, в положительные и отрицательные полупериоды которого регистрируют его амплитудные значения, соответствующие моментам переключения направления поляризации кристалла преобразователя, с учетом величин которых по определенным аналитическим выражениям рассчитывают измеряемую механическую величину PX. 1 з.п. ф-лы, 4 ил.
фиг.1
Уст. О
L.
Фаг.2
в
Риъ.З
| Цифровой измеритель усилия | 1975 |
|
SU541094A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ измерения механических величин | 1986 |
|
SU1571436A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
