24
шюл
ел 1 со ND
Ј
О5
Изобретение относится к гидроавтоматике и может быть использовано в гидравлических следящих приводах летательных аппаратов.
Целью изобретения является повышение надежности и упрощение конструкции.
На фиг. 1 изображена схема электрогидравлического усилителя; на фиг. 2 - плоская пружина; на фиг. 3 - резистор с нелинейной характеристикой.
Усилитель содержит операционный усилитель 1 и последовательно включенные диодный ограничитель 2 напряжения, усилитель 3 тока и электромеханический преобразователь 4, соединенный с первым каскадом 5 гидроусилителя 6, второй каскад которого, выполненный в виде золотникового распределителя 7, соединен с каналом 8 подвода, каналом 9 слива и выходными рабочими каналами 10 и 11. Регулируемые потенциометры 12 и 13 снабжены гидроцилиндрами 14 и 15 для привода подвижных контактов 16, 17 и включены в последовательную цепь, средняя точка которой подключена к выходу операционного усилителя 1, а неподвижные контакты (не показаны) подключены к источнику электропитания. Контакты 16 и 17 подключены к диодному ограничителю 2. Гидроцилиндры 14 и 15 снабжены установленными на их штоках 18 и 19 плоскими пружинами 20 и 21, закрепленными по периметру. При этом полости 22 и 23 гидроцилиндров 14 и 15 соединены с каналами 10 и 11, а полости 24 и 25 - с каналом 8. Каскад 5 имеет поворотную заслонку 26, сопла (не показаны) и пружину 27 обратной связи. Потенциометры 12 и 13 могут быть выполнены с нелинейной характеристикой, а пружины 20 и 21 - с переменной жесткостью. Электрогидравлический усилитель работает следующим образом.
При подаче управляющего сигнала на вход операционного усилителя 1 он усиливается усилителем 3 тока и в виде тока управления поступает на электромеханический преобразователь 4, что вызывает перемещение заслонки 26, а затем перемещение золотникового распределителя 7, который перемещается до тех пор, пока заслонка 26, перемещаемая пружиной 27 обратной связи, не занимает нейтральное, относительно сопел, положение. Так как величина перемещения заслонки 26 первого каскада и перемещение золотникового распределителя 7 пропорциональны величине напряжения на выходе из операционного усилителя 1 (или точнее величине управляющего сигнала на входе в операционный усилитель 1), то ограничение величины максимального напряжения на выходе из диодного ограничителя 2 напряжения является и ограничением максимальной величины перемещения золотникового распределителя 7. Одновременно расход через последний при максимальном сигнале управления зависит также от нагрузки (в виде перепада давлений) на выходе. Для того, чтобы расход на выходе не зависел от нагрузки, необходимо, чтобы величина хода золотникового распределителя 7
была пропорциональна не только величине управляющего сигнала, но и величине л/АРв -АР„ , где ДРвх - перепад давления в каналах 8 и 9, ДРН - перепад давления в каналах 11. Это достигается тем, что величина ограничения выходного напряжения U
диодного ограничителя 2 является перемен- нрй величиной, пропорциональной величине . Для чего величина ограничения выходного напряжения диодного ограничителя 2 при максимальном сигнале управления настраивается в рабочей точке таким образом, чтобы обеспечить требуемый расход при заданной величине нагрузки на входе.
Величина ограничения выходного напряжения и величина хода золотникового рас0 пределителя 7 должны уменьшаться при уменьшении нагрузки. Это достигается тем, что в полость 22 подается входное давление, а в полость 24 - давление в канале 10 выхода (или 11). В этом случае при работе
5 под максимальной нагрузкой давление в полости 24, максимальное, перепад давления минимальный, а шток 18 втянут на максимальную величину, что обеспечивает максимальное значение напряжения на выходе из диодного ограничителя 2 за счет перемеще0 ния подвижного контакта 16. При уменьшении нагрузки давление в полости 24 уменьшается, перепад давлений между полостями 22, 24 и 23, 25 увеличивается, шток 18 выдвигается на величину, пропорциональную величине т/АРвх -ДР„ При этом про5 пррциональность напряжения U величине л АРВх-ДРН обеспечивается за счет переменной жесткости пружин 20 и 21 или за счет нелинейной характеристики потенциометров 12 и 13.
Таким образом, в любой точке расходной характеристики ЭГУ при максимальном сигнале управления перемещение золотникового распределителя 7 пропорционально не только величине управляющего сигнала, но и величине, равной - /АРех-ДРН , что обеспе5 чивает независимость расхода в каналах 10 и 11 от величины нагрузки.
Формула изобретения
1. Электрогидравлический усилитель, со- 0 держащий операционный усилитель и последовательно включенные диодный ограничитель напряжения, усилитель тока и электромеханический преобразователь, соединенный с первым каскадом гидроусилителя, второй каскад которого соединен с каналами под- 5 вода, слива и рабочими каналами, а также регулируемые потенциометры, неподвижные контакты которых подключены к источнику электропитания, а подвижные контакты свя0
заны с гидроусилителем и диодным ограничителем, отличающийся тем, что, с целью повышения надежности и упрощения конструкции, каждый потенциометр снабжен гидроцилиндром для привода подвижного контакта, потенциометры включены в последовательную цепь, средняя точка которой подключена к выходу операционного усилителя, каждый гидроцилиндр снабжен установленной на штоке и закрепленной по периметру
плоской пружиной, при этом одна полость каждого гидроцилиндра соединена с рабочим каналом, а другая - с каналом подвода.
2.Усилитель по п. 1, отличающийся тем, что плоская пружина выполнена с переменной жесткостью.
3.Усилитель по п. 1, отличающийся тем, что потенциометры выполнены с нелинейной характеристикой.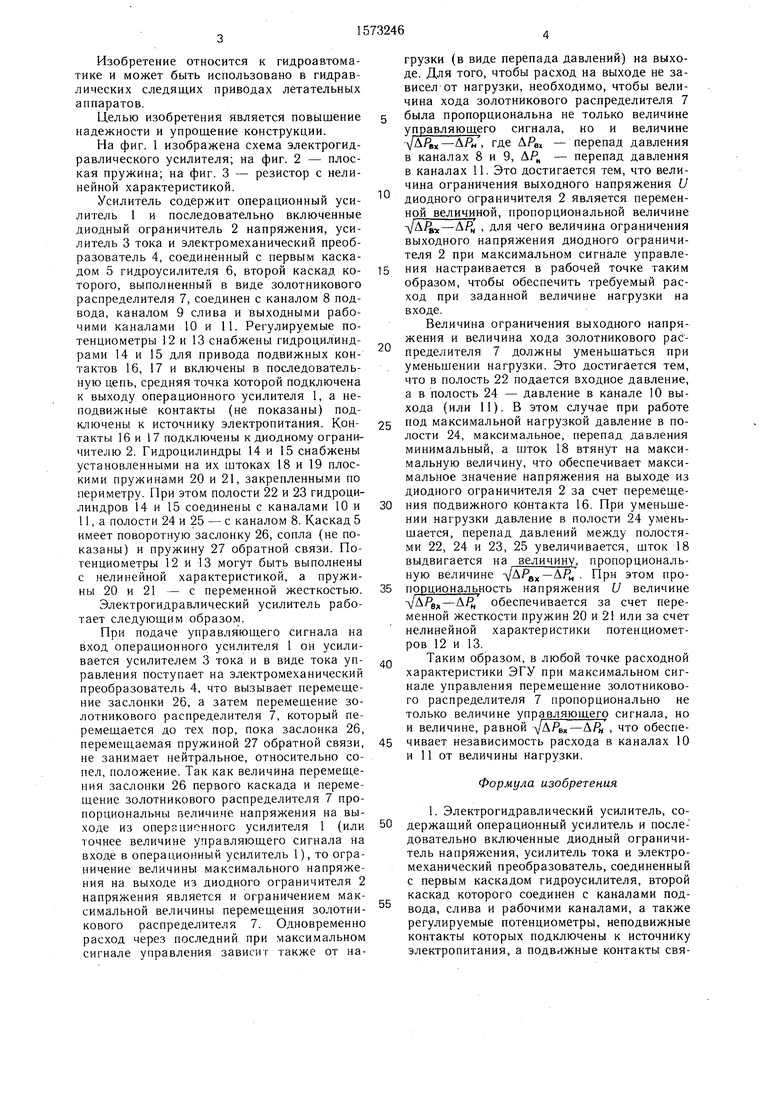
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ РЕГУЛИРУЕМЫМ АКСИАЛЬНО-ПОРШНЕВЫМ НАСОСОМ | 1991 |
|
RU2018708C1 |
| Электрогидравлический следящий привод | 1989 |
|
SU1754918A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С ТРЕХКАСКАДНЫМ ЭЛЕКТРОГИДРОУСИЛИТЕЛЕМ | 2012 |
|
RU2505715C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ СО СТРУЙНЫМ УСИЛИТЕЛЕМ В ПЕРВОМ КАСКАДЕ | 2015 |
|
RU2594094C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| Стенд для испытания блока цилиндров двигателя внутреннего сгорания на усталость | 1984 |
|
SU1268985A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ С ЦИФРОВЫМ УПРАВЛЕНИЕМ | 2015 |
|
RU2599098C1 |
| Электрогидравлический вибростенд | 1972 |
|
SU697749A1 |

Изобретение относится к гидроавтоматике и может быть использовано в гидравлических следящих приводах летательных аппаратов. Целью изобретения является повышение надежности и упрощение конструкции. При подаче сигнала на вход операционного усилителя 1 ток управления поступает на электромеханический преобразователь 4. Золотниковый распределитель 7 перемещается до тех пор, пока заслонка 26 не займет нейтральное положение. Для того, чтобы расход в каналах 10, 11 не зависел от нагрузки, необходимо, чтобы величина хода распределителя 7 была пропорциональна √ΔРвх-ΔРн , где ΔРвх - перепад давления в каналах 8, 9: ΔРн - перепад давления в каналах 10,11. Пропорциональность напряжения на выходе ограничителя 2 и, следовательно, расхода в каналах 10,11 значению √ΔРвх - ΔРн обеспечивается за счет переменной жесткости пружин 20,21 или нелинейной характеристики потенциометров 12,13. 3 ил.
| Электрогидравлический следящий привод | 1984 |
|
SU1245768A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
