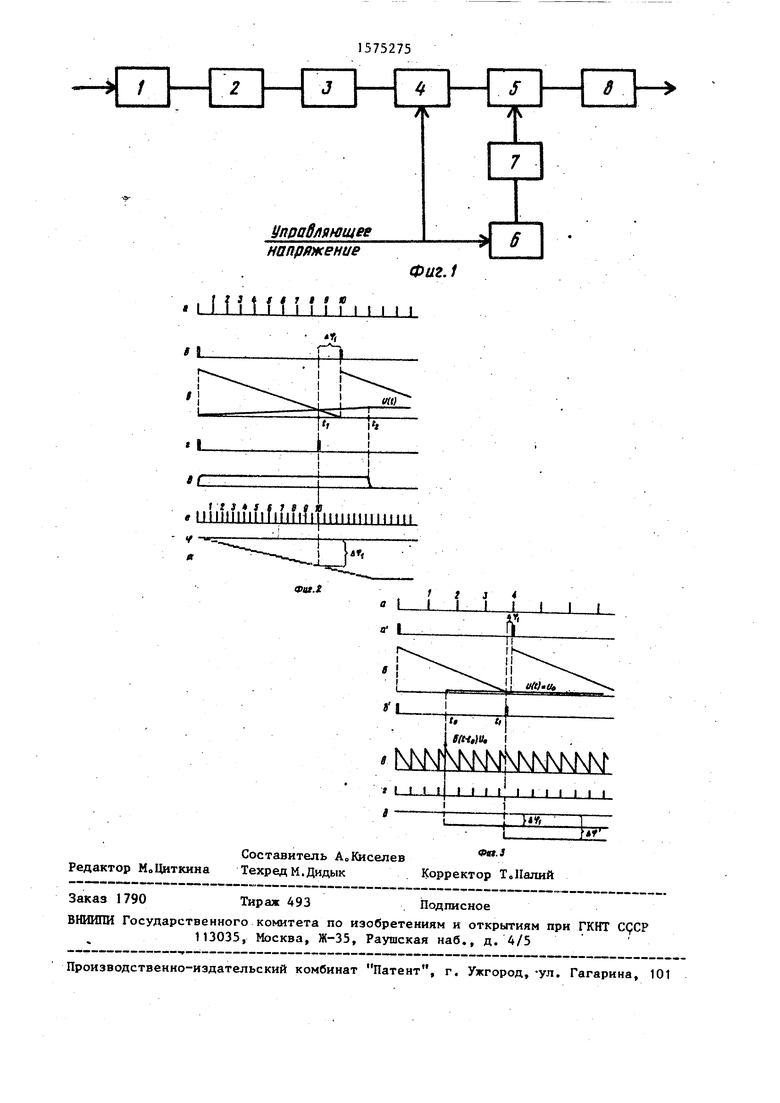
стоянкой времени Ји ; е - временная диаграмма напряжения выходных импульсов « ж - гистограмма фазового сдвига выходных импульсов в зависимости от времени); на фиг.З - временные диаграммы, поясняющие способ при (а- временная диаграмма напряжения синхроимпульсов с частотой Јс; a - временная диаграмма напряжения синхроимпульсов после деления частоты; б - график зависимости от времени периодического линей- ,но изменяющегося напряжения и напряжения управления; б - временная ди- аграмма напряжения тактовых импульсов; в - график зависимости от времени напряжения квазипериодического сигнала; г - временная диаграмма напряжения выходных импульсов; д - ги- стограммы фазового положения выходных импульсов в зависимости от времени; гистограмма d tf соответствует сдвигу тактового импульса для данного U а гистограмма л tf соответствует фактически воспринятому потребителем изменению фазы при скачкообразном изменении управляющего напряжения и отсутствии интегрирования о /
торое синхронизируют в определенной фазе синхроимпульсами пониженной частоты (фиго2в)„ При этом период линейного напряжения Т( п Тс„ На фиг.2в в качестве примера изображено линейно падающее напряжение. Сформированное описанным образом напряжение сравнивают по величине с поступающим извне напряжением управления и в момент ц равенства этих напряжений формируют тактовый импульс (фиг02г)„
Если напряжение управления равно нулю, то тактовый импульс будет син- фазен с каждым n-м синхроимпульсом,, Если напряжение управления не равно нулю, то приращение угла фазового сдвига г) tf1 может превысить период сетевого напряжения, В частности, на фиг. 2 МЧ1,} где и t/ измеряется в долях периода сетевого напряжения„
Напряжение управления дифференцируют, интегрируют с постоянной времени а результат интегрирования линейно преобразуют в частоту, причем начальную фазу этого преобразованного квазипериодического сигнала восстанавливают в момент прихода очередного тактового импульса
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МНОГОЗОННОГО ШИРОТНО-ИМПУЛЬСНОГО УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2000 |
|
RU2159951C1 |
| СПОСОБ АСИНХРОННОГО УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2010 |
|
RU2450412C1 |
| СПОСОБ ШИРОТНО-ИМПУЛЬСНОГО РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ НА ВЫХОДЕ СЕТЕВОГО ПРЕОБРАЗОВАТЕЛЯ | 1996 |
|
RU2110136C1 |
| Способ измерения нелинейных искажений растра на экране телевизионного приемника | 1990 |
|
SU1757126A1 |
| СПОСОБ ДЕМОДУЛЯЦИИ СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2271071C2 |
| СПОСОБ ВРЕМЯИМПУЛЬСНОГО ПРЕОБРАЗОВАНИЯ ПОСТОЯННОГО НАПРЯЖЕНИЯ В КОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2015618C1 |
| Способ получения фазо-импульсного модулированного сигнала | 1976 |
|
SU775834A1 |
| Калибратор напряжения | 1984 |
|
SU1244646A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ПРИ ПОМОЩИ МИКРОПРОЦЕССОРНОЙ СИСТЕМЫ | 1996 |
|
RU2107982C1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ПРИЕМНИКА ШУМОПОДОБНЫХ СИГНАЛОВ | 1980 |
|
SU1840647A1 |
Изобретение относится к преобразовательной технике и может быть использовано при реализации систем управления трансформаторно-тиристорными регуляторами. Целью изобретения является расширение функциональных возможностей за счет увеличения диапазона управления фазовым положением импульсов. Указанная цель достигается тем, что формируют синхроимпульсы в фиксированной фазе сетевого напряжения, делят частоту этих синхроимпульсов на N (где N - целое число), формируют линейно изменяющееся напряжение, это напряжение синхронизуют синхроимпульсами пониженной частоты, подают напряжение управления, сравнивают это напряжение с линейно изменяющимся напряжением и в момент равенства этих напряжений формируют тактовый импульс, дифференцируют напряжение управления, результат дифференцирования интегрируют с постоянной времени, равной частному от деления периода сетевого напряжения на число выходных импульсов за период сетевого напряжения, а затем линейно преобразуют в частоту квазипериодического сигнала, причем начальную фазу квазипериодического сигнала восстанавливают в момент прихода очередного тактового импульса, а выходные импульсы формируют в фиксированной фазе квазипериодического сигнала. 3 ил.
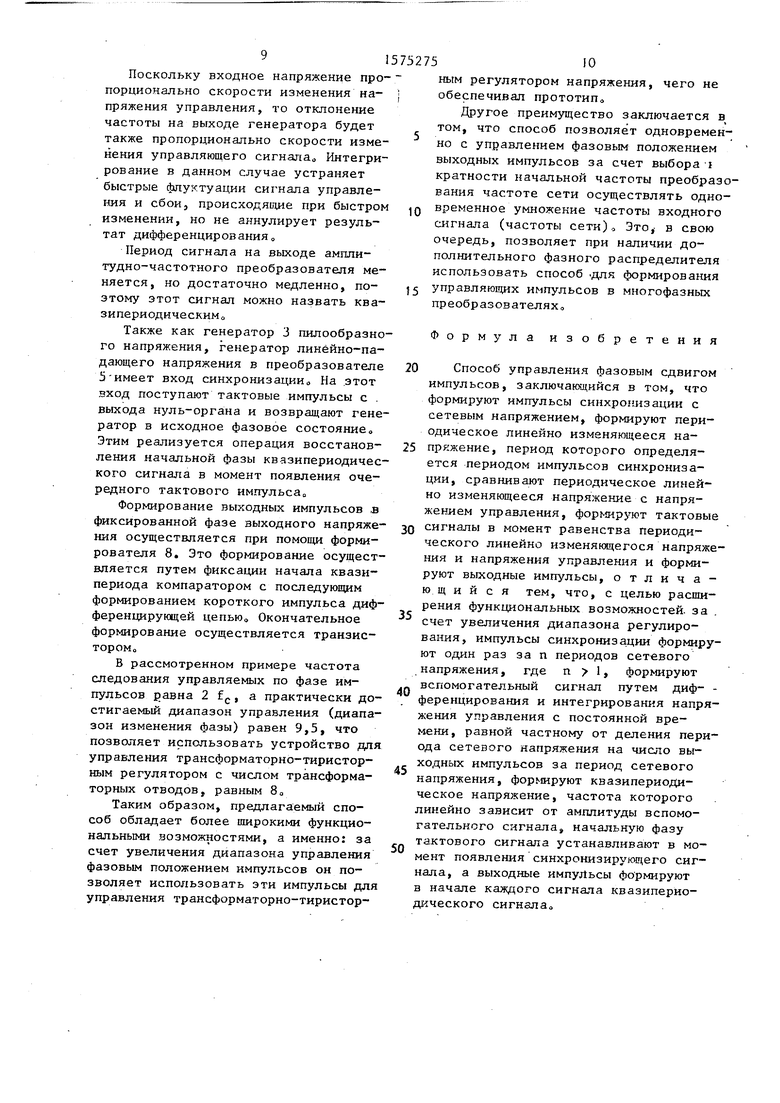
Устройство,реализующее способ содер- д При этом частота преобразования f ffp ,
жит (фиг«1) последовательно соединенные синхронизатор 1,делитель 2 частоты и генератор j пилообразного напряжения, выход которого соединен с одним
соответствующая нулевой скорости изменения сигнала управления, выбирается равной f пр mfc, где fc - частота сети, am- целое положительное
входом нудь-органа 4, амплитудно-час- число0 В этом случае, если скорость
тотный преобразователь 5, тактовый вход которого соединен с выходом нуль- органа 4, последовательно соединенные дифференциатор 6 и интегрирующую цепь 7, выход которой подключен на вход амплитудно-частотного преобразователя 5, причем управляющее напряжение поступает на другой вход нуль-органа 4 и на вход дифференциатора 6, вход синхронизатора 1 является входом устройства, а выход формирователя 8, входом подключенного к выходу амплитудно-частотного преобразователя- 5 - его выходом0
В предлагаемом способе первоначально в определенной фазе сетевого напряжения формируют синхроимпульсы, которые будут следовать с периодом Тл сетевого напряжения (фиг02а)0 Затем делят частоту следования синхроимпульсов в п раз, например, выделяя каждый n-й импульс (на фиг.26 п 10) Одновременно формируют периодическое линейно изменяющееся напряжение, ко40
изменения сигнала управления действи тельно равна нулю, то в промежутках между тактовыми импульсами квазипериодический сигнал будет изменяться синхронно с синхроимпульсами сети, ф зу формирования выходных импульсов необходимо выбрать фиксированной по отношению к квазипериодическому сигналу,, Например ее можно выбрать так 45 чтобы один из m выходных импульсов был синфазен с синхроимпульсом сети,, Эта синфазность будет соблюдаться и в любой момент времени, т0к0 незначительный набег фазы, связанный с не точностью установки начальной частот преобразования, будет устраняться в момент восстановления начальной фазы квазипериодического сигнала тактовыми импульсами через каждые п периодов сетио
Изменение сигнала управления вызывает сдвиг тактового импульса на 4Ц, , а после дифференцирования сиг- нача управления получается сигнал,
50
55
соответствующая нулевой скорости изменения сигнала управления, выбирается равной f пр mfc, где fc - частота сети, am- целое положительное
0
изменения сигнала управления действительно равна нулю, то в промежутках между тактовыми импульсами квазипериодический сигнал будет изменяться синхронно с синхроимпульсами сети, фазу формирования выходных импульсов необходимо выбрать фиксированной по отношению к квазипериодическому сигналу,, Например ее можно выбрать так, 5 чтобы один из m выходных импульсов был синфазен с синхроимпульсом сети,, Эта синфазность будет соблюдаться и в любой момент времени, т0к0 незначительный набег фазы, связанный с неточностью установки начальной частоты преобразования, будет устраняться в момент восстановления начальной фазы квазипериодического сигнала тактовыми импульсами через каждые п периодов сетио
Изменение сигнала управления вызывает сдвиг тактового импульса на 4Ц, , а после дифференцирования сиг- нача управления получается сигнал,
0
5
пропорциональный скорости изменения сигнала управления (фиг.2д), При этом изменение напряжения управления от нуля до максимального значения линейно изменяющегося напряжения обеспечивает фазовый сдвиг выходных импульсов, численно равный п.
Практически изменение сигнала может происходить с любой скоростью, причем быстрое изменение управляющего сигнала может быть- полезным (т.е. связанным с необходимостью быстрого изменения фазы) и паразитным (связанным, например, со случайными флуктуациями управляющего сигнала или коммутационными помехами)„ Поскольку операция дифференцирования формирует напряжение, пропорциональное скорости изменения сигнала управ- ления, то даже небольшие по амплитуде, но быстрые его изменения могут привести к искажению как переходной характеристики способа, так к его регулировочной характеристик. Нафиг03б д показано, к каким последствиям может привести отсутствие операции интегрирования, если в момент t0 происходит скачкообразное изменение сигнала управления,, Как видно из графи- ков, тактовый импульс сдвигается на и в установившемся режиме результирующий фазовый сдвиг также должен равняться Д,„ Но за счет того, что после дифференцирования в момент t - t0 возникает импульс большой амплитуды ( /- функция)} амплитудно-частотное преобразование дает мгновенный фазовый сдвиг на величину Acf ,., Этот сдвиг уже не связан с амплитудой Ue напряжения управления, а зависит от момента времени i его включения. Окончательное изменение фазы после операции формирования выходного импульса будет воспринято потребителем так, как это изображено на фиг„3д ( 4 с/ ) не так, как на фиг.Зд ( ДЦ ). Другими словами, при отсутствии операции интегрирования быстрое изменение управляющего напряжения в рассмотренном случае приводит к искажению переходной характеристики, а также к искажению регулировочной их характеристики флуктуации сигнала, и коммутационные помехи могут привести к аналогичным искажениям
Введение операции интегрирования ограничивает амплитуду сигнала после проведения дифференцирования и делает
,
0 5 0 5 0
5
0
5
0
5
возможным практическое использование способа.
Введение операции интегрирования сигнала управления с постоянной времени Ги Тс/тп после его дифференцирования обеспечивает, с одной стороны монотонность, определяемую способом переходной характеристики (и линейность регулировочной характеристики), с другой стороны, уменьшает вероятность сбоев в фазовом управлении, ТоК. производит фильтрацию флуктуации (шумов) управляющего напряжения и коммутационных помех
Таким образом, предлагаемый способ позволяет расширить диапазон управления фазовым положением импульсов до величины, равной п, и тем самым обеспечить возможность использования способа для формирования управляющих импульсов в транспортно-тиристорных преобразователях, т0е0 позволяет расширить функциональные возможности способа
Деление частоты синхроимпульсов в п раз позволяет в п раз увеличить период линейно изменяющегося напряже- - ния и тем самым расширить диапазон изменения фазового положения тактового импульса.
Синхронизация линейно изменяющегося напряжения синхроимпульсами, следующими с частотой в п раз меньше, чем частота сети, осуществляет привязку момента начала формирования линейно изменяющегося напряжения к фиксированной фазе сетевого напряжения.
Дифференцирование управляющего напряжения формирует сигнал, пропорциональный скорости изменения основного сигнала управления. Такой сигнал необходимо для его дальнейшего преобразования в частоту, непрерывное изменение которой обеспечивает плавный сдвиг по фазе выходного сигнала в промежутках между тактовыми импульсами
Интегрирование продифференцированного сигнала с постоянной времени Ои обеспечивает фильтрацию управляющего напряжения от флуктуационных выбросов и коммутационных помех, которые усиливаются операцией дифференцирования. Кроме того, эта операция обеспечивает монотонность переходной и линейность регулировочной характеристик
,
Линейное преобразование амплитуды сигнала, проинтегрированного с постоянной времени €и , в частоту квазипериодического сигнала обеспечивает заполнение промежутков времени меж ду тактовыми импульсами квазипериодическим сигналом, сдвиг по фазе которого относительно синхроимпульсов зависит от скорости изменения сигнала управления
Восстановление начальной фазы квазипериодического сигнала тактовыми импульсами обеспечивает фазовую синхронизацию квазипериодического сигнала,, Поскольку эта синхронизация осуществляется в широком диапазоне фаз, то и диапазон фазового изменения квазипериодического сигнала относительно синхроимпульсов будет широк„
Формирование выходного сигнала в фиксированной фазе кваэипериодическо- го сигнала обеспечивает фазовую привязку выходного сигнала к квазипериодическому и гарантирует тем самым сохранение выработанных предыдущими операциями фазовых соотношений„
Устройство, реализующее способ, работает следующим образом,,
Сигнал, пропорциональный сетевому напряжению, поступает на вход синхронизатора 1, где преобразуется в последовательность импульсов длительностью 500 мкс, передний фронт которых совпадает с моментом смены полярности входного сигнала с отрицательной на положительную.
Таким образом осуществляется реализация операции.по формированию синхроимпульсов в фиксированной фазе сетевого напряжения. Операция деления частоты синхроимпульсов в 10 раз осуществляется при помощи цифрового делителя частоты с использованием ре
гистра сдвига. Генератор пилообразно- ,, нала в частоту квазипериодического
го напряжения работает на принципе разряда конденсатора током, постоянным по величине, с периодическим возвратом в исходное состояниео Таким образом реализуется операция формирования периодического линейно изменяющегося напряжения. Кроме того, генератор имеет вход синхронизации, позволяющий вернуть его в исходное состояние до момента окончания его собственного периода На вход синхронизации генератора подаются импульсы с выхода делителя частоты, за счет чего и осуществляется реализация операции
50
55
сигнала. Указанное преобразование р ализуется в преобразователе генера ром линейно падающего напряжения, риод которого линейно зависит от вх ного напряженияо При незначительных изменениях периода можно считать,чт и частота колебаний этого генератор зависит от входного напряжения такж линейно. Генератор линейно падающе напряжения отрегулирован так, что частота Ј„„ -t соответствующая нулево му входному напряжению, равна 2 fc а коэффициент амплитудно-частотного преобразования $ 0,5„
5
10
15
20
25
Q
35
40
по синхронизации линейно изменяющегося напряжения о При этом период этого напряжения становится равным 0,2 с„
Последующая операция сравнения напряжения управления, которое подается извне j г. линейно изменяющимся напряжением осуществляется при помощи нуль- органа 4 , В момент равенства напряжений на входах нуль-органа 4 его выводной сигнал мгновенно меняется с + 1 на -10 Здесь же, в .нуль-органе 4, это напряжение дифференцируется на дифференцирующей цепи с С,, 500 мкс и ограничивается. При этом на выходе компаратора появляется импульс, аналогичный импульсу на выходе синхронизатора 1, но сдвинутый относительно последнего по фазе, величина которой- пропорциональнэ напряжению управления,, При этом приращение фазы от одного тактового импульса к другому пропорционально скорости изменения сигнала управления. Диапазон изменения фазового сдвига в данном случае равен 9,5 периодам сетевого напряжения., а коэффициент.преобразования напряжения в фазовый сдвиг 0,53 /В (здесь фазовый сдвиг измеряется в долях периода сетевого напряжения я является безразмерной величиной)„
Одновременно напряжение управления дифференцируется на дифференциаторе 6 с коэффициентом пропорциональности К А- 1 с (операция дифференцирования), затем пропускается через интегрирующую цепь 7с Ји 10 с и коэффициентом пропорциональности К у 1 (операция интегрирования) и поступает на вход амплитудно-частотного преобразователя 5 Этот преобразователь осуществляет операцию преобразования амплитуды проинтегриро- -- ванного с постоянной времени
2„ сиг0
5
сигнала. Указанное преобразование реализуется в преобразователе генератором линейно падающего напряжения, период которого линейно зависит от входного напряженияо При незначительных изменениях периода можно считать,что и частота колебаний этого генератора зависит от входного напряжения также линейно. Генератор линейно падающего напряжения отрегулирован так, что частота Ј„„ -t соответствующая нулевому входному напряжению, равна 2 fc, а коэффициент амплитудно-частотного преобразования $ 0,5„
9157
Поскольку входное напряжение про- порционально скорости изменения на- ( пряжения управления, то отклонение частоты на выходе генератора будет также пропорционально скорости изменения управляющего сигнала,, Интегрирование в данном случае устраняет быстрые флуктуации сигнала управления и сбои, происходящие при быстром изменении, но не аннулирует результат дифференцирования
Период сигнала на выходе амплитудно-частотного преобразователя меняется, но достаточно медленно, поэтому этот сигнал можно назвать квазипериодическим о
Также как генератор J пилообразного напряжения, генератор линейно-падающего напряжения в преобразователе 5 имеет вход синхронизации„ На этот вход поступают тактовые импульсы с выхода нуль-органа и возвращают генератор в исходное фазовое состояние Этим реализуется операция восстановления начальной фазы квязипериодичес- кого сигнала в момент появления очередного тактового импульса
Формирование выходных импульсов s фиксированной фазе выходного напряжения осуществляется при помощи формирователя 8. Это формирование осуществляется путем фиксации начала квазн- периода компаратором с последующим формированием короткого импульса дифференцирующей цепью Окончательное формирование осуществляется транзистором
В рассмотренном примере частота следования управляемых по фазе импульсов равна 2 fc, а практически достигаемый диапазон управления (диапазон изменения фазы) равен 9,5, что позволяет использовать устройство для управления трансформаторно-тиристор- ным регулятором с числом трансформаторных отводов, равным 8
Таким образом, предлагаемый способ обладает более широкими функционал ьными возможностями, а именно: за счет увеличения диапазона управления фазовым положением импульсов он позволяет использовать эти импульсы для управления трансформаторно-тиристор10
ным регулятором напряжения, чего не обеспечивал прототип
Другое преимущество заключается в том, что способ позволяет одновремен
но с управлением фазовым положением выходных импульсов за счет выбора i кратности начальной частоты преобразования частоте сети осуществлять одновременное умножение частоты входного сигнала (частоты сети) Это, в свою очередь, позволяет при наличии дополнительного фазного распределителя использовать способ длк формирования управляющих импульсов в многофазных преобразователях
20
5
0
5
0
5
0
Формула изобретения
Способ управления фазовым сдвигом импульсов, заключающийся в том, что формируют импульсы синхронизации с сетевым напряжением, формируют периодическое линейно изменяющееся напряжение, период которого определяется периодом импульсов синхронизации, сравнивают периодическое линейно изменяющееся напряжение с напряжением управления, формируют тактовые сигналы в момент равенства периодического линейно изменяющегося напряжения и напряжения управления и формируют выходные импульсы, отличающийся тем, что, с целью расширения функциональных возможностей за счет увеличения диапазона регулирования, импульсы синхронизации формируют один раз за п периодов сетевого напряжения, где п 1, формируют вспомогательный сигнал путем диф- - ференцирования и интегрирования напряжения управления с постоянной времени, равной частному от деления периода сетевого напряжения на число выходных импульсов за период сетевого напряжения, формируют квазипериодическое напряжение, частота которого линейно зависит от амплитуды вспомогательного сигнала, начальную фазу тактового сигнала устанавливают в момент появления синхронизирующего сигнала, а выходные импульсы формируют в начале каждого сигнала квазиперио- дкческого сигнала
| Писарев А0Л0, Деткин Л.П„ Управление тиристорнымя преобразователямип М„: Энергия, 1975, с,260/ Руденко В0С0, Сенько В„И., Чи- женко И.Мо Основы преобразовательной техники М„: Высшая школа, 1980, с„4020 |
