И-зобретение относится к электротехнике и может быть использовано в разном электроинструменте для разрушения строительных материалов
Целью изобретения является умень- шение механических вибраций на корпусе.
На фиг о 1 показана схема предлагаемого устройства; на фиг. 2 и 3 - временные диаграммы работы.
Электропривод содержит катушку 1 прямого хода, катушки 2 обратного хода с магнитопроводом 3, находящимся на упоре 4, боек 5, рабочий инструмент 6, источник 7 переменного напряжения, подключенный к катушке 2 обратного хода через силовой тиристор 8 и через силовой тиристор 9 к катушке 1 прямого хода Формирователь 10 управляющих импульсов, вход кото- рого соединен с источником переменного напряжения, через датчик 11 верхнего положения соединен с управляющим электродом тиристора 8 и через датчик 12 нижнего положения и датчик 13 на- правления движения с управляющим электродом тиристора 9. Датчик 12 нижнег положения расположен от упора 4 на расстоянии h, равном или большем
ут - у ,
где V,. - максимальная возможная ско- рость ударного узла при движении вниз на уровне датчика нижнего положения; Т - период питающей сети; tjj, - длитепьность управляющего импульса о
Датчик нижнего положения 12 подключает формирователь 10 к тиристору катушки 9 прямого хода при движении магнитопровода от места установки датчика вниз до упора, а расстояние h гарантирует исключение ударов магнитопровода об упор, так как за врем Т - tqj в катушку j рабочего хода обязательно будет подан силовой электрический импульс.
Q
5 о 5
5
0
5
Датчик 11 верхнего положения находится на расстоянии 1 от датчика 12 нижнего положения, равном или большем
, V-r V где V - максимальная скорость удар- ного узла при подходе к датчику верхнего положения; Т - длительность управляющего
импульса;
g - ускорение свободного падения .
Установка датчика 11 на расстоянии 1 от датчика 12 исключает подачу одной и той же полуволны питающего напряжения в катушки рабочего и холостого хода„ Одновременная подача электрических импульсов в катушки электромагнитного двигателя снижает энергетические показатели„
Конкретное место установки датчиков положения магнитопровода, зависящее от соотношений масс якоря и магнитопровода, скорости якоря и магнитопровода, для каждого конкретного электромагнитного двигателя ви- бирается или рассчитывается отдельно, а в качестве датчиков положения могут быть использованы фотоконтактные или магнитные датчики положения.
Датчик 13 направления движения подключает выход формирователя 10 к управляющему электроду тиристора рабочего хода 9 при нулевой скорости ударного узла и при перемещении его в сторону рабочего инструмента„ При движении ударного узла вверх с помощью датчика 13 направления выход формирователя 10 отключается от управляющего электрода тиристора 9 рабочего хода, В качестве датчика 13 направления может быть использован контактный датчико
Формирователь 10 запускающих импульсов может быть выполнен, например, на диодах 14-16, дннисторах 17 и 18, емкостях 19 и 20, тиристоре
21, стабилитроне 22 и резисторах 23 и 24 (фиг „ 10 о
Электропривод работает следующим образом
В исходном состоянии магнитопро- вод находится на упоре 4, а боек 5 - на инструменте 6. Датчики нижнего положения 12 и направления 13 подключают выход формирователя 10 к управляющему электроду тиристора 9 прямого хода Начальный рабочий зазор катушки прямого хода выбирается таким образом, чтобы при подаче элект
хода электромагнитного двигателя на устойчивый режим работы. При срабатывании датчика 11 верхнего положения (фиг. 2, t2) в катушку 2 холостого хода подаются электрические импульсы, в результате чего боек 5 приходит в положение, соответствующее номинальному рабочему воздушному зазору в катушке 1 прямого хода. При достижении магнитопровода верхнего положения (фиг„ 2, t), датчик 13 направления подключает выход формирователя к управляющему электроду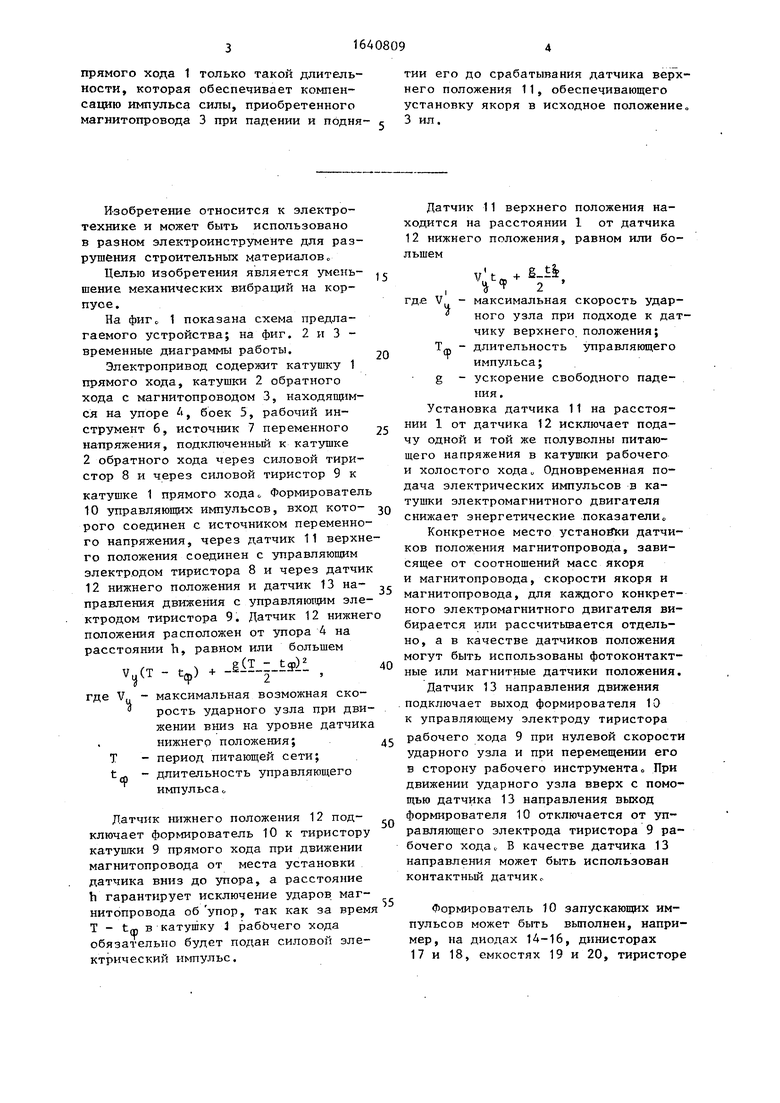


| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод возвратно-поступательного движения | 1986 |
|
SU1337983A1 |
| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ С ПРИВОДОМ ОТ ЛИНЕЙНОГО ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ | 2016 |
|
RU2630026C1 |
| СКВАЖИННЫЙ СЕЙСМОИСТОЧНИК | 2017 |
|
RU2642199C1 |
| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ | 2004 |
|
RU2295025C2 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1432679A1 |
| ЭЛЕКТРИЧЕСКИЙ МОЛОТ | 1989 |
|
RU2018652C1 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1394388A1 |
| Скважинный сейсмоисточник | 2020 |
|
RU2753805C1 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1352607A1 |
| Формирователь импульсов тока для питания двухобмоточного двигателя возвратно-поступательного движения | 1988 |
|
SU1598099A1 |

Изобретение относится к электротехнике и может быть использовано в разном электроинструменте для разрушения строительных материалов. Цель - уменьшение механических вибраций на корпусе о Устройство содержит катушки прямого хода 1 и обратного хода 2 в пазах магнитопровода 3. Система управления снабжена датчиком 13 направления движения и контактными датчиками верхнего 11 и нижнего положения 12 магнитопровода 3 относительно корпуса. Выход формирователя 10 импульсов через датчики 13 и 12 соединен с управляющим электродом тиристора 9 катушки прямого хода 1, а через датчик 11 - с управляющим электродом тиристора 8 катушки обратного хода. Место установки датчика 12 исключает удары узла магнитопровода 3 по корпусу, а длительность импульсов с формирователя 10 обеспечивает подачу электрических импульсов в катушку (Л
рического импульса в катушку 1 прямо- jr тиристора 9 рабочего хода, поэтому
при опускании магнитопровода до уро ня установки датчика 12 нижнего пол жения (фиго 2, tg.) включается катуш ка 1 прямого хода Одновременно под
го хода магнитопровод поднялся на высоту, при падении с которой до места установки датчика 12 нижнего положения магннтопровод набрал импульс силы, равный половине импульса силы, приобретенного якорем после подачи электрического импульса в катушку t прямого хода. Если в момен включения устройства напряжение питающей сети имеет отрицательное значение или положительные полярности недостаточной длительности, не обеспечивающей устойчивый запуск электромагнитного двигателя, то запуск электромагнитного двигателя осуществляется только в следующую положительную полуволну питающего напряжения Это достигается тем, что формирователь 10 генерирует запускающие импульсы длительностью tcp только при, увеличении напряжения питающей сети„
При поступлении управляющего импульса с формирователя 10 через датчики направления 13 и нижнего положения 12 на управляющий электрод тиристора рабочего хода 9 (фиг. 2, tj) в катушку 1 рабочего хода подается электрический импульс, в результате чего боек 5 остается на инструменте 6, а магнитопровод начинает движение вверх0 При движении вверх датчик 13 направления движения отключает выход формирователя 10 от управляющего электрода тиристора 9 рабочего хода, поэтому до срабатывания датчика 11 верхнего положения управляющие импульсы на тиристоры 8 и 9 не поступают. Использование одного датчика 12 нижнего положения привело бы к повторным подачам управляющих импульсов на тиристор 9 рабочего хода в пусковом режиме и к ликвидации возможности вы0
5
0
5
при опускании магнитопровода до уровня установки датчика 12 нижнего положения (фиго 2, tg.) включается катушка 1 прямого хода Одновременно пода0 ча электрических импульсов в катушки прямого 1 и обратного хода 2 исключается, так как при опускании магнитопровода ниже места установки датчика 11 верхнего положения отключает5 ся выход формирователя 10 от тиристора 8 холостого хода
При подаче электрического импульса в катушку 1 прямого хода боек 5 наносит удар по инструменту 6, магнитопровод поднимается вверх и рабочий
цикл повторяется,
i
Незначительное колебание времени подъема и опускания мягнитопровода вследствие колебаний напряжения питающей сети не приводит к снижению устойчивости работы, так как изменение времени движения ударного узла компенсируется за счет изменения длительности напряжения, прикладываемого к катушке 1 рабочего хода. Так, при увеличении напряжения питающей сети магнитопровод получает больший импульс силы и время его подхода к датчику 11 нижнего поло5 жения (фиг. 3, t4) увеличивается относительно времени при номинальном напряжении (фиг„ 3, t3). Увеличение времени движения магннтопро- вода в пределах длительности импульса
Q формирователя 10 (фиг0 3, Ц- ts) приводит к тому, что длительность напряжения, приложенного-к катушке t рабочего хода уменьшится, а кинетическая энергия падающего магнитопровода возрастает. Поэтому в последующий цикл магнитопровод поднимается на меньшую высоту, время его движения уменьшается и к моменту подхода магнитопровода к датчику 12 нижнего
положения (фиго 3, tj,) он имеет меньшую кинетическую энергию. Длительность напряжения в катушке рабочего хода в данном цикле увеличивается за счет уменьшения времени движения, а магнитопровод поднимается на большую высоту. Уменьшение в незначительных пределах питающего напряжения приводит к аналогичным колебаниям магнитопроводао Таким образом, магнитопровод осуществляет колебательные движения относительно установившегося режима работы при постоянной частоте ударов
При значительном увеличении времени подъема и опускания магнитопровода (фиг о 3, ), например, из- за существенного увеличения напряжения питающей сети или отклонения электромагнитной машины от вертикального положения, датчик 12 нижнего положения срабатывает в момент времени, когда отсутствует напряжение на выходе формирователя 10 импульсов В этом случае силовой электрический импульс в катушку прямого хода 1 подается в следующий период питающего напряжения, что приводит к уменьшению частоты ударов, но не к потере устойчивости работы. Магнитопровод в данном случае получает большую кинетическую энергию, поэтому реакция катушки прямого хода поднимает его на меньшую высоту и магнитопровод к моменту следующего срабаты- вания датчика 12 нижнего положения имеет кинетическую энергию меньше, чем в установившемся режиме работы. Место установки датчика 12 исключает удары магнитопровода узла по корпусу, а длительность импульсов с формирователя 10 обеспечивает подачу электрических импульсов в катушку
1, прямого хода только такой длитель
0
5
5
5
0
5
0
0
ности, которая обеспечивает компенсацию импульса силы приобретенного магнитопровода при падении и поднятии его вверх до срабатывания датчика верхнего положения, обеспечивающего установку якоря в исходное положение„
При использовании электропривода улучшаются условия эксплуатации благодаря уменьшению вибраций корпуса, что особенно необходимо в ручном инструменте.
Формула изобретения
Электропривод ударного действия, включающий электромагнитный двигатель возвратно-поступательного движения, содержащий корпус с установленным в нем с возможностью перемещения вдоль корпуса магнитопроводом с пазами, катушки прямого и обратного хода, боек и систему управления, содержащую источник переменного напряжения, два тиристора и формирователь импульсов управления, причем катушки прямого и обратного хода подключены через тиристоры к источнику переменного напряжения, отличающий- с я тем, что, с целью уменьшения механических вибраций на корпусе, катушки прямого и обратного хода установлены в пазах магнитопровода, а система управления снабжена датчиком направления движения и контактными датчиками верхнего и нижнего положений магнитопровода относительно корпуса, причем выход формирователя импульсов через датчик направления движения и датчик нижнего положения соединен с управляющим электродом тиристора катушки прямого хода и через датчик верхнего положения с управляющим электродом тиристора катушки обратного хода.
Ґг Ъ i5 Фиг.З
Фиг. 2
| Устройство для управления двухобмоточным двигателем | 1974 |
|
SU655056A1 |
| Электромагнитная машина ударного действия | 1986 |
|
SU1315287A1 |
