ел С
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения положения подвижного элемента шагового двигателя | 1988 |
|
SU1577067A1 |
| ШАГОВЫЙ ЭЛЕКТРОПРИВОД | 1988 |
|
RU2076451C1 |
| Способ формирования последовательности импульсов для управления шаговым двигателем и устройство для его осуществления | 1987 |
|
SU1603347A1 |
| Вискозиметр | 1990 |
|
SU1758512A1 |
| Стенд для измерения угловых моментных характеристик шаговых электродвигателей | 1987 |
|
SU1636813A1 |
| Устройство для регулирования межэлектродного зазора при электрохимической обработке | 1984 |
|
SU1296333A1 |
| ШАГОВЫЙ ДВИГАТЕЛЬ С ДАТЧИКОМ ШАГОВ | 1994 |
|
RU2085020C1 |
| Система для автоматического числового управления координатными перемещениями при обработке изделий микроэлектроники | 1990 |
|
SU1835534A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДОСТИЖЕНИЯ МЕХАНИЧЕСКОГО УПОРА ЭЛЕКТРОПРИВОДОМ С ДВУХОБМОТОЧНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2725619C1 |
| Устройство управления шаговым двигателем | 1984 |
|
SU1259219A1 |


Использование: в устройствах для управления шаговыми двигателями в прецизионных электроприводах. Сущность: в устройстве для определе ния положения подвижного элемента шагового двигателя использован реверсивный счетчик и введен коммутатор, выходом соединенный с реверсивным счетчиком, а входами - соответственно с выходами блока функциональных преобразований, таймера и блока сравнения. В процессе определения положения подвижного элемента шагового двигателя производится непрерывное слежение за его изменением. 4 ил.
Изобретение относится к электротехнике и может быть использовано в системах управления шаговыми электродвигателями в прецизионных электроприводах.
Цель изобретения - увеличение быстродействия определения положения подвижного элемента ШД и уменьшение динамической ошибки измерения положения путем осуществления режима слежения за изменением фазового состояния результирующей ЭДС.
Цель достигается тем, что в устройстве в процессе определения положения подвижного элемента ШД производится непрерывное слежение за его изменением. Для этого в блоке опорного сигнала счетчик импульсов заменен на реверсивный счетчик, дополнительно введен коммутатор с одним информационным входом с двумя управляющими входами и двумя выходами,
причем информационный вход подключен к таймеру, а один выход подключен к суммирующему, другой - к вычитающему входу реверсивного счетчика импульсов, при этом один из управляющих входов коммутатора соединен с выходом блока сравнения, а другой - с управляющим входом функционального преобразователя. При этом опорный сигнал формируется не как функция времени, а как функция рассогласования между величиной результирующего вектора ЭДС и величиной опорного сигнала. Если угол по ложения подвижного элемента ШД ©находится в интервале от 0 до п /4, то сигнал фазового состояния результирующей ЭДС формируется как
00
го о
N3
tg
О)
а сигнал фазового состояния известного вектора как
3Ш2611 . 4
г(0) stgy, (2) Л1рговы преобразователь 2, выход когоро; , л v. го является выходом 16 блока 14, Коммутапричем,если F(e)F(),95yBe 4HBfeT- 1 тор 19 имеет вход 23, соединенный с
ся, а при г(в) г()/ ум 1Ь1йд(еТс;й до уг блока 14, и .другой /.
тех пор, пока не наступит равенство вели- 5 вход 24, соедм«ё|1ны,й с выходом блока 17,
чин вектора результирующей ЭДС и изй ест- , по которому передаётся результат сравненого вектора. v . нияз.наченйй сигналов блоков 13 и 14,
. Если находится в интервале рт л /4 :i V IH a фиг. 3 приводится возможная схема
до и величины векторов формируются коммутатора 19. Он состоит из следующих
соответственно: 10 л йч:е6кйхэлементов; одногоИСКЛЮЧАЮ: .; , . , „ ;: ЩЕЕ ИЛИ, одного НЕ и двух даухвхЬдооЫх
(,(31 элементов И. Импульсы с таймера 18 по сту-. : : v паютнавходы элементов И и в зависимости .
) (4) ртсйгналов на других их входах, поступаю;V .v, 15 ujjiix от элемента ИСКЛЮЧАЮЩЕЕ ИЛИ и ; то при г(в)гО)Р увеличивается.а НЕ, один из них припускает их на выход при т,( 9) г (у), уменьшается до тех .. .+ или - (сложение или вычитание), пор, пока не наступит равенство величин Входы 23 и 24 являются входами злемен- г(0)иг(). . та ИСКЛЮЧАЮЩЕЕ ИЛИ, причем на
Это позволяет формировать плавно 20. вход 24 поступает сигнал результатагсрар- изменяющееся значение р , а не в виде ивния тг(0)с() а на вход 23 сигналГ развертки, что позволяет более точно опре- задающий направление изменения р в за- делить значение динамике, .айсимости от соотношения F( 0) MF.(.y) с
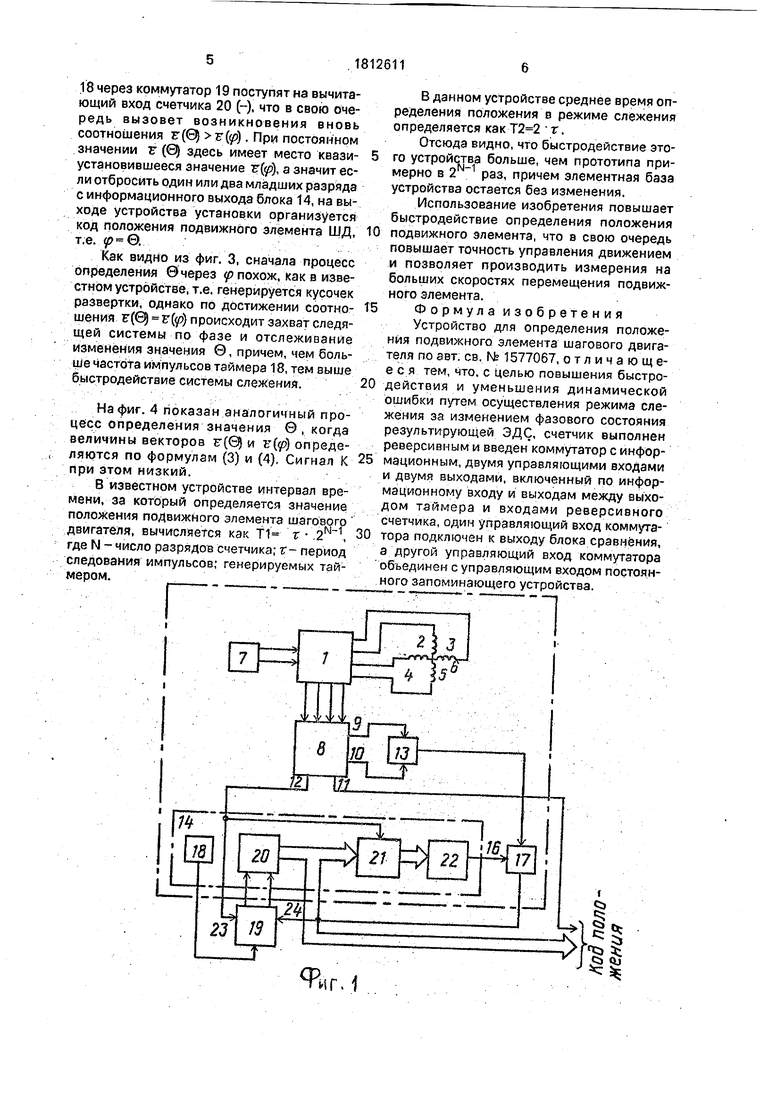
На Фиг. 1 показана блок-схема устрой- учетом функции представления этих вели- , ства для определения положения подвиж- 2 чик tg или ctg.. кого элемента шагового двигателя; на фиг, Устройство работает следующим обра- 2 - схема коммутатора; на фиг. 3 и 4 - диаг- зом. рзммы, поясняющие работу устройства. Выходная величина фазы результируюУстройетво для определения положе- п щей ЭДС в известном устройстве в зависи- ния подвижного элемента шагового двига 30 мости от значения угла 0 в диапазоне от теля содержит блок 1 (фиг. 1) выделения -. я/4 до я/4 получается в виде функции сигналов, соответствующих ЭДС, наводи- F(0) tg0 а в диапазоне от яг/4 до. яг/2 в мых в обмотках 2-5 шагового двигателя 6, виде к (0) ctg 0 . При этом в первом подключенного к блоку 7 усилителя мощно: „ случае опорный сигнал вырабатывает- стей.35 ся в виде функции Ј(#) tg#, а во
. К выходам блока 1 выделения сигналов втором r( y)) ctg . При равенстве подключен блок 8 функциональных преоб- г(у)иг(0) вырабатывается компарато- разователей, состоящий из блоков многокэ ром стробирующий сигнал, указывающий, нэльйых аналоговых коммутаторов и что 0., компараторов, имеющий четыре выхода 9, ° В устройстве механизм получения зна- 10,..11,12. Выходы 9,10 блока 8 соединены чения г{0) остаётся тем же самым, однако с входами блока 13, выполненного в виде процесс выработки сигнала развертки замЈ- делителя напряжений. Выход 11 является ней процессом слежения ф за. величиной информационным выходом устройства, а „. ©путем достижения F(0)-я($. .выход 12 подключен к управляющему входу На фиг. 3 показан процесс Определения блока 14 формирования опорного сигнала, значения угла ©путем подгонки опорного имеющего информационный выход 15, яв- угла р, где значения (0)и г(у) определя- лягащийся также информационным выхо- ются по формулам (1) и (2), причем в начален дом устройства, и другой выход 16, Е(у)) г(0). В этом случае сигнал на управ- связанный с одним из входов блока 17 срав-..ои дяющем входе 23 коммутатора 19 имеет вы- ненйя, второй вход блока tt связан с выхо- соков состояние, а значения сигнала на дом блока 14. Блок 14 формирования входе 24 коммутатора 19, поступающего от опормого сигнала содержит nocneflOBaTeflir блока 17, низкое. Коммутатор 19п0опускает но соединенные таймер 18, коммутатор 19, .импульсы с таймера 18 на суммирующий реверсивный счетчик 20, информационный °° вход счетчика 20 (+). При этом значение выход которого является информационным р возрастает, а значит и растет г (уэ). Этот выходом 15 блока 14, постоянное запомина- процесс идет до тех пор, пока имеет место ,.ющее устройство 21, вход которого является (0) я(р) В случаег( F) сигнал U Управляющим входом блока 14 и цифроана- становится высоким и импульсы с таймера
18 через коммутатор 19 поступят на вычитающий вход счетчика 20 (-), что в свою очередь вызовет возникновения вновь соотношения FfOj) Ј(#). При постоянном значении F (0Ц здесь имеет место квази- установившееся значение 1(у), а значит если отбросить один или два младших разряда с информационного выхода блока 14, на выходе устройства установки организуется код положения подвижного элемента ШД, т.е. .
Как видно из фиг. 3, сначала процесс определения вчерез р похож, как в известном устройстве, т.е. генерируется кусочек развертки, однако по достижении соотношения F(@) ъ(р) происходит захват следящей системы по фазе и отслеживание изменения значения Э, причем, чем больше частота импульсов таймера 18, тем выше быстродействие системы слежения.
На фиг. 4 показан аналогичный процесс определения значения 0, когда величины векторов F(6) и t fy) определяются по формулам (3) и (4), Сигнал К при этом низкий.
8 известном устройстве интервал времени, за который определяется значение положения подвижного элемента шагового двигателя, вычисляется как Т1 т ,, где N - число разрядов счетчика; т- период следования импульсов; генерируемых таймером.
В данном устройстве среднее время определения положения в режиме слежения определяется как С.
Отсюда видно, что быстродействие этого устройства больше, чем прототипа примерно в раз, причем элементная база устройства остается без изменения.
Использование изобретения повышает быстродействие определения положения
подвижного элемента, что в свою очередь повышает точность управления движением и позволяет производить измерения на больших скоростях перемещения подвижного элемента.
Фор мула изобретения
Устройство для определения положения подвижного элемента шагового двигателя по авт. св. № 1577067, отличающе- е с я тем, что. с Целью повышения быстродействия и уменьшения динамической ошибки путем осуществления режима слежения за изменением фазового состояния результирующей ЭДС, счетчик выполнен реверсивным и введен коммутатор с информационным, двумя управляющими входами и двумя выходами, включенный по информационному входу и выходам между выходом таймера и входами реверсивного счетчика, один управляющий вход коммутатора подключен к выходу блока сравнения, а другой управляющий вход коммутатора объединен с управляющим входом постоянного запоминающего устройства.
К 18
2k
t
nJlJl Jl
фиг.З
&
tpuz, 2
Ш1 ПУ--LJ-
Фуе. fy
t
| Устройство для определения положения подвижного элемента шагового двигателя | 1988 |
|
SU1577067A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
