.
6
ел
9
сь
00 4J
Изобретение относится к фотографии, а точнее к аппаратуре, реализующей вторичную обработку фотографических изображений.
Целью изобретения является упрощение конструкции.
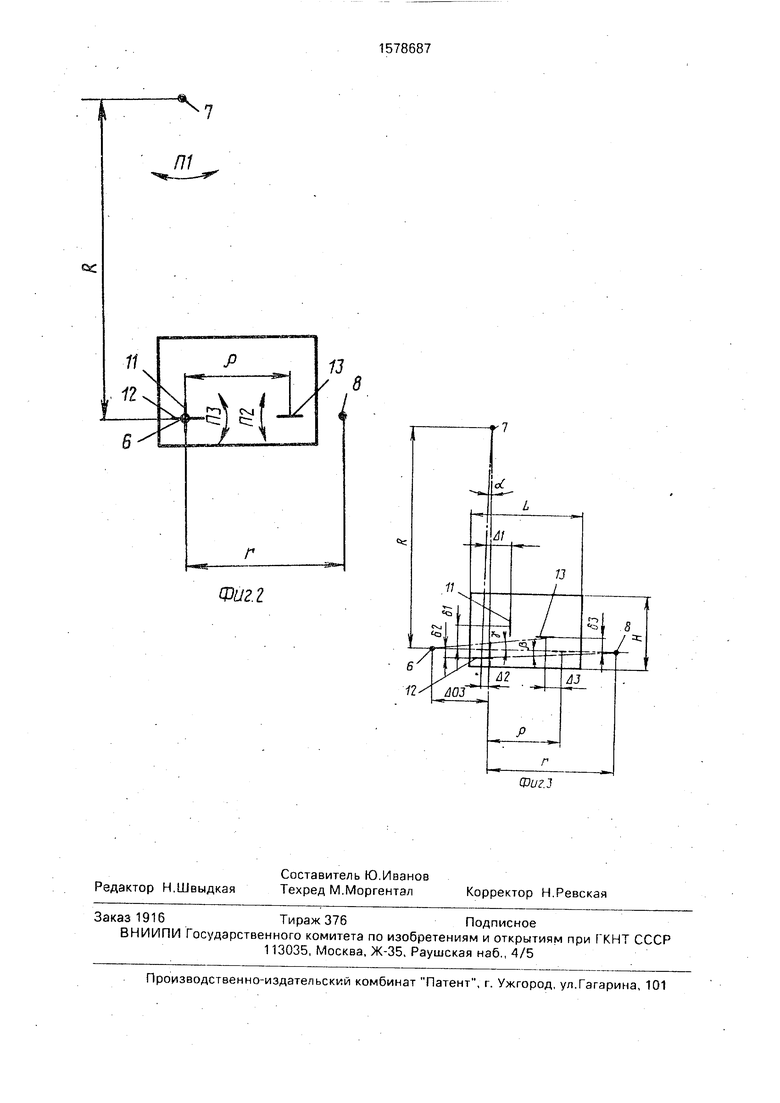
На фиг. 1 схематически изображен механизм точного позиционирования кадровой рамки; на фиг. 2 и 3 - схема процесса совмещения фотографического изображения по меткам.
Механизм точного позиционирования изображения, расположенного в кадровой рамке 1, содержит опорную плату 2 и три подвижные платы 3, 4 и 5, которые соединены между собой осевыми шарнирами с внутренним трением б, 7 и 8 и исполнительными механизмами гидравлических приводов, выполненными в виде металлически силь- фонов 9.С помощью трубопроводов 10 силь- фоны соединяются с механизмами управления перемещениями, которые могут быть вынесены за пределы механизма и выполнены в виде таких же сильфонов и винтовой передачи, управляемой реверсивными электродвигателями или же непосредственно оператором,
Рассмотрим работу предлагаемого механизма позиционирования при совмещении фотографических изображений в кадровой рамке фотоувеличителя Совмещаемые фотографические изображения должны иметь специальные метки совмещения или заменяющие их характерные детали плотности (линиаменты) Вид и взаимное расположение меток (11, 12, 13), как пример, приведены на фиг.2
Механизм позиционирования, несущий изображение в кадровой рамке, устанавливается в фотоувеличитель. Увеличенное изображение негатива наблюдается на фотостоле. Положение первого фотографического изображения (не атива) запоминается с помощью специальных сеток, которые можно установить непосредственно в плоскость фотостола или в специальные контрольные устройства, например типа лупа с сеткой. Сетки контрольных устройств могут иметь вид, например, биссекгора для метки негатива в виде штриха или двух взаимно перпендикулярных биссекторов для метки в виде перекрестья Процесс запоминания положения первого негатива в кадровом окне заключается в совмещении сеток с изображениями соответствующих меток 11,12 и 13 этого негатива. После эк пониро- вания фотобумаги светом первого негатива в кадровое окно устанавливается другой нега-ив, подлежащий совмещению с первым при фотопечати. При этом оказывается, что
изображения идентичных меток совмещения не совпадают с биссекторами по причи не случайного положения негатива в кадровом окне. Далее начинается процесс
позиционирования (совмещения) - установка второго негатива на место первого негатива. Поворот П1 платы 3 позволяет совместить изображение и биссектор по метке 11. При этом наблюдается смещение
0 изображения вдоль биссектора метки 12. Это смещение не вызывает заметного сдвига метки 12 в поперечном направлении. Поворот П2 платы 4 совмещает изображение и биссектор по метке 12 и одновременно
5 смещает изображение вдоль биссектора метки 11, не вызывая заметного ее сдвига в поперечном направлении.
Эта особенность поворотов П1 и П2 позволяет рассматривать их как независимые
0 или вернее квазинезависимые. При выполнении этих операций, изображения (негативы) совмещаются друг с другом в точке, находящейся на пересечении меток 11 и 12, Ось поворота ПЗ платы 5 расположена на
5 пересечении меток 11 и 12. При этом поворот ПЗ, не нарушая совмещения изображений в точке (11 и 12), поворачивает изображение до полного совмещения его с первым негативом в момент совмещения метки
0 13 и ее биссектора.
Следует заметить, что в месте расположения меток 11, 12 и 13 в соответствии с фиг, 2 может че оказаться деталей изображения (линиаментов), пригодных для контроля со5 вмещения изображений Может оказаться также, что шарнир 3 невозможно поместить в точку (11, 12), находящуюся, например, внутри кадровой рамки фотоувеличителя. В этом случае метки 11, 12 и 13 и шарнир 8
0 окажутся смещенными из положений, указанных на фиг. 2, в положения, отмеченные на фиг. 3. В новом расположении меток и шарниров каждый поворот вызывает смещение (наведенное рассогласование) всех
5 меток, однако существует такое взаимное расположение меток и осей шарниров в плоскости кадра, при котором наведенное рассогласованияе меньше величины вызывающего его поворота Эта особенность по0 воротов позволяет построить механизм, реализующий совмещение изображений методом последовательных приближений.
На Фиг. 3 метки 11,12 и 13 расположены на расаоянияхЛ1, Д2,АЗ, (51. 62, d3 от иде5 ального своего положения, указанного на фиг. 2, а шарнир 3 сдвинут из своего положения (фиг 2) на расстояние ДОЗ.
Обозначим индексами а 1,2,0:3, /3 1,/,, У 1.У2, УЗ. угловые положения меток относительно их положения на фиг. 2. а индексами Ri, R2, Вз, п, пг, гзр 1,/92,, радиусы меток 11, 12,13 относительно соответствующих шарниров 1, 2 и 3. Дадим поворотам П1, П2, ПЗ малые угловые приращения d a, d /3, ay. При этом каждое приращение поворотов вызывает соответствующие смещения всех меток.Обозначим Д
П1,ДП2, ДПЗ смещения меток в направлении, перпендикулярном линиаменту под действием своего приращения поворота, d a, d / или d у, а индексами Л П21, Л П31, А П12, ДП32, ДП13, Д П23 - аналогичные смещения меток, наведенные действием чужого поворота. Применением простых тригонометрических соотношений к введенным параметрам можно описать процесс совмещения изображений методом последовательных приближений. Так, например
ДП1 R , da cosa 1 (R - д 1) da; (1)
ДП21 R2 da sina2 Д2 da; (2)
ДП31 R з da sin «3 (p - ДЗ) da; (3)
ДП2 Г2 d/ -cos/ 2 (r+Д2) (4)
ДП 12 n -d/3 61 -d/3; (5)
-d/8-cos/ 3
(r-/) + A3)-d/3;(6)
Ail3 p3 dy- созуз
(ДОЗ+/ -ДЗ) dy;(7)
Д П 13 d 1 d у; (8)
An23 (A03-A2)-dy(9)
Метод последовательных приближений при совмещении изображений работает в случае, если прямые смещения ДП1, ДП2, ДПЗ суммы наведенных рассогласований положений совмещаемой фигуры
ДП1 ДП12+ДП13; ДП2 ДП21+ДП23; +ДП32.
Граничным условием существования мето- да последовательных приближений соответствует равенство прямых и суммарных наведенных смещений. При этом
)da(5l 1 dy; г Д г) бв d а + (ДОЗ + Л 2) dy; A03+/o-A3)dy (/o-A3)da + (r-/9 + A3)dyS.
При равенстве угловых ний da d/3 dy имеем:
перемещеR- J1 2d1;
г + Д2 Д2 + ДОЗ + Д2;
ДШ +р - ДЗ р - ДЗ + г -р + ДЗ;
(R Jr A03 + A2; |ДОЗ г-р + ДЗ;
R 3 -51
г-ДОЗ 02 г-ДОЗ р-ДЗ Д2
р-ДЗ
(10) (И)
с
10
Таким образом, условия существования метода последовательного приближения определяются граничными соотношениями (10) и (11). Физический смысл соотношения
15 (Ю) заключается в том, что если метка 11 выбрана (61 Н) на краю кадра, противоположном шарнирам 2 и 3 (фиг, 3), то наведенные приращения смещений ДП12 и ДП13 максимальны и прямое смещение ДП1 дол20 жно не менее чем в 3 раза превышать смещения П12 или П13. При этом радиус поворота ДП1 должен более чем в 3 раза превышать высоту кадра R 3H,
Однако если положение метки 11 вы25 брано в соответствии с фиг. 2 (), то на величину R не накладывэдется никаких ограничений. Физический смысл соотношения (11) заключается в том, что в соответствии с фиг. 3 метка 13 должна быть
30 ближе к шарниру 2, чем метка 12.
В случае, если положения меток выбраны оптимальным образом ((51 « Н , Д 2 « L, ДЗ « Ц. то в соответствии с выражениями (1)-(9) наибольшее влияние
5 друг на друга оказывают смещения ДП2 и ДПЗ. Можно найти количество шагов метода последовательного приближения при совмещении изображений в предположении, что ось шарнира 3 поворота ПЗ вынесена в
0 соответствии с фиг. Зна расстояние ДОЗ, а метки 11, 12 и 13 расположены в соответствии с фиг. 2. При этом взаимное расположение осей шарниров2 иЗ и меток 12,13 имеет вид, представленный на фиг. 3.
f
Пусть А - максимальная величина начального сдвига совмещаемых изображений. Определим величину Ап - точность совмещения изображений, достигнутая по- 0 еле выполнения п числа шагов по методу последовательного приближения. На первом шаге поворот ПЗ 4 сдвигает метку 12
на величину ДП 23 п + т А а поворот
5 П2, компенсируя этот сдвиг, наводит рассогласование метки 13 на величину
г -р ДОЗ д ..
п + А ПЗ последующих шагах
совмещений рассогласование повторяется.
В таблице приведены выражения для величины поворотов П2 и ПЗ, выполняемые на каждом шаге совмещения изображений от первого по п-го.
Положив оси поворотов П2 и ПЗ симмет- рмчными относительно кадра имеем г -р ДОЗ, тогда
2(п-1)2(п-1)
А f/o + A03 V (г V ) An ДОЗ }(г-р)
(U АОЗ
2(п-1)
(12)
Из соотношения (12) видно, что метод последовательных приближений при совмещении изображений работает тем эффективнее, чем больше величина . |10. т.е. чем
ЛОЗ
ближе к краю кадровой рамки расположены шарниры 2 и 3.
В принципе описанный механизм позиционирования может управляться с помощью винтовых передач, установленных непосредственно на платах механизма.Но в этом случае возникают нежелательные нагрузки на механизм от воздействия оператора на ручки управления. Кроме того, при визуальном контроле совмещения меток в плоскости фотостола или вблизи ее расположение ручек управления непосредственно на механизме позиционирования затрудняет работу оператора. Поэтому возникает необходимость дистанционного управления поворотами кадровой рамки.
Задача дистанционного управления решена применением гидравлической передачи, где ведущее и ведомое звенья приводов выполнены в виде одинаковых металлических сильфонов. Сильфоны имеют малые габариты и вес и вписываются в контсрукцию механизма позиционирования. Металлический трубопровод, соединяющий сильфоны, позволяет расположить ручки управления
на корпусе фотоувеличителя в любом месте, удобном для оператора.
Ф о р м у л а и з о б р е т е н и я 1. Механизм точного позиционирования кадровой рамки, содержащий опорную
плату и расположенную параллельно ей подвижную плату с кадровой рамкой, отличающийся тем, что, с целью упрощения конструкции, между основными платами введены две дополнительные подвижные
платы, параллельные основным, причем все платы последовательно соединены между собой с помощью снабженных приводами осевых шарниров, оси которых, расположенные за пределами кадрового окна, перпендикулярны платам, а точки их пересечения с плоскостью кадрового окна образуют остроугольный треугольник, две вершины которого расположены по разные стороны кадрового окна.
2. Механизм по п. 1,отличающий- с я тем, что приводы осевых шарниров выполнены гидравлическими.
3. Механизм по пп. 1 и 2, о т л и ч а ю- щ и и с я тем, что исполнительные механизмы гидравлических приводов выполнены в виде металлических сильфонов.
т
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ИЗЛУЧЕНИЯ МНОГОКАНАЛЬНОГО ЛАЗЕРА В ЗАДАННЫЕ ТОЧКИ МИШЕНИ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2601505C1 |
| КОНЦЕНТРАТОР ЛУЧИСТОЙ ЭНЕРГИИ | 1971 |
|
SU319149A1 |
| СИСТЕМА ИМИТАЦИИ ВИЗУАЛЬНОЙ ОРИЕНТИРОВКИ ЛЕТЧИКА | 1997 |
|
RU2128860C1 |
| Устройство для пробной печати | 1987 |
|
SU1439521A1 |
| СПОСОБ БЕСКОНТАКТНОГО ОПРЕДЕЛЕНИЯ ПРОЕКЦИОННЫХ РАЗМЕРОВ ОБЪЕКТА И ПОЛУЧЕНИЯ ЕГО ТРЕХМЕРНОЙ МОДЕЛИ | 2005 |
|
RU2311615C2 |
| ПРИБОР ДЛЯ ПОСЛЕДОВАТЕЛЬНОГО ОРИЕНТИРОВАНИЯ АЭРОСНИМКОВ | 1926 |
|
SU7898A1 |
| СПОСОБ И УСТРОЙСТВО СОХРАНЕНИЯ ГЕОДЕЗИЧЕСКОГО НАПРАВЛЕНИЯ | 2013 |
|
RU2555511C2 |
| Датчик перемещения для обучаемой системы управления | 1987 |
|
SU1788469A1 |
| МИКРОФИЛЬМИРУЮЩИЙ АППАРАТ С КАССЕТАМИ | 2001 |
|
RU2201612C2 |
| СОВМЕЩЕНИЕ В РЕАЛЬНОМ ВРЕМЕНИ ДЛЯ ЛЕЧЕНИЯ СОСУДОВ | 2010 |
|
RU2535608C2 |
Изобретение касается аппаратуры, реализующей вторичную обработку фотографических изображений. Цель - упрощение конструкции. Механизм точного позиционирования кадровой рамки содержит четыре платы 2 - 5, при этом плата 2 - опорная (неподвижная), а остальные имеют возможность вращаться вокруг осей 6, 7, 8 с помощью шарниров. Оси шарниров размещены (в исходном положении) за пределами кадрового окна, расположенного в кадровой рамке 1. Оси шарниров перпендикулярны платам и точки их пересечения с плоскостью кадрового окна образуют остроугольный треугольник, две вершины которого расположены по разные стороны кадрового окна. Для поворота плат предусмотрены гидравлические системы с сильфонами 9. Установку кадра производят методом последовательного приближения при поочередном повороте плат, т.е. выбирают на кадре характерные линии, по которым осуществляют его установку. 2 з.п. ф-лы, 3 ил.
| Патент ФРГ N° 3320819, кл G 03 В 21/26,опублик 1984. |
