Изобретение относится к робототехнике и может быть использовано для построения манипуляторов модульной конструкции,,несущих на конечном звене датчик визуальной информации системы технического зрения.
Целью изобретения является повышение надежности за счет обеспечения бесконтактной передачи электроэнергии и сигналов управления.
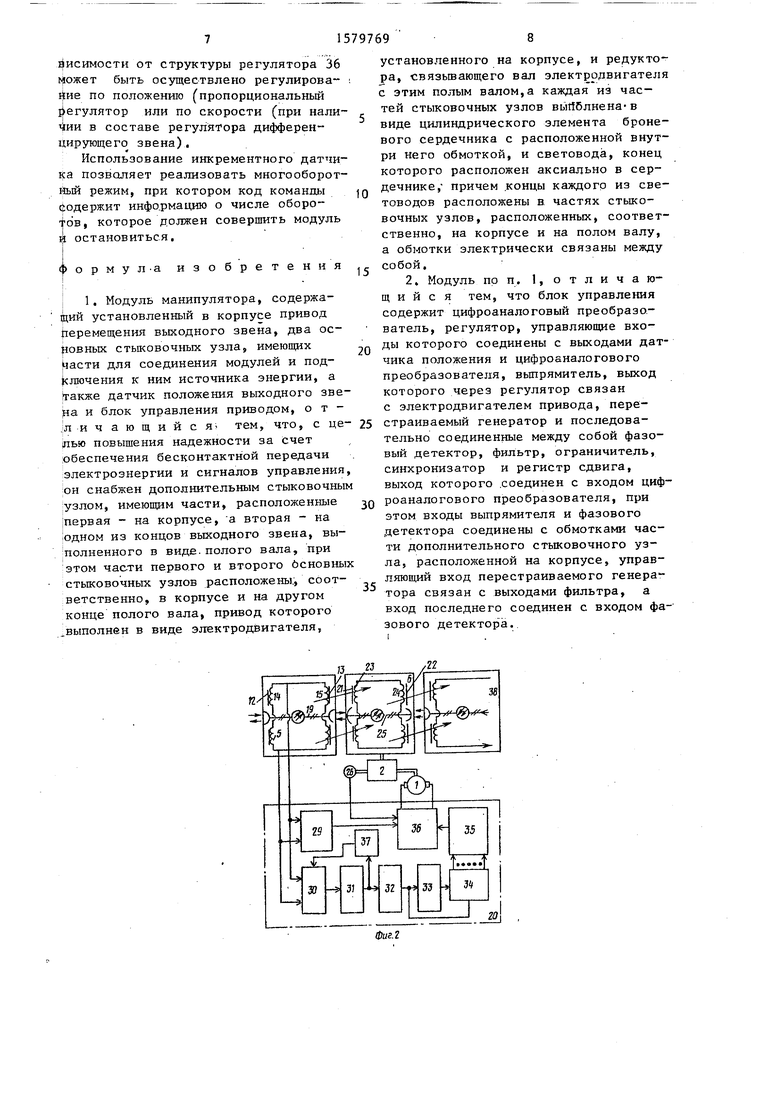
На фиг. 1 показан модуль манипулятора, общий вид; на фиг. 2 - функциональная схема модуля; на фиг. 3 - разрез А-А на фиг.1; на фиг. 4 и 5 - варианты установки модулей.
Модуль манипулятора содержит электродвигатель 1, редуктор 2 с червячной передачей 3, закрепленные на фланце 4 корпуса 5. Выходное звено 6 выполнено в виде полого вала 7 и втулки 8, опирающихся на подшипники 9 и 10, установленные во фланцах 4 и 11 корпуса.
На корпусе 5 установлены цилиндрические броневые сердечники 12 и 13, образующие части соответственно первого и дополнительного стыковочных узлов с обмотками 14 и 15, установленными в изолирующих втулках 16 и размещенными в обоймах 17 и 18, В центральных отверстиях сердечников 12 и 13 закреплены концы гибкого световода 19. Обмотки 14 и 15 соединены между собой параллельно и одновременна подключены . j к первому входу блока 20 управления. На выходном звене
5
0
5
0
5
0
5
установлены цилиндрические броневые сердечники 21 и 22 соответственно дополнительного и второго стыковочных узлов с обмотками 23 и 24, а в центральных отверстиях сердечников 21 и 22 закреплены концы гибкого световода 25, К второму входу блока 20 управления подключен датчик 26 положения, кинематически связанный зубчатыми колесами 27 и 28 с валом 7. Выход блока 20 подключен к электродвигателю 1.
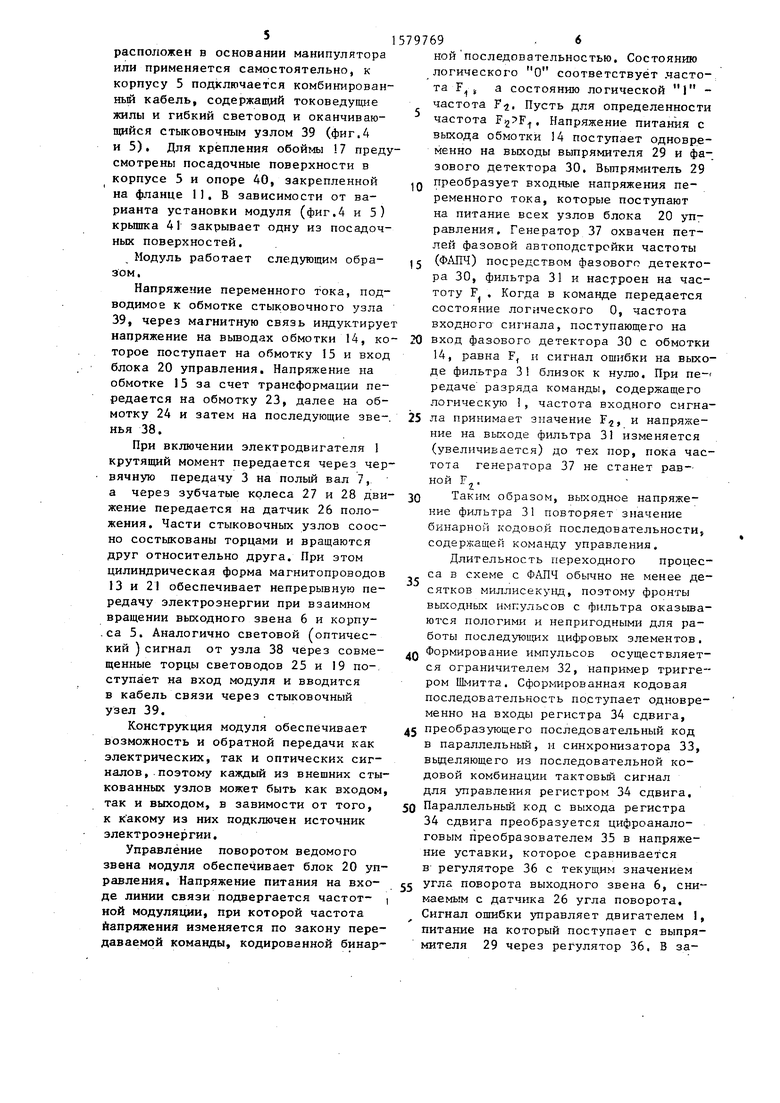
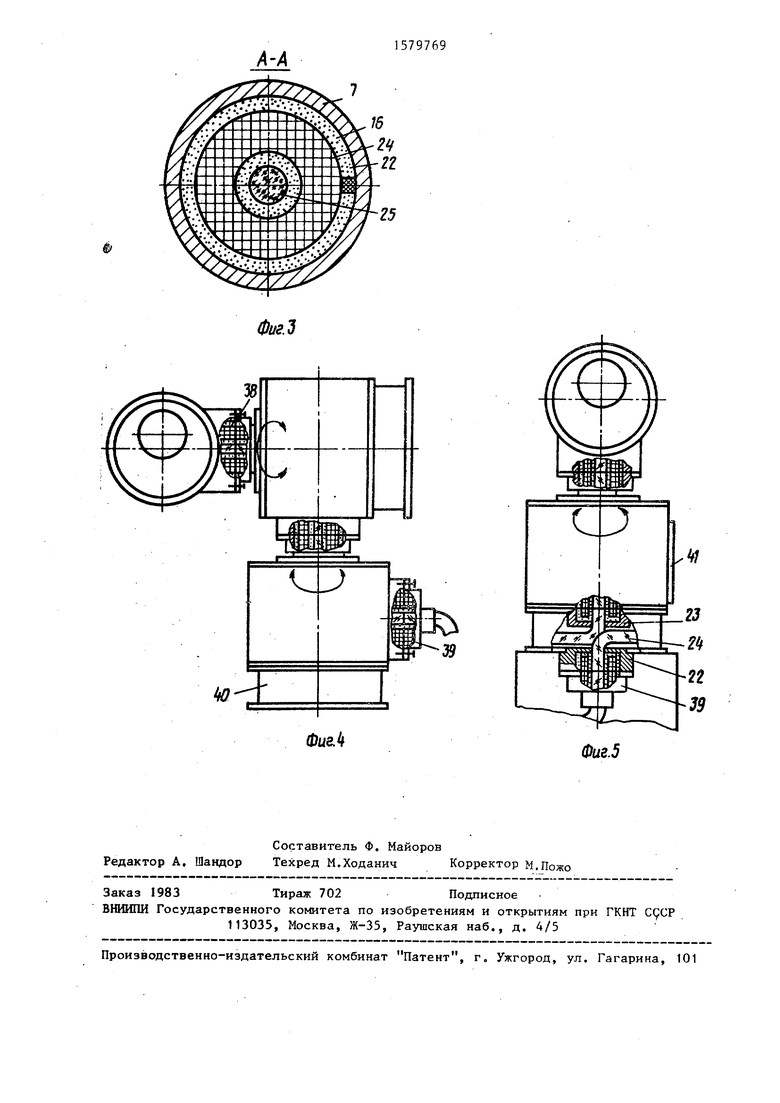
Блок 20 управления (фиг.2} содержит выпрямитель 29 для питания электродвигателя 1 и остальных узлов блока (линия питания на фиг,2 не показана), последовательно соединенные фазовый детектор 30, фильтр 31, ограничитель 32, синхронизатор 33, регистр 34 сдвига, цифроаналоговый преобразователь 35 и регулятор 36, Тактовый вход регистра 34 подключен к выходу ограничителя 32, а второй и третий входы регулятора 36 - к выходам датчика 26 положения и выпрямителя 29, Управляющий вход генератора 37 подключен к выходу фильтра 31, а его выход - к третьему входу фазового детектора 30, первый и второй входы которого соединены с соответствующими входами выпрямителя 29 и выходами обмоток 14 и 15. Выход ведомого звена (магнитопровод 22 и выходной конец световода 25) стыкуются с аналогичным узлом последующего эвена 38 (фиг. 4). Если модуль
ной последовательностью. Состоянию логического О соответствует .частота F
1
10
расположен в основании манипулятора или применяется самостоятельно, к корпусу 5 подключается комбинированный кабель, содержащий токоведущие жилы и гибкий световод и оканчивающийся стыковочным узлом 39 (фиг.4 и 5), Для крепления обоймы 17 предусмотрены посадочные поверхности в корпусе 5 и опоре 40, закрепленной на фланце 11. В зависимости от варианта установки модуля (фиг.4 и 5) крышка 41 закрывает одну из посадочных поверхностей.
Модуль работает следующим образом.
Напряжение переменного тока, подводимое к обмотке стыковочного узла 39, через магнитную связь индуктирует напряжение на выводах обмотки 14, ко- 20 вход фазового детектора 30 с обмотки
15
а состоянию логической 1 - частота F. Пусть для определенности частота . Напряжение питания с выхода обмотки 14 поступает одновременно на выходы выпрямителя 29 и фазового детектора 30. Выпрямитель 29 преобразует входные напряжения переменного тока, которые поступают на питание всех узлов блока 20 управления. Генератор 37 охвачен петлей фазовой автоподстройки частоты (ФАЛЧ) посредством фазового детектора 30, фильтра 31 и настроен на частоту F . Когда в команде передается состояние логического 0, частота входного сигнала, поступающего на
ной последовательностью. Состоянию логического О соответствует .частота F
1
0 вход фазового детектора 30 с обмотки
5
а состоянию логической 1 - частота F. Пусть для определенности частота . Напряжение питания с выхода обмотки 14 поступает одновременно на выходы выпрямителя 29 и фазового детектора 30. Выпрямитель 29 преобразует входные напряжения переменного тока, которые поступают на питание всех узлов блока 20 управления. Генератор 37 охвачен петлей фазовой автоподстройки частоты (ФАЛЧ) посредством фазового детектора 30, фильтра 31 и настроен на частоту F . Когда в команде передается состояние логического 0, частота входного сигнала, поступающего на
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления сейсмическим вибратором | 1982 |
|
SU1084762A1 |
| МУЛЬТИПЛЕКСОР ПЕРЕДАЧИ ДАННЫХ | 2005 |
|
RU2295148C1 |
| Способ управления электроприводом лифта с двухскоростным асинхронным электродвигателем и устройство для его осуществления | 1985 |
|
SU1307528A1 |
| Устройство фазовой автоподстройки частоты | 1981 |
|
SU1091354A1 |
| Электропривод переменного тока | 1988 |
|
SU1767689A1 |
| Стабилизированный преобразователь постоянного напряжения | 1979 |
|
SU788301A1 |
| УСТРОЙСТВО МОНИТОРИНГА ВЫСОКОВОЛЬТНЫХ ВВОДОВ И СИГНАЛИЗАЦИИ О СОСТОЯНИИ ИХ ИЗОЛЯЦИИ | 2006 |
|
RU2328009C1 |
| Электропривод | 1986 |
|
SU1372580A1 |
| УПРАВЛЯЮЩИЙ АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2001 |
|
RU2222028C2 |
| Устройство для автоматической настройки катушки индуктивности с подмагничиванием | 1978 |
|
SU771795A1 |
Изобретение относится к робототехнике и может быть использовано для построения манипуляторов модульной конструкции, несущих на конечном звене датчик визуальной информации системы технического зрения. Модуль снабжен дополнительным стыковочным узлом, имеющим части, расположенные первая - на корпусе, а вторая - на одном из концов выходного звена, выполненного в виде полого вала. Блок управления содержит цифроаналоговый преобразователь, регулятор, перестраиваемый генератор и последовательно соединенные между собой фазовый детектор, фильтр, ограничитель, синхронизатор и регистр сдвига. 1 з.п. ф-лы, 2 ил.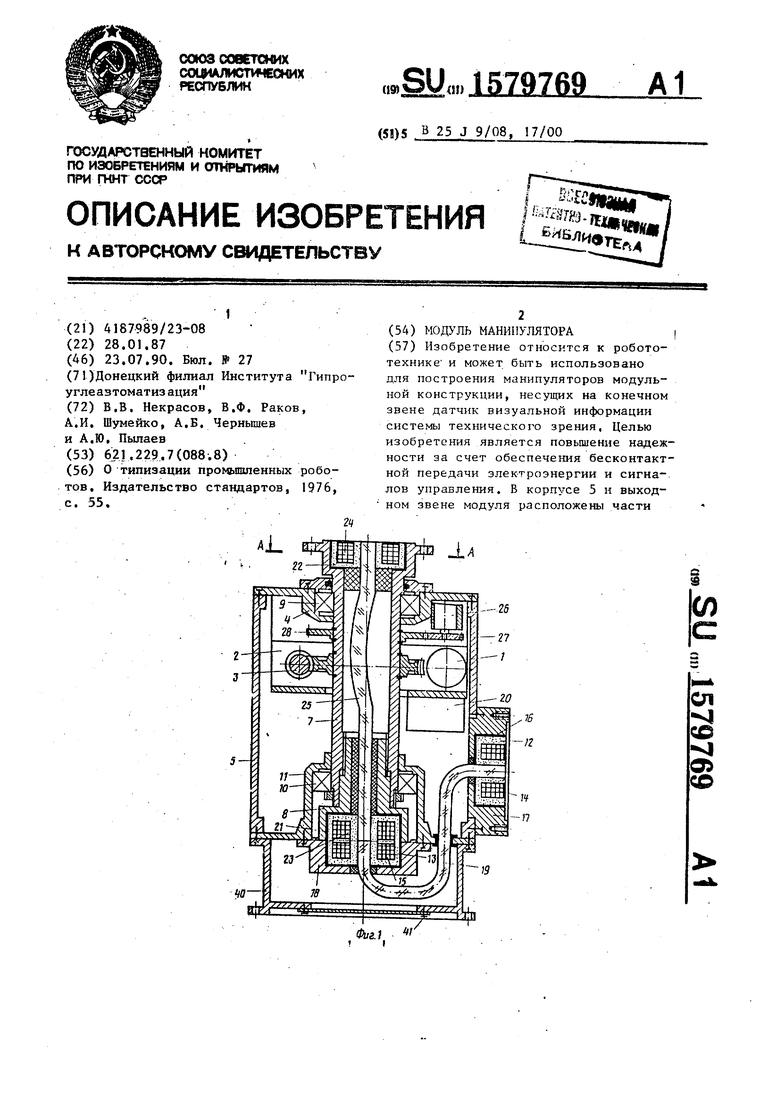
торое поступает на обмотку 15 и вход блока 20 управления. Напряжение на обмотке 15 за счет трансформации передается на обмотку 23, далее на обмотку 24 и затем на последующие зве-. нья 38.
При включении электродвигателя 1 крутящий момент передается через червячную передачу 3 на полый вал 7, а через зубчатые колеса 27 и 28 движение передается на датчик 26 положения. Части стыковочных узлов соос- но состыкованы торцами и вращаются друг относительно друга. При этом цилиндрическая форма магнитопроводов 13 и 21 обеспечивает непрерывную передачу электроэнергии при взаимном вращении выходного звена 6 и корпуса 5. Аналогично световой (оптический ) сигнал от узла 38 через совмещенные торцы световодов 25 и 19 поступает на вход модуля и вводится в кабель связи через стыковочный узел 39.
Конструкция модуля обеспечивает возможность и обратной передачи как электрических, так и оптических сигналов, поэтому каждый из внешних стыкованных узлов может быть как входом, так и выходом, в завимости от того, к какому из них подключен источник электроэнергии.
Управление поворотом ведомого звена модуля обеспечивает блок 20 управления. Напряжение питания на входе линии связи подвергается частот- | ной модуляции, при которой частота напряжения изменяется по закону передаваемой команды, кодированной бинар5
0
14, равна Ff и сигнал ошибки на выходе фильтра 31 близок к нулю. При пе- редаче разряда команды, содержащего логическую , частота входного сигнала принимает значение F, и напряжение на выходе фильтра 31 изменяется (увеличивается) до тех пор, пока частота генератора 37 не станет равной Г,.
Таким образом, выходное напряжение фильтра 31 повторяет значение бинарной кодовой последовательности, содержащей команду управления.
Длительность переходного процесса в схеме с ФАЛЧ обычно не менее десятков миллисекунд, поэтому фронты выходных импульсов с фильтра оказываются пологими и непригодными для работы последующих цифровых элементов. Формирование импульсов осуществляется ограничителем 32, например тригге ром Шмитта. Сформированная кодовая последовательность поступает одновременно на входы регистра 34 сдвига,
5 преобразующего последовательный код в параллельный, и синхронизатора 33, выделяющего из последовательной кодовой комбинации тактовый сигнал для управления регистром 34 сдвига.
0 Параллельный код с выхода регистра 34 сдвига преобразуется цифроанало- говым преобразователем 35 в напряжение уставки, которое сравнивается в регуляторе 36 с текущим значением
е угла поворота выходного звена 6, снимаемым с датчика 26 угла поворота. Сигнал ошибки управляет двигателем 1, питание на который поступает с выпрямителя 29 через регулятор 36. В за5
0
висимости от структуры регулятора 36 может быть осуществлено регулирова- ние по положению (пропорциональный регулятор или по скорости (при наличии в составе регулятора дифференцирующего звена).
Использование инкрементного датчи- ка позволяет реализовать многооборотный режим, при котором код команды содержит информацию о числе оборотов, которое должен совершить модуль и остановиться.
Формул-а изобретения
ветственно, в корпусе и на другом конце полого вала, привод которого выполнен в виде электродвигателя,
0
5
0
5
установленного на корпусе, и редуктора, связывающего вал электродвигателя с этим полым валом,а каждая из частей стыковочных узлов выполнена-в виде цилиндрического элемента броневого сердечника с расположенной внутри него обмоткой, и световода, конец которого расположен аксиально в сердечнике,- причем концы каждого из световодов расположены в частях стыковочных узлов, расположенных, соответственно, на корпусе и на полом валу, а обмотки электрически связаны между собой.
Фиг.З
L4i:BEUi::$ i
j.m
J
w
Фиг. k
У
te.5
| О типизации промышленных роботов | |||
| Издательство стандартов, 1976, с | |||
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
