Изобретение относится к электротехнике и может быть использовано при проектировании систем электропривода лифтов и других подъемно- транспортных механизмов, к качеству диаграммы движения которых и точности останова в заданном месте предъявляются повышенные требования, а характер нагрузки и цикличность работы эквивалентен лифтам.
Цель изобретения - повышение производительности лифта и повьш ение точности его останова.
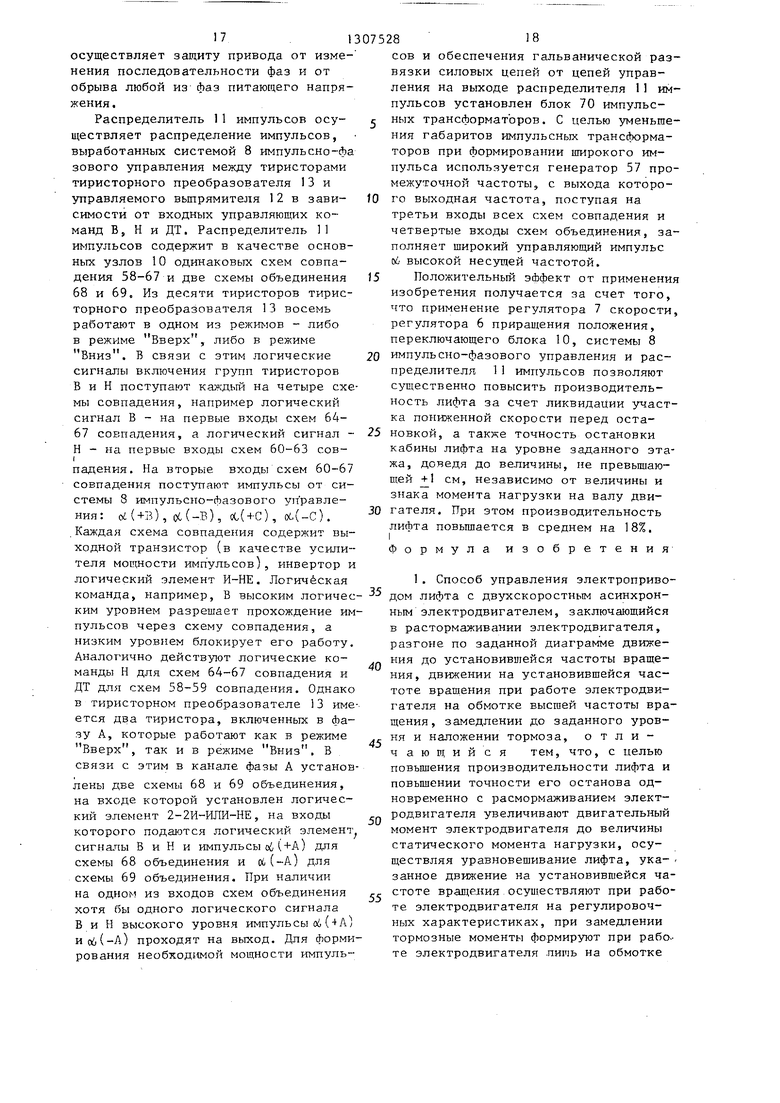
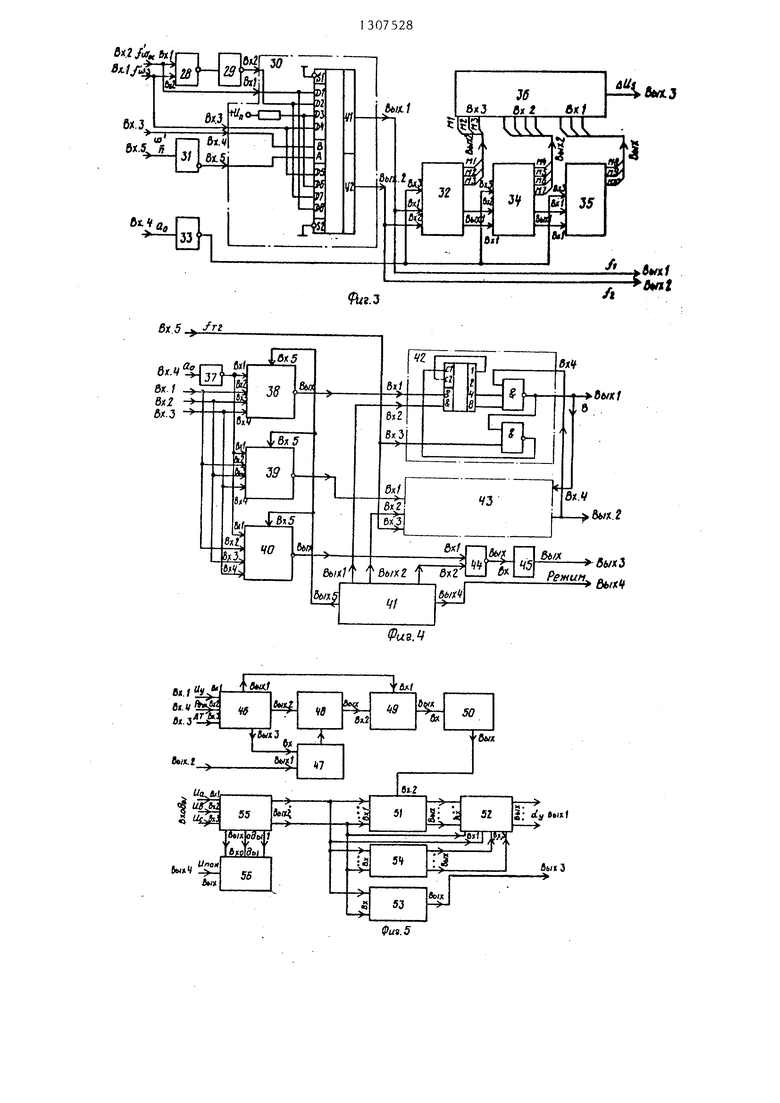
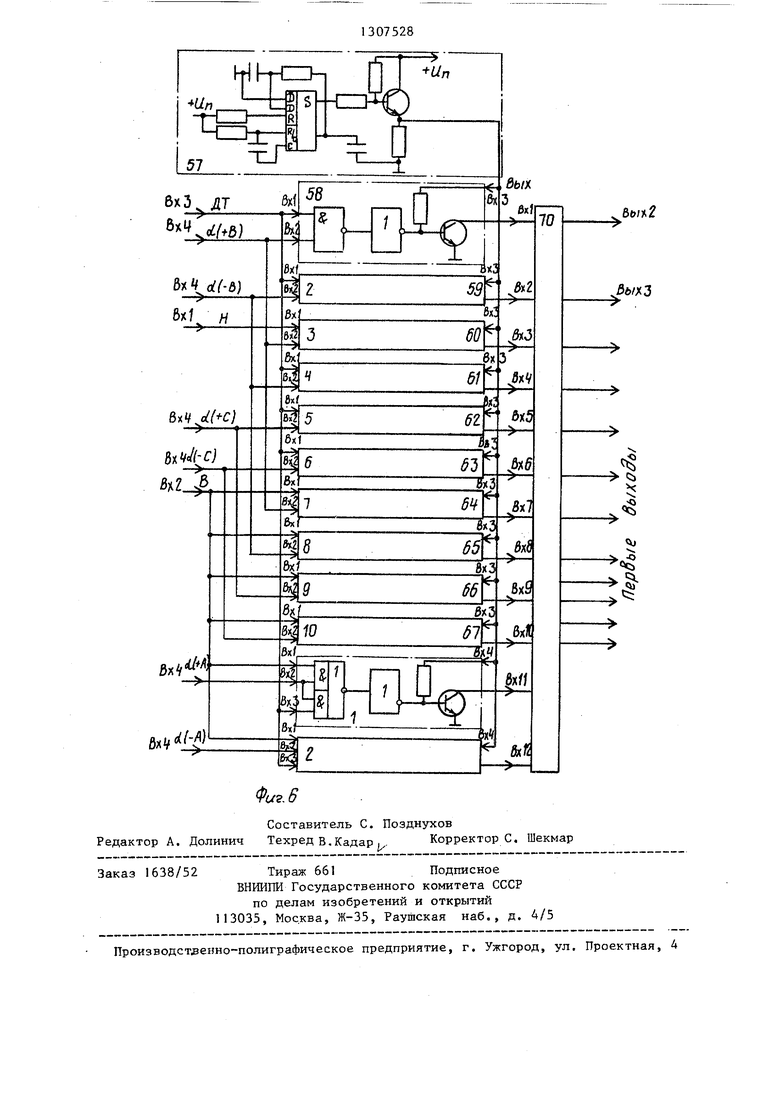
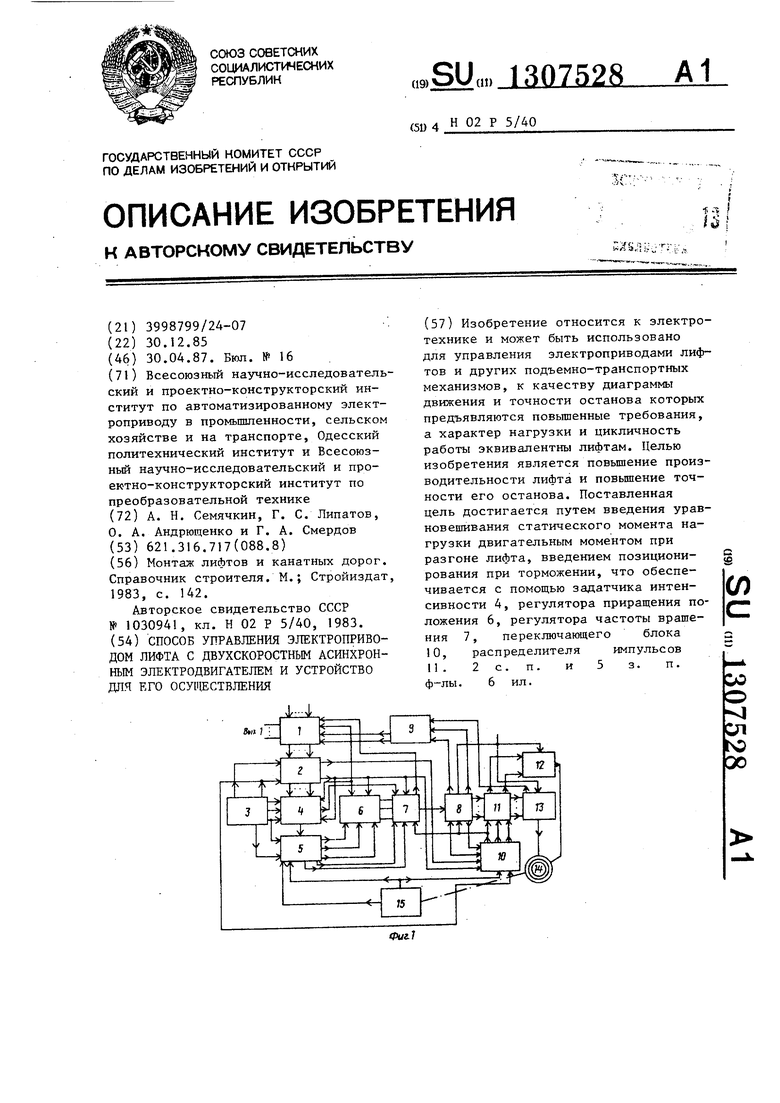
На фиг. 1 показана схема устройства управления электроприводом лифта с двухскоростным асинхронным электродвигателем; на фиг. 2 - схема регулятора частоты враш;ения; нафиг. 3- схема регулятора приращения положения; на фиг. 4 - схема переключающего блока; на фиг, 5 - схема системы импульсно-фазового управления; на фиг. 6 - схема распределителя импульсов.
Устройство для управления электроприводом лифта с двухскоростным асинхронным электродвигателем (фиг. 1) содержит блок 1 обработки входных команд, вторым выходом связанный с пер- вым входом управляющего блока 2, вторым и третьим входом соединенный соответственно с первым и вторым выходами генератора 3 тактовых импульсов, соединенного третьим, четвертым и пя- тым выходами с вторым, третьим и четвертым входами задатчика 4 интенсивности, первый выход которого соединен с первым входом блока 5 синхронизации, первым, вторым и третьим выходами связанного с первым, вторым и тре- .тьим входами регулятора 6 приращения положения, подключенного первым,вторым и третьим выходами к первому, второму и третьему входам регулятора 7 частоты вращения, первьм выход которого связан с вторым входом системы 8 импульсно-фазового управления, соединенной третьим и четвертым выходом соответственно с вторым и третьим входами блока 9 защиты, а третьим и четвертым входом и вторым выходом - с третьим и четвертым выходами и первым входом соответственно переключающего блока 10, связанного п &рвым, вторым и третьим выходами с первым, вторым и третьим входами распределителя 11 импульсовj вторым и третьим выходом соединенного с вторым и тре
5
0
5
0 5 0 5 0 5
тьим входами управляемого выпрямите-- ля 12, а первым десятиканальным выходом - с управляющим десятиканальным входом тиристорного преобразователя 13, силовой выход которого через двухскоростной асинхронный двигатель 14 связан с датчиком 15 частоты вращения, второй выход которого подключен к второму входу переключающего блока 10, соединенного пятым входом с третьим входом управляющего блока 2, третьим входом - с третьим выходом управляющего блока 2, а четвертым входом - с пятым входом регулятора 7 частоты вращения, четвертым входом регулятора 6 приращения положения, шестым входом задатчика 4 интенсивности и вторым выходом управляющего блока 2, первым выходом связанного с первым входом задатчика 4 интенсивности, пятьй вход которого подключен к третьему входу блока 1 обработки входных команд и пятому входу регулятора 6 приращения положения, авторой выход -к четвертому входу регулятора 7 частоты вращения, вторым выходом соединенного с четвертым входом блока 1 обработки входных команд, восьмым входом- с третьим входом систе1У1ы 8 импульсно-фазового управления, а шестыми седьмым входами - соответственно с чЬтвертьм и пятым выходам:и блока 5 синхронизации, второй и пятый входы Которого подключены соответственно к пятому и шестому выходам генератора 3 тактовых импульсов, а третий и четвертьй входы - к первому и второму выходам датчика 15 частоты вращения, первый шестика- нальный выход системы 8 импульсно-фазового управления соединен с четвертым шестиканальньм входом распределителя 11 импульсов 5 а первьй трех- фазньй вход - с силовым входом управляемого выпрямителя 12, связанного силовым выходом с обмоткой низшей частоты вращения асинхронного двигателя 14, силовой вход тиристорного преобразователя 13 соединен с силовым входом управляемого вьшрямителя 12, ,а дополнительньй выход - с первым входом блока 9 , первый и второй ВЫХОДЫ которого подключены соответственно к второму и третьему входам блока 1 обработки входных команд.
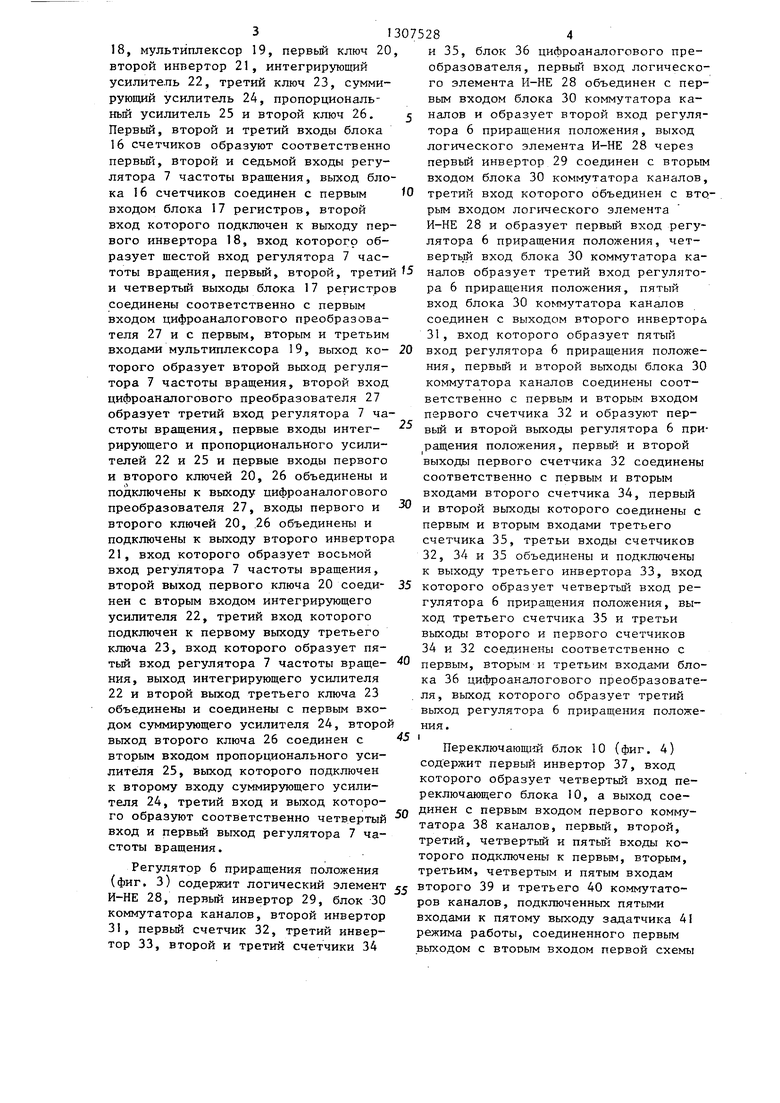
Регулятор 7 частоты вращения (фиг. 2) содержит блок 16 счетчиков, блок 17 регистров, первьй инвертор
18, мультиплексор 19, первьй ключ 20 второй инвертор 21, интегрирующий усилитель 22, третий ключ 23, суммирующий усилитель 24, пропорциональный усилитель 25 и второй ключ 26. Первый, второй и третий входы блока 16 счетчиков образуют соответственно первый, второй и седьмой входы регулятора 7 частоты вращения, выход блока 16 счетчиков соединен с первым входом блока 17 регистров, второй вход которого подключен к вьгкоду первого инвертора 18, вход которого образует щестой вход регулятора 7 частоты вращения, первый, второй, трети и четвертый выходы блока 17 регистро
соединены соответственно с первым входом цифроаналогового преобразователя 27 и с первым, вторым и третьим входами мультиплексора 19, выход ко- торого образует второй выход регулятора 7 частоты вращения, второй вход цифроаналогового преобразователя 27 образует третий вход регулятора 7 частоты вращения, первые входы интегрирующего и пропорционального усилителей 22 и 25 и первые входы первого и второго ключей 20, 26 обьединены и подключены к выходу цифроаналогового преобразователя 27, входы первого и второго ключей 20, .26 объединены и подключены к выходу второго инвертор 21, вход которого образует восьмой вход регулятора 7 частоты вращения, второй выход первого ключа 20 соединен с вторым входом интегрирующего усилителя 22, третий вход которого подключен к первому выходу третьего ключа 23, вход которого образует пятый вход регулятора 7 частоты вращения, выход интегрирующего усилителя 22 и второй выход третьего ключа 23 объединены и соединены с первым входом суммирующего усилителя 24, второ
выход второго ключа 26 соединен с вторым входом пропорционального усилителя 25, выход которого подключен к второму входу суммирующего усилителя 24, третий вход и выход которого образуют соответственно четвертый вход и первьй выход регулятора 7 частоты вращения.
Регулятор 6 приращения положения (фиг, 3) содержит логический элемент И-НЕ 28, первый инвертор 29, блок 30 коммутатора каналов, второй инвертор 31, первый счетчик 32, третий инвертор 33, второй и третий счетчики 34
и 35, блок 36 цифроаналогового преобразователя, nepBbrfi вход логического элемента PI-HE 28 объединен с первым входом блока 30 коммутатора каналов и образует второй вход регулятора 6 приращения положения, выход логического элемента И-НЕ 28 через первый инвертор 29 соединен с вторым входом блока 30 коммутатора каналов, третий вход которого объединен с вторым входом лог1-гческого элемента И-НЕ 28 и образует первый вход регулятора 6 приращения положения, чет- вертьи вход блока 30 коммутатора каналов образует третий вход регулятора 6 приращения положения, пятый вход блока 30 коммутатора каналов соединен с выходом второго инвертора 31, вход которого образует пятый вход регулятора 6 приращения положения, первый и второй выходы блока 30
коммутатора каналов соединены соответственно с первым и вторым входом первого счетчика 32 и образуют первый и второй выходы регулятора 6 приращения положения, первый и второй выходы первого счетчика 32 соединены соответственно с первым и вторым входами второго счетчика 34, первый и второй выходы которого соединены с первым и вторым входами третьего счетчика 35, третьи входы счетчиков 32, 34 и 35 объединены и подключены к выходу третьего инвертора 33, вход которого образует четвертый вход регулятора 6 приращения положения, выход третьего счетчика 35 и третьи выходы второго и первого счетчиков 34 и 32 соединены соответственно с первым, вторым и третьим входами блока 36 цифроаналогового преобразователя, выход которого образует третий выход регулятора 6 приращения положения.
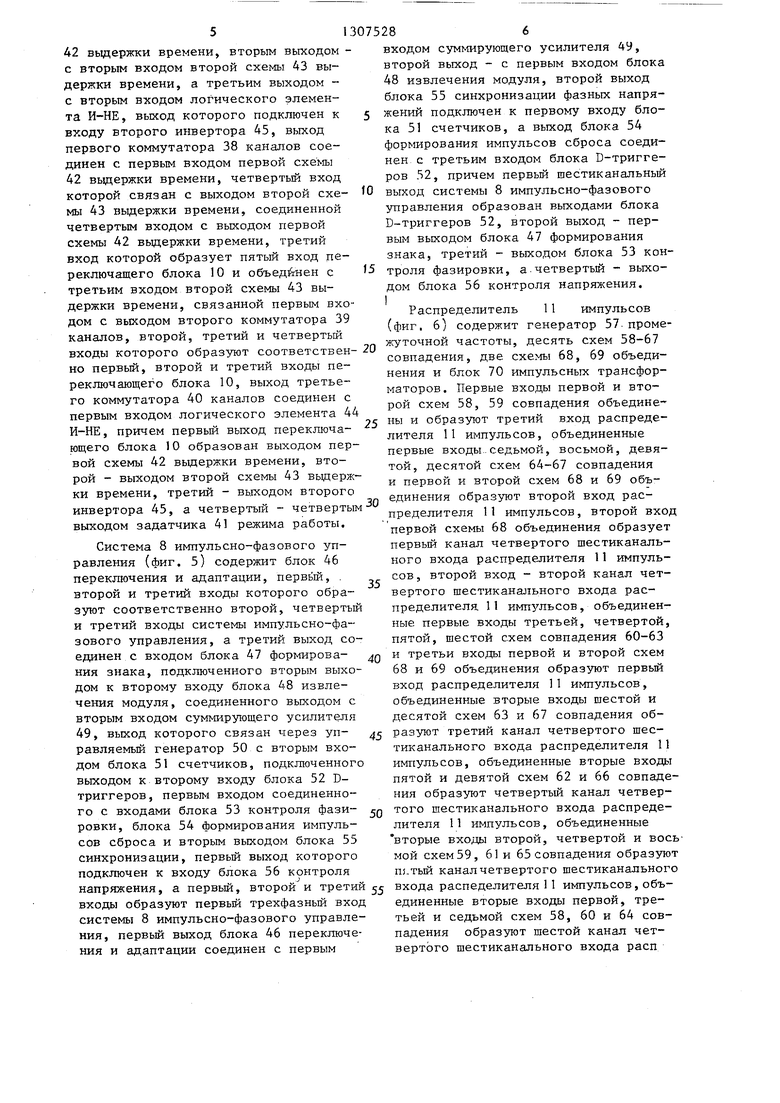
Переключающ1ш блок 10 (фиг. 4) содержит первый инвертор 37, вход которого образует четвертый вход переключающего блока 10, а выход соединен с первым входом первого коммутатора 38 каналов, первый, второй, третий, четвертый и ПЯТЬБ входы которого подключены к первым, вторым, третьим, четвертым и пятым входам второго 39 и третьего 40 коммутаторов каналов, подключенных пятыми входами к пятому выходу задатчика 41 режима работы, соединенного первым выходом с ВТОРЫМ входом первой схемы
42 выдержки времени, вторым выходом - с вторым входом второй схемы 43 выдержки времени, а третьим выходом - с вторым входом логического элемента И-НЕ, выход которого подключен к входу второго инвертора 45, выход первого коммутатора 38 каналов соединен с первым входом первой схемы 42 вьщержки времени, четвертый вход которой связан с выходом второй схемы 43 вьщержки времени, соединенной четвертым входом с выходом первой схемы 42 выдержки времени, третий вход которой образует пятый вход пе- реключащего блока 10 и объединен с третьим входом второй схемы 43 выдержки времени, связанной первым входом с выходом второго коммутатора 39 каналов, второй, третий и четвертый входы которого образуют соответствен- но первьш, второй и третий входы переключающего блока 10, выход третьего коммутатора 40 каналов соединен с первым входом логического элемента 44 И-НЕ, причем первый выход переключа- ющего блока 10 образован выходом первой схемы 42 вьщержки времени, второй - выходом второй схемы 43 вьщержки времени, третий - выходом второго инвертора 45, а четвертый - четверты выходом задатчика 41 режима работы.
Система 8 импульсно-фазового управления (фиг, 5) содержит блок 46 переключения и адаптации, первьш, . второй и третий входы которого обра зуют соответственно второй, четверты и третий входы системы импульсно-фазового управления, а третий выход соединен с входом блока 47 формирова- НИН знака, подключенного вторым выходом к второму входу блока 48 извлечения модуля, соединенного выходом с вторым входом суммирующего усилителя 49, выход которого связан через управляемый генератор 50 с вторым входом блока 51 счетчиков, подключенног выходом к второму входу блока 52 D- триггеров, первым входом соединенного с входами блока 53 контроля фази- ровки, блока 54 формирования импульсов сброса и вторым выходом блока 55 синхронизации, первьш выход которого подключен к входу блока 56 контроля
напряжения, а первый, второй и третий входа распеделителя 1 1 импульсов, объвходы образуют первый трехфазный входединенные вторые входы первой, тресистемы 8 импульсно-фазового управле-тьей и седьмой схем 58, 60 и 64 сов- ния, первьй выход блока 46 переключепадения образуют шестой канал четвертого шестиканального входа расп
ния и адаптации соединен с первым
входом суммирующего усилителя 4У, второй выход - с первым входом блока 48 извлечения модуля, второй выход блока 55 синхронизации фазных напряжений подключен к первому входу блока 51 счетчиков, а выход блока 54 формирования импульсов сброса соединен, с третьим входом блока D-тригге- ров 52, причем первый шестиканальньй выход системы 8 импульсно-фазового управления образован выходами блока D-триггеров 52, второй выход - первым выходом блока 47 формирования знака, третий - выходом блока 53 кон- троля фазировки, а.четвертый - выходом блока 56 контроля напряжения.
Q
5
5
0
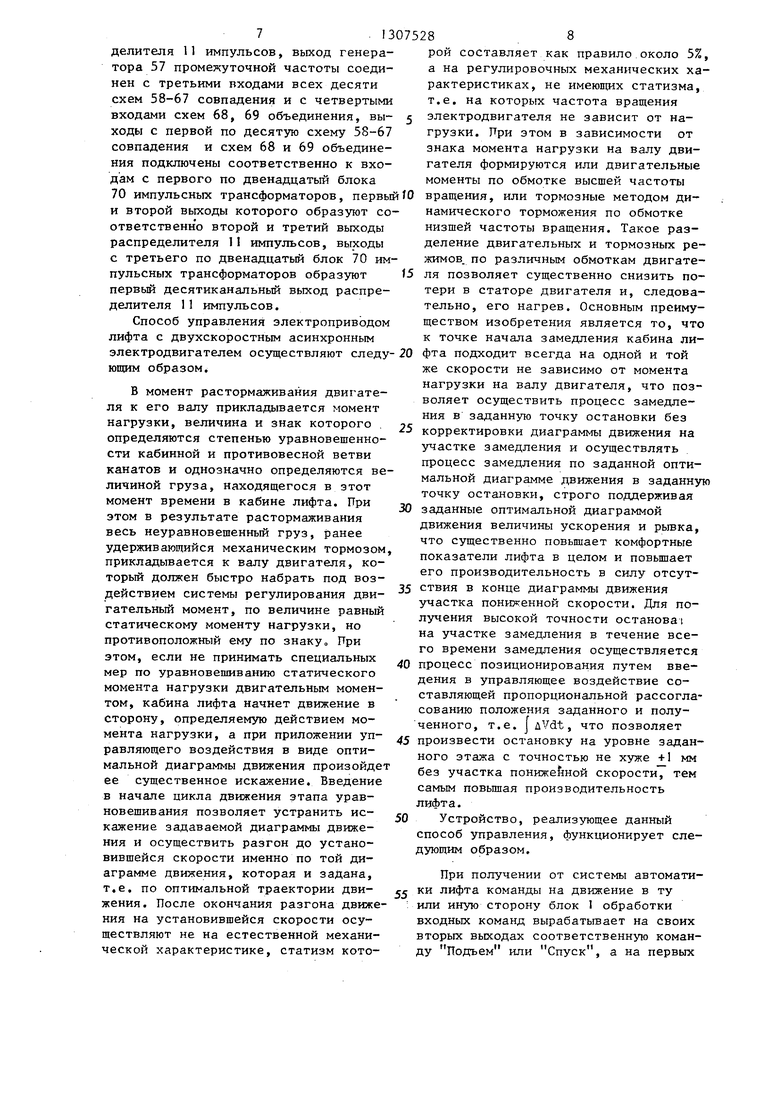
Распределитель 11 импульсов (фиг. 6) содержит генератор 57. промежуточной частоты, десять схем 58-67 совпадения, две схемы 68, 69 объединения и блок 70 импульсных трансформаторов. Первые входы первой и второй схем 58, 59 совпадения объедине- пы и образуют третий вход распределителя 11 импульсов, объединенные первые входы..седьмой, восьмой, девятой, десятой схем 64-67 совпадения и nepBofi и второй схем 68 и 69 объединения образуют второй вход распределителя 11 импульсов, второй вход первой схемы 68 объединения образует первый канал четвертого шестиканаль- ного входа распределителя 11 импульсов, второй вход - второй канал четвертого шестиканального входа распределителя 11 импз льсов, объединенные первые входы третьей, четвертой, пятой, шестой схем совпадения 60-63 и третьи входтз первой и второй схем 68 и 69 объединения образуют первьй вход распределителя 11 импульсов, объединенные вторые входы шестой и десятой схем 63 и 67 совпадения образуют третий канал четвертого шестиканального входа распределителя 11 импульсов, объединенные вторые входы пятой и девятой схем 62 и 66 совпадения образуют четвертый канал четвертого шестиканального входа распределителя П импульсов, объединенные вторые Bxojjfj второй, четвертой и восьмой схем 59, 61 и 65 Совпадения образуют пьтый канал четвертого шестиканального
тьей и седьмой схем 58, 60 и 64 сов-
падения образуют шестой канал четвертого шестиканального входа расп
делителя 11 импульсов, выход генератора 57 промежуточной частоты соединен с третьими входами всех десяти схем 58-67 совпадения и с четвертыми входами схем 68, 69 объединения, вы- ходы с первой по десятую схему 58-67 совпадения и схем 68 и 69 объединения подключены соответственно к входам с первого по двенадцатый блока 70 импульсных трансформаторов, первы и второй выходы которого образуют со ответственн о второй и третий выходы распределителя П импульсов, выходы с третьего по двенадцатью блок 70 импульсных трансформаторов образуют первьй десятиканальный выход распределителя 11 импульсов.
Способ управления электроприводом лифта с двухскоростным асинхронным электродвигателем осуществляют следу ющим образом.
В момент растормаживания двигателя к его валу прикладывается момент нагрузки, величина и знак которого . определяются степенью уравновешенности кабинной и противовесной ветви канатов и однозначно определяются величиной груза, находящегося в этот момент времени в кабине лифта. При этом в результате растормаживания весь неуравновешенный груз, ранее удерживающийся механическим тормозом прикладывается к валу двигателя, который должен быстро набрать под воздействием системы регулирования дви- гательньга момент, по величине равный статическому моменту нагрузки, но противоположный ему по знаку При этом, если не принимать специальных мер по уравновешиванию статического момента нагрузки двигательным моментом, кабина лифта начнет движение в сторону, определяемую действием момента нагрузки, а при приложении уп- равляющего воздействия в виде оптимальной диаграммы движения произойдет ее существенное искажение. Введение в начале цикла движения этапа уравновешивания позволяет устранить ис- кажение задаваемой диаграммы движения и осуществить разгон до установившейся скорости именно по той диаграмме движения, которая и задана, т.е. по оптимальной траектории дви- жения. После окончания разгона движения на установившейся скорости осуществляют не на естественной механической характеристике, статизм которой составляет как правило около 5% а на регулировочных механических характеристиках, не имеющих статизма, т.е. на которых частота вращения электродвигателя не зависит от нагрузки. При этом в зависимости от знака момента нагрузки на валу двигателя формируются или двигательные моменты по обмотке высшей частоты вращения, или тормозные методом динамического торможения по обмотке низшей частоты вращения. Такое разделение двигательных и тормозных режимов, по различньм обмоткам двигателя позволяет существенно снизить потери в статоре двигателя и, следовательно, его нагрев. Основным преимуществом изобретения является то, что к точке начала замедления кабина лифта подходит всегда на одной и той же скорости не зависимо от момента нагрузки на валу двигателя, что позволяет осуществить процесс замедления в заданную точку остановки без корректировки диаграммы движения на участке замедления и осуществлять процесс замедления по заданной оптимальной диаграмме движения в заданну точку остановки, строго поддерживая заданные оптимальной диаграммой движения величины ускорения и рывка, что существенно повьппает комфортные показатели лифта в целом и повьш1ает его производительность в силу отсутствия в конце диаграммы движения участка пониженной скорости. Для получения высокой точности останова на участке замедления в течение всего времени замедления осуществляется процесс позиционирования путем введения в управляющее воздействие составляющей пропорциональной рассогласованию положения заданного и полу- ченного, т.е. J AVdt, что позволяет произвести остановку на уровне заданного этажа с точностью не хуже +1 мм без участка пониженной скорости, тем самым повьшгая производительность лифта.
Устройство, реализующее данный способ управления, функционирует следующим образом.
При получении от системы автоматики лифта команды на движение в ту или иную сторону блок I обработки входных команд вырабатывает на своих вторых выходах соответственную команду Подьем или Спуск, а на первых
130752810
от его величины и знака. По окончании времени уравновешивания управляющий
блок
,11
выходах - команду растормаживания электромеханического тормоза, в результате чего происходит растормажи- вание механической тормозной системы и к валу двигателя 14 прикладывается момент нагрузки. В результате управляющий блок 2 выходит из исходного состояния и по своему второму выходу переводит регулятор 6 приращения положения, регулятор 7 частоты вращенияfО ходе сигнала задания частоты вращения
2 переходит в состояние диаграмма и, вырабатывая на своих первых выходах последовательность логических сигналов, управляет работой задатчика 4 интенсивности, инициируя появление на его первом выходе сигнала задания частоты вращения fcoi втором выи переключающий блок 10 в рабочее состояние, однако задатчик 4 интенсивности в это время переводится в состояние ожидания следующей команды от управляющего блока 2, При этом система регулирования находится в состоянии уравновешивания, и задание частоты вращения от задатчика 4 интенсивности на вход регулятора 7 частоты вращения не поступает. С началом вращения двигателя при его рас- ., тормаживани и с выхода датчика 15 частоты вращения сигнал обратной связи по частоте вращения f , представляющий собой частотно-импульсный сигнал, через блок 5 синхронизации поступает на второй вход регулятора 6 приращения положения и с его третьего выхода в виде аналогового сигнала и.. поступает на третий вход регулйQb-
тора 7 частоты вращения, похшостью определяя поведение системы регулирования наэтапе уравновешивания. При
и на втором выходе сигнала зада15
НИН ускорения и. В блоке 5 синхронизации частот происходит разделение во времени частот задания частоты вращения f,, и обратной связи f , а также синхронизация с опорной частотой fj, знака направления вращения
«00
sign со . Выходные сигналы f (у f и поступают на регулятор 6 прираще20
25
О
кия, где, с одной стороны осуществляется определение рассогласования по положению , а с другой - распределение частот задания и обратной связи по различным выходам в соответствии с уровнями логических сигналов П и to . С первого и второго выхода частоты f,
и Г„
и
30
L поступают на первый второй вход регулятора 7 частоты вращения. При этом по каналу fi может
этом по каналу fi .1 -,
поступать как f , так и f в зависимости от уровней сигналов П и со
.аналогично и по каналу f
В регуэтом знак сигнала управле ния опляторе скорости осуществляется определение разности частот задания и ределяется логическим сигналом signu 35 обратной связи по частоте вращения, представляющим собой знак направления вращения двигателя 14, и воздействует н-а систему регулирования таким образом, чтобы удержать на месте ка40
суммирование с ней сигналов U и U а также преобразование полученной суммы в соответствии с его передаточ ной функцией ПИ-регулятора
бину лифта на этапе уравновешивания при резком приложении к валу двигателя момента нагрузки. Учитывая, что сигнал Ujjg представляет собой рассогласование по положению заданного к полученному, т.е..
Wp,,(P) Кр,
+
1
ф . Р - рс 45
Работой цифроаналогового регулятора 7 частоты вращения управляет блок 5 синхронизации сигналами с четвертого и пятого выхода Fg и F соответственно. Выходной сигнал регу лятора 7 частоты вращения U|j имеет вид
Kg sign со
соэ
- f,
со ос
/dt,
а также то, что на этапе уравновеши-, вания сигнал задания частоты вращения равен нулю, т.е. fy, О поведение системы регулирования в период уравновешивания определяется сигналом
:Ар
Kg. sign со
-Q
ОС
. dt
;
что приводит к удержанию кабины лифта на этаже при приложении момента нагрузки к валу двигателя независимо
блок
,11
ходе сигнала задания частоты вращения
2 переходит в состояние диаграмма и, вырабатывая на своих первых выходах последовательность логических сигналов, управляет работой задатчика 4 интенсивности, инициируя появление на его первом выходе сигнала задания частоты вращения fcoi втором и на втором выходе сигнала зада5
НИН ускорения и. В блоке 5 синхронизации частот происходит разделение во времени частот задания частоты вращения f,, и обратной связи f , а также синхронизация с опорной частотой fj, знака направления вращения
«00
sign со . Выходные сигналы f (у f и поступают на регулятор 6 прираще0
5
О
кия, где, с одной стороны осуществляется определение рассогласования по положению , а с другой - распределение частот задания и обратной связи по различным выходам в соответствии с уровнями логических сигналов П и to . С первого и второго выхода частоты f,
и Г„
и
0
L поступают на первый второй вход регулятора 7 частоты вращения. При этом по каналу fi может
этом по каналу fi .1 -,
поступать как f , так и f в зависимости от уровней сигналов П и со
.аналогично и по каналу f
В регуляторе скорости осуществляется определение разности частот задания и обратной связи по частоте вращения,
суммирование с ней сигналов U и U а также преобразование полученной суммы в соответствии с его передаточной функцией ПИ-регулятора
Кр,
+
1
ф . Р - рс
Работой цифроаналогового регулятора 7 частоты вращения управляет блок 5 синхронизации сигналами с четвертого и пятого выхода Fg и F соответственно. Выходной сигнал регулятора 7 частоты вращения U|j имеет вид
J
U.(t) Upc(t) о
Ua(t)
55
Таким образом, введение на вход регулятора 7 частоты вращения сигнала и(t), пропорционального заданному ускорению, придает системе регулирования инвариантность по управляющему воздействию. Воздействуя на вход системы 8 импульсно-фазового управления, выходной сигнал Uh регулятора 7 частоты враш.ения изменяет угол регулирования (и тиристорами тиристорного преобразователя 13 или управляемого выпрямителя 12. Распределитель 11 им пульсов осуществляет распредел ение импульсов регулирования в зависимост от состояния логических сигналов В,Н и ДТ на своих первом, втором и третьем входах. Работой распределителя 11 импульсов управляет переключающий блок 10, который в сЬункции входных команд sign Uy sign СО и ( создает определенную комбинацию команд В, Н . и ДТ на выходах, при этом на устано- вившейся скорости и при работе привода с моментом нагрузки, близким к нулю, в зависимости от знака сигнала управления sign Uy двигатель 14 переводится либо в двигательный режим работы по обмотке высшей частоты врашения командой В или Н, в зависимости от направления движения, либо - в тормозной по обмотке низшей частоты врашения командой ДТ, обеспечивая при этом равенство скорости заданной и полученной. Управление двигателем 14 в двигательных режимах обеспечивается тиристорным преобразователем 13, выполненным по реверсивной схеме и содержащем 10 тиристорных ключей, а в тормозном - с помошью управляемого вьтрямителя 12. В зависимости от режима работы ручной или автоматический переключающий блок 10 формирует на своем четвертом выходе высокий или низкий уровни и тем самым переключает вход системы 8 импульсно-фа- зового управления либо к выходу регулятора 7 частоты вращения в автомати- ческом режиме работы, либо к внутреннему источнику опорного напряжения в ручном режиме работы. В исходном состоянии логический сигнал а, блоки
рует работу переключающего блока 10. В режиме динамического торможения переключающий блок 10, воздействуя на восьмой вход регулятора 7 частоты вращения, осуществляет изменение его параметров, коэффициента передачи и постоянной времени. Блок 9 защиты осуществляет защиту двигателя и силовых тиристоров от токов короткого замыкания и перегрузки, воздействуя своим первым выходом на второй вход блока 1 обработки входных команд. При срабатывании защиты система регулирования автоматически переводится в
О 5 0 5 0
5
0
,
исходное состояние a. При подаче команды на замедление регулятор 6 при- раигения положения воздействует на систему регулирования таким образом, чтобы свести к нулю рассогласование по положению U и тем с.амым в заданную точку без участка пониженной скорости и с высокой точностью.
Регулятор 7 частоты врапения выполнен в виде циАроаналогового адаптивного ПИ-регулятора. Цифровая часть регулятора 7 частоты вращения осуществляет определение разности частот задания скорости и обратной связи по скорости, которые поступают на первый и второй входы регулятора 7 по каналам f( и f на первый и второй вход блока счетчиков 16. На третий вход блока счетчиков 16 поступает тактовая частота Fg , определяюЕ1ая периоды счета импульсов частот f, и f и период обнуления блока 16. Канал частоты f( поступает на вычитающий вход блока 16 счетчиков, а канал частоты f - на суммирующий вход. В результате этого на вьгходах блока 16 счетчиков за период счета импульсов, определяемый тактовой частотой Fg, накапливается код разности частот задания и обратной связи по скорости в двоичном коде. По импульсам второй тактовой частоты F,. этот код перепио
сывается в блок 17 регистров. Частоты Fft и Fg сдвинуты по времени друг относительно друга на 180 эл.град., результате чего сначала по частоте Fg происходит запись полученного кода разности частот в блок 17 регистров, а затем по частоте происходит запись полученного кода разности частот в блок 17 регистров, а затем по частоте Fg происходит обнуление блока 16 счетчиков. Затем этот процесс повторяется. Код разности частот задания и обратной связи с первого выхода блока 17 регистров поступает на первьш вход цифроаналого- вого преобразователя 27, на выходе которого образуется аналоговый сигнал, пропорциональный разности заданной и полученной частот вращения,
суммированный с сигналов U, поступающим на второй вход цифроаналого- вого преобразователя 27. Аналоговая часть регулятора 7 частоты вращения
представляет собой адаптивный пропорционально-интегральный регулятор, содержащий отдельно интегральную составляющую, выполненную на интегрирующем усилителе 2, отдельно пропорциональную составляющую, выполненную на пропорциональном усилителе 25, и суммирующий усилитель 24, на третий вход которого поступает сигнал U, пропорциональный заданному ускорению Изменение в режиме динамического торможения постоянной времени регулятора 7 частоты вращения осуществляется с помощью ключа 20, а коэффициента передачи - с помощью ключа 26, причем в режиме динамического торможения происходит замыкание ключей 20 и 26, в результате чего происходит уменьшение постоянной времени и увеличение коэффициента передачи. Ключ 23 осуществляет щунтирование емкости в обратной- связи интегрирующего усилителя 22 на стоянке лифта с наложенным тормозом, так как при этом происходит размыкание обратной связи по частоте вращения. При разряде коды с второго, третьего и четвертого выходов блока 17 регистров, поступающие на входы мультиплексора 19, позволяют контролировать максимальное рассогласование S заданной и полученной скоростей и производить аварийное отключение привода, переводя систему регулирования в исходное состояние.
Регулятор 6 приращения положения вьшолнен в виде цифрового инте гриру- ющего регулятора и формирует на выходе сигнал
-+ (f
cOi
-
полярность которого определяется как знаком разницы частот f и f , так и уровнями логических сигналов И и со . Основной алгоритм работы регулятора 6 приращения положения реализован на мультиплексоре, составляющим блок 30 коммутатора каналов. На его входы поступаю частоты задания, частоты вращения , обратной связи по частоте вращения t.. , сумма частот fl., + f
ц. + f(j , формирующаяся элементами 28 и 29, а также управляющие сигналы Q и г . Б зависимости от уровней управляющих сигналов четвертого и пятого входов блока 0 коммутатора каналов на его первый и второй выходы поступает та или иная частота. Частоты с выхода блока 30 коммутатора каналов поступают на входы
первого счетчика 32, на первые вько- ды которого последовательно включены счетчики 34 и 35, причем первые входы счетчиков представляют собой входы
вычитания, а вторые - суммирования. Таким образом, благодаря тому, что одна из частот поступает на вычитающий вход, а другая - на суммирующий на выходах счетчиков осуществляется
накопление кода разности частот, что по своему принципу соответствует интегрированию разности частот. Обнуление счетчиков производится при переходе системы регулирования в исходное состояние сигналом а с выхода инвертора 33. Двоичный код с выхода счетчиков поступает на входы блока 36 цифроаналогового преобразователя, на выходе которого образуется аналоговый сигнал рассогласования положений
Uu5.
Переключаю11щй блок 10 представляет собой комбинационное логическое устройство, которое в соответствии с заложенными в него алгоритмом по состоянию входных управляющих сигналов sign Uu sign со и Q „ц формирует выходные координаты В, Н и ДТ. Входной сигнал а, поступающий на первые
входы коммутаторов каналов 38, 39 и I
40, через инвертор 37 блокирует работу коммутаторов в исходном состоянии. В автоматическом режиме работы, определяемом задатчиком 14 режима работы, с его пятого выхода логический сигнал поступает на пятые входы коммутаторов каналов 38, 39 и 40 и организует формирование сигналов НА, НА, ДТА в автоматическом режиме в зависимости от состояния логических сигналов sign Им, sign оэ и to„в При этом
- u 8П и sign со„ц sign U|j + sign Uy .signO} j
sign lltj- sing co-t-coTie + sign Uj, X sign w Wne .
B ручном режиме работы управление осуществляется с помощью кнопок за- датчика 41 режима работы, на выходах ее которого формируются команды ручного режим работы ВР, ИР и ДТР. Команды М и В поступают на первый и второй входы схемы 42 выдержки времени, а команды НА и ИР - на аналогичные входы схемы 43 вьщержки времени. На третьи входы схем 42 и 43 вьщержки времени поступает тактовая частота f. 1000 Гц. Назначение схем 42 и 43, выдержки времени - создать задержку на подачу команд В и Н на распределитель 11 импульсов при переключении групп тиристоров для исключения возможности коротких замыканий. Вьщерж- ка времени, формируемая схемами 42 и 43 вьщержки времени составляет Пмс, что вполне достаточно для запирания тиристоров, выходящих из работы, и не является большим с точки зрения влияния на регулировочные характери- стики системы регулирования. Для повышения надежности работы схемы 42 и 43 вьщержки времени сблокированы перекрестными связями по своим выходам, т.е„ выходной сигнал Н схемы 43 вьщержки времени подан на четвертый вход схемы 42 вьщержки времени, а его выходной сигнал В подан на чет- вертый вход схемы 43 вьщержки времени. Логические команды ДТА с выхода коммутатора каналов 40 и ДТР с третьего выхода задатчика режима работы 41 поступают на входы логического элемента 44-Ii-HE и через инвертор 45 сформированная команда ДТ поступает на выход переключающего блока 10.
ДТ ДТА ДТР ДТА + ДТР.
Логическая команда ДТ не имеет в сво ем канале элементов выдержки времени в силу того, что управление режимом динамического торможения осуществляется от отдельного управляемого выпрямителя 12 и отдельной обмоткой двигателя 14.
Система 8 импульсно-фазового управления выполнена в виде аналого- цифровой системы управления. На входе системы 8 импульсно-фазового уп- равления установлен блок 46 переключения и адаптации, на входы которого .поступают аналоговый сигнал управления Un с выхода регулятора 7 частоты врашения и логические управляющие сигналы Режим ИДТ из переключающег блока 10. В соответствии с уровнем логического сигнала Режим блок 4 переключения и адаптации пропускает на второй выход сигнал управления в ручном режиме. С третьего выхода блока 46 переключения и адаптации сигнал управления поступает на блок 47 формирования знака, на втором выходе
которого формируется сигнал sign IL , необходимый для работы переключающего блока 10, ас первого выхода анало- . гичный сигнал поступает на первый вход блока 48 извлечения модуля, управляя работой последнего таким образом, что на его выходе всегда формируется сигнал, пропорциональный модулю сигнала управления, т.е. /Им/ поступающий на первьш вход суммирующего усилителя 49. С ммируюпщй усилитель 49 осуществляет ограничение по максимуму и по минимуму сигнала |U(,|.,a также производит изменение величины ограничения по максимуму в режиме динамического торможения путе.м воздействия на второй вход суммирующего усилителя 49 сигналом с первого выхода блока 46 переключения и адаптации, что необходимо при переходе привода от двигательного к тормозному режиму работы. С выхода суммирующего усилителя 49 сигнал управления поступает на вход управляемого генератора 30, на выходе которого образуется частота f (, , обратно пропорпио- нальная сигналу управления на входе, которая поступает на первый вход блока 51 счетчиков. Блок 51 счетчиков осуп ествляет подсчет числа импульсов за период синхронизирующего напряжения каждой из фаз и при появлении логической ед1шицы в старшем разряде по своему первому входу записьгоает эту единицу в блок D-триггеров 52, на выходе которого при этом формируется ш- пульс управления тиристором с- углом регулирования, определяемого по выражению
N
f. 360
-f
Ч
Синхронизирующие напряжения, поступающие на вторые входы блока 51 счетчиков, на входы блока 54 формирования импульсов сброса, блока 53 контроля фазировки и вторые входы блока D-триггеров 52 с второго выхода блока 55 синхронизации фазных напряжений , организуют появление импульсов на выходах блока D-триггеров 52 под положительной и отрицательной полуволной фазных напряжений фаз А, В и С. Блок 56 контроля напр тжения осуществляет контроль напряжения сети, и при его снижении более чем на 15% подает в блок 9 защиты команду на отключение. Блок 53 контроля фазировки
осуществляет защиту привода от изменения последовательности фаз и от обрыва любой из фаз питающего напряжения .
Распределитель 11 импульсов осу- ществляет распределение импульсов, выработанных системой 8 импульсно-фа зового управления между тиристорами тиристорного преобразователя 13 и управляемого выпрямителя 12 в зави- симости от входных управляющих команд В, Н и ДТ. Распределитель 11 импульсов содержит в качестве основных узлов 10 одинаковых схем совпадения 58-67 и две схемы объединения 68 и 69. Из десяти тиристоров тиристорного преобразователя 13 восемь работают в одном из режимов - либо в режиме Вверх, либо в режиме Вниз. В связи с этим логические сигналы включения групп тиристоров В и Н поступают каясдьт на четыре схемы совпадения, например логический сигнал В - на первые входы схем 64- 67 совпадения, а логический сигнал -
Н - на первые входы схем 60-63 совI
падения. На вторые входы схем 60-67
совпадения поступают импульсы от системы 8 импульсно-фазового управления: ы(+В), (Х,(-В), сС(+С), л(-С). .Каждая схема совпадения содержит выходной транзистор (в качестве усилителя мощности импульсов), инвертор и логический элемент И-НЕ. Логическая команда, например, В высоким логичес КИМ уровнем разрешает прохождение импульсов через схему совпадения, а низким уровнем блокирует его работу. Аналогично действуют логические команды Н для схем 64-67 совпадения и ДТ для схем 58-59 совпадения. Однако в тиристорном преобразователе 13 имеется два тиристора, включенных в фазу А, которые работают как в режиме Вверх, так и в режиме Вниз. В связи с этим в канале фазы А установлены две схемы 68 и 69 объединения, на входе которой установлен логический элемент 2-2И-ИЛИ-НЕ, на входы которого подаются логический элемент сигналы В и Н и импульсы oi () для схемы 68 объединения и oi(-A) для схемы 69 объединения. При наличии на одном из входов схем объединения хотя бы одного логического сигнала В и Н высокого уровня импульсы oi (- А) И((-А) проходят на выход. Для формирования необходимой мощности импуль
5 0 5
0
0
5
0
5
сов и обеспечения гальванической развязки силовых цепей от цепей управления на выходе распределителя 11 импульсов установлен блок 70 импульсных трансформаторов. С целью уменьшения габаритов импульсных трансформаторов при формировании широкого импульса используется генератор 57 промежуточной частоты, с выхода которого выходная частота, поступая на третьи входы всех схем совпадения и четвертые входы схем объединения, заполняет широкий управляющий импульс и высокой несущей частотой.
Положительный эффект от применения изобретения получается за счет того, что применение регулятора 7 скорости, регулятора 6 приращения положения, переключающего блока 10, системы 8 импульсно-фазового управления и распределителя 11 импульсов позволяют существенно повысить производительность лифта за счет ликвидации участка пониженной скорости перед остановкой, а также точность остановки кабины лифта на уровне заданного этажа, доведя до величины, не превьшаю- щей + см, независимо от величины и знака момента нагрузки на валу двигателя. При этом производительность лифта повышается в среднем на 18%.
Формула изобретения
1. Способ управления электроприводом лифта с двухскоростным асинхронным электродвигателем, заключающийся в растормаживании электродвигателя, разгоне по заданной диаграмме движения до установившейся частоты вращения, движении на установившейся частоте вращения при работе электродвигателя на обмотке высшей частоты вращения, замедлении до заданного уровня и наложении тормоза, о т л и - ч а ю Dt и и с я тем, что, с целью повьпления производительности лифта и повьш1ении точности его останова одновременно с расмормаживанием электродвигателя увеличивают двигательный момент электродвигателя до величины статического момента нагрузки, осуществляя уравновешивание лифта, ука- занное движение на установившейся частоте вращения осуществляют при работе электродвигателя на регулировочных характеристиках, при замедлении тормозные моменты формируют при работе электродвигателя лшчь на обмотке
19
низшей частоты вращения с одновременным позиционированием, обеспечивая в заданную точку останова по заданному закону управления, независимо от величины и знака момента нагрузки.
2. Устройство для управления электроприводом лифта с двухскоростным асинхронным электродвигателем, содержащее управляемый преобразователь и управляемьш вьтрямитель с системой импульсно-фазового управления, датчи частоты вращения, регулятор частоты вращения и управляющий блок с одним входом и тремя выходами, силовые входы управляемых преобразователя и выпрямителя и первый трехфазный вход системы импульсно-фазового управления объединены и предназначены для подключения к питающей сети, выход управляемого выпрямителя предназначен для подключения к обмотке низшей частоты вращения электродвигателя, силовой выход управляемого преобразователя предназначен для подключения к обмотке высшей частоты вращения электродвигателя, отличающееся тем, что, с целью повышения производительности лифта и повьшения точности его останова, . введены распределитель импульсов, переключающий блок, регулятор приращения положения, блок обработки входных команд, задатчик интенсивности, блок синхронизации, генератор тактовых импульсов, блок защиты, управляемый преобразователь снабжен дополнительными выходами, управляющи блок снабжен вторым и третьим входа- ми, первый вход блока обработки входных команд предназначен для подачи внешних команд задания, второй и третий входы блока обработки входных команд соединены .соответственно с первым и вторым выходами блока защиты, первый вход- которого соединен с дополнительным выходом управляемого преобразователя, первый выход блока обработки входных команд предназначен для подключения к управляющей цепи электромеханического тормоза, второй выход блока обработки входных команд подключен к пepвo ry входу управляющего блока, второй и третий входы .которого соединены соответственно с первым и вторым выходами ге-. нератора тактовых импульсов, первый выход управляющего блока подключен
to
f5
20
25
,„ 30752820
к первому входу задатчика интенсивности, второй, третий, четвертый, пятый и шестой входы которого соединены соответственно с третьим, четвертым, пятым выходами генератора тактовых импульсов, третьим выходом блока обработки входных команд, вторым выходом управляющего блока, первый выход задатчика интенсивности соединен jC первым входом блока синхронизации, второй, третий, четвертый, пятый входы которого соединены соответственно с пятым выходом генератора тактовых, импульсов, первым и вторым выходами датчика частоты вращения, ше- стьм выходом генератора тактовых импульсов, первый, второй и третий выходы блока синхронизации соединены соответственно с первым, вторым и . третьим входами регулятора приращения положения, четвертый и пятый входы которого подключены к второму выходу управляюрдего блока и к третьему выходу блока обработки входных команд, первый, второй и третий выходы регулятора приращения положения соединены соответственно с первым,вторым и третьим входами регулятора частоты вращения, четвертьш, пятый, шестой и седьмой входы которого соединены соответственно с вторым выходом задатчика интенсивности, вторым выходом управляющего блока, четвертым и пятым выходами блока синхронизации, первый и второй выходы регулятора частоты вращения подключены соответственно к BTopoNry входу системы импульсно-фазового управления и четвертому входу блока обработки входных команд, первый и второй выходы переключающего блока соединены соответственно с первым и вторым входами распределителя импульсов, третий выход переключающего блока подключен к объединенным третьему входу распределителя импульсов , третьему входу системы импульсно-фазового управления и восьмому входу регулятора частоты вращения, четвертьш выход переключающего блока соединен с четвертым входом системы импульсно-фазового управления, первый щестиканальный выход системы импульсно-фазового управления соединен с
четвертым шестиканальным входом распределителя импульсов , первый, второй, третий, четвертый, пятый входы переключающего блока соединены соответственно с вторьтм выходом системы
30
35
45
50
55
импульсно-фазового управленияi вторым выходом датчика частоты вращения третьим входом управляющего блока, вторым выходом управляющего блока, вторым выходом генератора тактовых импульсов, первый десятиканальный вы ход распределителя импульсов соединен с управляющим десятиканальным входом управляемого пpeoбpaзoвaтeля второй и третий выходы распределителя импульсов соединены с управляющими входами управляемого вьтрямителя, третий и четвертьй выходы системы импульсно-фазового управления соединены соответственно с вторым и третьим входами блока защиты,
3. Устройство по п. 2, отличающееся
тем, что регулятор
частоты вращения содержит интегрирующий, пропорциональный и суммирующий усилители, первый, второй и третий ключи, первый и второй инверторы, цифроаналоговьй преобразователь, блок регистров, мультиплексор и блок счетчиков, первьш, второй и-третий входы которого образуют соответственно первый, второй и седьмой входы регулятора частоты вращения, выход блока счетчиков соединен с первым входом блока регистров, второй вход которого подключен к выходу первого инвертора, вход которого образует щестой вход регулятора част.оты вращения, первый, второй, третий и четвертый выходы блока регистров соединены соответственно с первым входом цифроаналогового преобразователя и с первым, вторым и третьим входами мультиплексора, выход которого образует второй выход регулятора частоты вращения, второй вход дифроаналого- вого преобразователя образует третий вход регулятора частоты вращения, первые входы интегрирующего и пропорционального усилителей и первые выходы- первого и второго ключей объединены и подключены к выходу цифро- аналогового преобразователя, входы первого и второго ключей объединены и подключены к выходу второго инвертора, вход которого образует восьмой вход регулятора частоты вращения, i второй выход первого ключа соединен с вторым входом интегрирующего усилителя, третий вход которого подключен к первому выходу третьего ключа,, вход которого образует пятый вход . регулятора частоты вращения, выход
5
0
5
интегрирующего усилителя и второй выход третьего ключа объединены и Соединены с первьм входом суммирующего усилителя, второй выход второго ключа соединен с вторым входом пропорционального ус:илителя, выход которого подключен к второму входу суммирующего усилителя, третий- вход и выход которого образуют соответственно четвертью вход и первьй выход регулято- а частоты вращения.
4. Устройство по п. 2, отличающееся тем, что регулятор.
лриращения положения содержит блок цифроаналогового преобразователя, первый, второй и третий счетчики, блок коммутатора каналов, три инвертора и логический элемент И-НЕ, первьш вход которого объединен с первым входом блока коммутатора каналов и образует второй вход регулятора прира-щения положения, выход логического элемента И-НЕ через первый инвертор соединен с вторым входом блока коммутатора каналов, третий вход которого объединен с вторым входом логического элемента Й-НЕ и образует первый вход регулятора приращения положения, четвертый вход блока коммутатора каналов образует третий вход регулятора приращения положения, пятый вход блока коммутатора каналов соединен с выходом второго инвертора, вход которого образует пятый вход регулятора приращения положения, первый и второй выходы блока коммутатора каналов соединены соответственно с первым и вторым входом первого счетчика и образ-уют первый и второй выходы регулятора приращения положения, первый и второй выходы первого счетчика соединены соответственно с первым и вторым входами второго счет- ., чика, первый и второй выходы которого соединены с первым и вторым входами третьего счетчика, третьи входы первого, второго и третьего счетчиков объединены и подключены к выходу третьего инвертора, вход которого образует четвертьй вход регулятора приращения положения, выход третьего счетчика и третьи выходы второго и первого счетчиков соединены соответственно с первым, вторым и третьим входами блока цифроаналогового преобразователя, выход которого образует третий выход регулятора приращения положения.
0
5
0
0
5
5. Устройство по п. 2, отличающееся тем, что переключающий блок содержит первую и вторую схемы выдержки времени, первый и второй инверторы, логический элемент И-НЕ, задатчик режима работы, первый, второй и третий коммутаторы каналов, первые входы первого, второго и третьего коммутаторов каналов объединены и подключены к выходу первого инвер тора, вход которого образует четвер- тьй вход переключающего блока, вторые входы первого, второго и третьего коммутаторов каналов объединены и образуют первый вход переключающего блока, третьи входы первого, второго и третьего коммутаторов каналов объединены и образуют второй вход переключающего блока, четвертые входы первого, второго и третьего коммутаторов каналов объединены и образуют третий вход переключающего блока, выходы первого, второго и третьего коммутаторов каналов соединены с первыми входами соответственно первой и второй схем вьщержки времени и логического элемента И-НЕ, вторые входы первой и второй схем вьщержки времени соединены соответственно с первым и вторым выходами задатчика режима работы, тре°тий выход которого подключен к второму входу логического элемента И-НЕ, выход которого соединен с входом второго инвертора, выход
f5
усилитель, управляемый генератор, блок формирования знака, блок синхр низации, блок контроля напряжения, блок счетчиков, блок D-триггеров, блок формирования импульсов сброса, блок контроля фазировки, первый, вт рой и третий входы блока переключе ния и адаптации образуют соответственно второй, четвертый и третий вх - ды системы импульсно-фазового управ ления, первый, второй и третий выхо ды блока переключения и адаптации соединены соответственно с первым входом суммрруюшего усилителя, первым входом блока извлечения модуля входом блока форьгарования знака, пе вьш выход которого образует второй выход системы импульсно-фазового управления, а второй выход блока формирования знака соединен с вторым входом блока извлечения модуля, выход которого подключен к второму вхо ду суммирующего усилителя, подсоединенного выходом к входу управляемого генератора, первый, второй и третий входы блока синхронизации образуют первьй трехфазный вход системы импульсно-фазового управления, первый выход блока синхронизации подключен 30 к входу блока контроля напряжения, выход которого образует четвертый вькод системы импульсно-фазового управления, второй выход блока синхронизации соединен с первыми входами
20
25
которого образует третий выход пере- -35 блока счетчиков и блока D-триггеров ключающего блока, четвертый выход и со входами блока формирования имзадатчика режима работы образует четвертый выход переключающего блока, пя7Ъ1е входы первого, второго и третьего коммутаторов каналов объединены и подключены к пятому выходу задатчика режима работы, объединенные третьи входьт первой и второй схем вьщержки времени образуют пятый вход переключающего блока, выход первой схемы вьщержки времени соединен с четвертым входом второй.схемы выдержки времени и образует первый выход переключающего блока, выход второй схемы вьщержки времени соединен с четвертым входом первой схемы выдержки времени и образует второй выход переключающего блока.
6. Устройство по По 2, отличающееся тем, что система импульсно-фазового управления содержит блок переключения и адаптации, блок извлечения модуля, суммирующий
, е f5
усилитель, управляемый генератор, блок формирования знака, блок синхро- низации, блок контроля напряжения, блок счетчиков, блок D-триггеров, блок формирования импульсов сброса, блок контроля фазировки, первый, второй и третий входы блока переключения и адаптации образуют соответственно второй, четвертый и третий вхо- ды системы импульсно-фазового управления, первый, второй и третий выходы блока переключения и адаптации соединены соответственно с первым входом суммрруюшего усилителя, первым входом блока извлечения модуля и входом блока форьгарования знака, пер- вьш выход которого образует второй выход системы импульсно-фазового управления, а второй выход блока формирования знака соединен с вторым входом блока извлечения модуля, выход которого подключен к второму входу суммирующего усилителя, подсоединенного выходом к входу управляемого генератора, первый, второй и третий входы блока синхронизации образуют первьй трехфазный вход системы импульсно-фазового управления, первый выход блока синхронизации подключен 30 к входу блока контроля напряжения, выход которого образует четвертый вькод системы импульсно-фазового управления, второй выход блока синхронизации соединен с первыми входами
20
25
40
пульсов сброса и блока контроля фазировки, выход которого образует третий выход системы импульсно-фазсвого управления, выходы блока счетчиков и блока формирования импульсов сброса соединены соответственно с вторым и третьим входами блока D-триггеров, выход которого образует первый шести- канальный выход системы импульсно- фазового управления, выход управляемого генератора соединен с вторым входом блока счетчиков.
Q 7. Устройство по п. 2, отличающееся тем, что распределитель импульсов содержит генератор промежуточной частоты, первую, вторую третью, четвертую, пятую, шестую,
седьмую, восьмую, девятую, десятую схемы совпадения, первую, вторую схемы объединения, блок импульсных трансформаторов, первые входы первой и второй схем совпадения объединены и
25
образуют третий вход распределителя импульсов, объединенные первые входы седьмой, восьмой, девятой, десятой схем совпадения и первой и второй схем объединения образуют второй вход распределителя импульсов, второй вход первой схемы объединения образует первый канал четвертого шестиканаль-г ного входа распределителя импульсов, второй вход второй схемы объединения образует второй канал четвертого шес- тиканального входа распределителя импульсов, объединенные первые входы третьей, четвертой, пятой, шестой схем совпадения и третьи входы первой и второй схем объединения образуют первый вход распределителя импульсов, объединенные вторые входы шестой и десятой схем совпадения образуют третий канал четвертого шестиканаль- ного входа распределителя импульсов, объединенные вторые входы пятой и девятой схем совпадения образуют четвертый канал четвертого шестиканаль- ного входа распределителя импульсов, объединенные вторые входы второй, четвертой и восьмой схем совпадения образуют пятый канал четвертого шее тиканального входа распределителя . Цд
вх.З
7528
26
5 10 1520 . пульсов, объединенные вторые входы первой, третьей и седьмой схем совпадения образуют шестой канал четвертого шестиканального входа распределителя импульсов, выход генератора промежуточной частоты соединен с третьими входами первой, второй, третьей, четвертой, пятой, шбстой, седьмой, восьмой, девятой и десятой схем совпадения и с четвертыми входами первой и второй схем объединения, выходы первой, второй, третьей, четвертой, пятой, шестой, седьмой, восьмой, девятой, десятой схем совпадения и первой и второй схем объединения подключены соответственно к первому, второму, третьему, четвертому, пятому, шестому, седьмому, восьмому, девятому, десятому, одиннадцатому и двенадцатому входам блока импульсных трансформаторов, первьй и второй выходы которого образуют соответственно второй и третий выходы распредет лителя импульсов, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый выходы блока импульсных трансфор- моторов образуют первый десятиканаль- ный выход распределителя икпульсов.
1бхЗ
0
16
П
27
бд.- биб FS в
&U
К
гз
быхг
fl.Z/iufto/
/узд:
.
Л
г.З
Д 5 ч гг
/I
2
ФиУ.6
Составитель С. Позднухов Редактор А. Долинич Техред В.Кадар . Корректоре. Шекмар
1638/52
Тираж 661Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно
-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4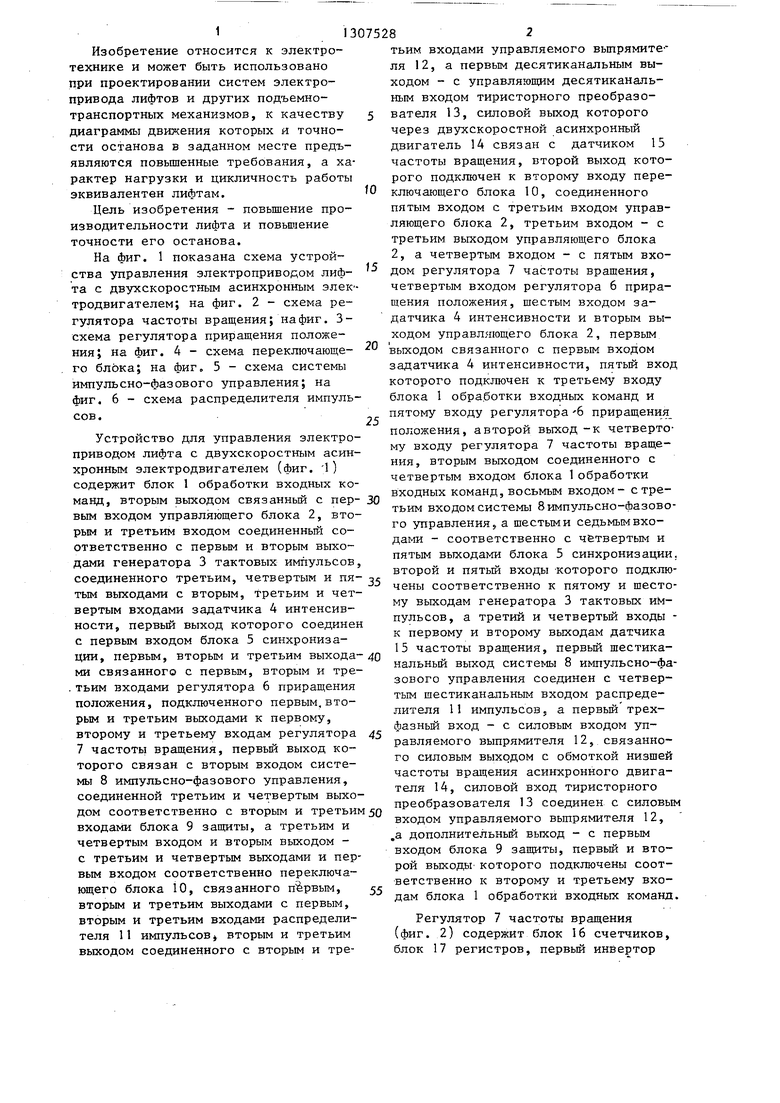
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления пуском скоростного лифта | 1984 |
|
SU1320156A1 |
| Цифровая следящая система | 1980 |
|
SU962845A1 |
| Способ управления асинхронным электродвигателем лифта и устройство для его осуществления | 1988 |
|
SU1690159A1 |
| Устройство для управления частотой вращения ротора асинхронного электродвигателя | 1984 |
|
SU1277343A1 |
| Устройство для управления пуском скоростного лифта | 1984 |
|
SU1414745A1 |
| Устройство для программного управления бандажировочным станком | 1989 |
|
SU1725187A1 |
| Устройство для программного управления намоточным станком | 1990 |
|
SU1784942A1 |
| Устройство для программного управления намоточным станком | 1989 |
|
SU1725184A1 |
| СПОСОБ УПРАВЛЕНИЯ ЧАСТОТНЫМ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2081503C1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |


| Монтаж лифтов и канатных дорог | |||
| Справочник строителя | |||
| М.; Стройиздат, 1983, с | |||
| Рогульчатое веретено | 1922 |
|
SU142A1 |
| Устройство для управления асинхронным электродвигателем с короткозамкнутым ротором и двумя независимыми статорными обмотками с различным числом полюсов | 1981 |
|
SU1030941A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
