Изобретение относится к робототехнике и может быть использовано, например, в системах программного управления измерительными роботами.
Цель изобретения - упрощение способа путем сокращения объема запоминаемой в системе управления робота информации.
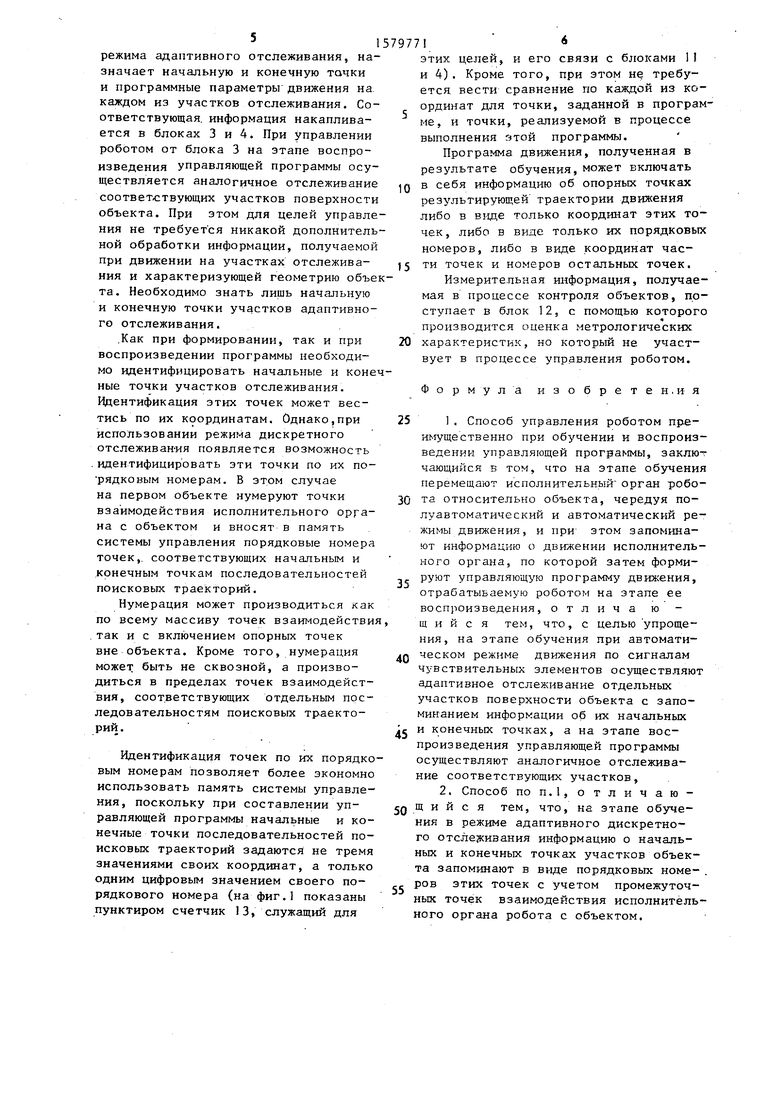
На фиг.1 показана блок-схема устройства, реализующего данный способ; на фиг.2 - последовательность поисковых траекторий (ПТ) движения исполнительного органа робота при дискретном отслеживании одного из участков поверхности объекта.
Устройство для осуществления способа содержит систему 1 управления робота, заданный орган 2, программно- задающий блок 3, блок 4 памяти, ключи 5-7, блок 8 управления приводами, приводы 9, исполнительный орган 10 робота, блок 11 датчиков, блок 12 обработки измерительной информации и счетчик 13. На фиг.2 обозначено: К - участок поверхности (контура) объекта I и II - начальная и конечная точки движения при отслеживании участка контура объекта с помощью последовательности элементарных поисковых траекторий,
ел
4
СО
ч1
vj
ПТ - элементарная поисковая траектория.
Исполнительный орган робота оснащен датчиками по каждой степени подвижности и, кроме того, имеет специальный чувствительный элемент, например, измерительную головку, устанавливаемую на конечном звене робота, при помощи которой он взаимодействует с поверхностью объекта. Информация от датчиков и чувствительного элемента используется для управления движением робота и для определения координат точек взаимодействия исполнительного органа робота с измеряемым объектом.
Способ осуществляется следующим образом.
На первом объекте оператор, воздействуя через задающий орган 2, ключ 5 и блоки 8 и 9, подводит исполнительный орган 10 робота из исходной точки к начальной точке взаимодействия с объектом. Информация о координатах этой точки, а также всех последующих, необходимых для формирования программы движения робота, поступает от датчиков 11 через ключ 7 в блок 4 памяти.
Процесс обучения (формирования программы) оператор осуществляет по визуальной информации об измеряемом объекте и положении относительно него измерительной головки робота. При этом оператор с помощью задающего органа 2 перемещает измерительную голов ку робота относительно объекта лишь в ограниченном количестве точек взаимодействия головки с объектом, а на других участках поверхности объекта движение осуществляется автоматически в режиме адаптивного отслеживания, т.е. происходит чередование полуавтоматического и автоматического режимов движения.
Отслеживание поверхности измеряемого объекта может быть как непрерывным так и дискретным. В режиме непрерывного адаптивного отслеживания (при использовании измерительных головок от клонения) реализуется постоянный контакт наконечника головки с поверхностью объекта. В режиме дискретного адаптивного отслеживания (при использовании измерительных головок любого
типа - касания или отклонения) осуществляется взаимодействие измерительной головки с дискретным рядом то
10
20
25
чек на поверхности объекта. Например, при дискретном отслеживании (фиг.2) результирующая траектория движения исполнительного органа робота образуется из последовательности элементарных поисковых траекторий, каждая из которых начинается в4очередной точке взаимодействия измерительной головки с объектом и продолжается до следующего взаимодействия. Поскольку конфигурация поисковых траекторий выбирается так, чтобы охватывать локальный участок контура, то даже при произвольJ5 ной его ориентации всегда происходит взаимодействие головки с объектом при отработке каждой поисковой траектории. Элементарные поисковые траектории могут быть различными по конфигурации : разомкнутыми или замкнутыми, кусочно-составными или цельно-гладкими и т.д.
Для реализации дискретного отслеживания, т.е. очередной последовательности поисковых траекторий, оператор задает программные параметры движения на блок 3, а также, пользуясь ключом 6, - на блок 4. К этим параметрам относятся геометрические параметры поисковых траекторий (их конфигурация, размерные характеристики, топологические особенности и т.п.) необходимая ориентация поисковых траекторий в пространстве для конкретного участка объекта, технологические
режимы измерения (выбор измерительного наконечника из имеющегося набора, назначение скоростей движения и т.д.).
На интервалах полуавтоматического движения оператор может задавать промежуточные точки, не лежащие на поверхности объекта, т.е. точки, задаваемые не для измерения объекта, а для формирования относительно него траектории движения исполнительного органа робота. Эти точки вместе с точками на поверхности объекта (в том числе вместе с начальными и конечными точками движения на участках отслеживания) являются опорными точками траектории движения и вносятся в память системы управления.
При формировании программы движения таким образом оператор в полуавтоматическом режиме задает опорные точки траектории движения исполнительного органа, а также подает сигналы на начало и окончание автоматического
30
40
45
50
55
режима адаптивного отслеживания, назначает начальную и конечную точки и программные параметры движения на каждом из участков отслеживания. Соответствующая, информация накапливается в блоках 3 и 4. При управлении роботом от блока 3 на этапе воспроизведения управляющей программы осуществляется аналогичное отслеживание соответствующих участков поверхности объекта. При этом для целей управления не требуется никакой дополнительной обработки информации, получаемой при движении на участках отслеживания и характеризующей геометрию объета. Необходимо знать лишь начальную и конечную точки участков адаптивного отслеживания.
.Как при формировании, так и при воспроизведении программы необходимо идентифицировать начальные и коненые точки участков отслеживания. Идентификация этих точек может вестись по их координатам. Однако,при использовании режима дискретного отслеживания появляется возможность .идентифицировать эти точки по их по- рядковым номерам. В этом случае на первом объекте нумеруют точки взаимодействия исполнительного органа с объектом и вносят в память системы управления порядковые номера точек,, соответствующих начальным и конечным точкам последовательностей поисковых траекторий.
Нумерация может производиться как по всему массиву точек взаимодействия так и с включением опорных точек вне объекта. Кроме того, нумерация может быть не сквозной, а производиться в пределах точек взаимодействия, соответствующих отдельным последовательностям поисковых траекторий.
Идентификация точек по их порядковым номерам позволяет более экономно использовать память системы управления, поскольку при составлении управляющей программы начальные и конечные точки последовательностей поисковых траекторий задаются не тремя значениями своих координат, а только одним цифровым значением своего порядкового номера (на фиг.1 показаны пунктиром счетчик 13, служащий для
0
5
0
5
0
5
0
5
0
5
этих целей, и его связи с блоками 11 и 4). Кроме того, при этом не требуется вести сравнение по каждой из координат для точки, заданной в программе, и точки, реализуемой в процессе выполнения этой программы.
Программа движения, полученная в результате обучения, может включать в себя информацию об опорных точках результирующей траектории движения либо в виде только координат этих точек , либо в виде только их порядковых номеров, либо в виде координат части точек и номеров остальных точек.
Измерительная информация, получаемая в процессе контроля объектов, поступает в блок 12, с помощью которого производится оценка метрологических характеристик, но который не участвует в процессе управления роботом.
Формула изобрете н.и я
1. Способ управления роботом преимущественно при обучении и воспроизведении управляющей программы, заключающийся в том, что на этапе обучения перемещают исполнительный орган робота относительно объекта, чередуя полуавтоматический и автоматический режимы движения, и при этом запоминают информацию о движении исполнительного органа, по которой затем формируют управляющую программу движения, отрабатываемую роботом на этапе ее воспроизведения, отлича ю - щ и и с я тем, что, с целью упрощения, на этапе обучения при автоматическом режиме движения по сигналам чувствительных элементов осуществляют адаптивное отслеживание отдельных участков поверхности объекта с запоминанием информации об их начальных и конечных точках, а на этапе воспроизведения управляющей программы осуществляют аналогичное отслеживание соответствующих участков,
2. Способ поп.1, о тличаю- щ и и с я тем, что, на этапе обучения в режиме адаптивного дискретного отслеживания информацию о начальных и конечных точках участков объекта запоминают в виде порядковых номеров этих точек с учетом промежуточных точек взаимодействия исполнительного органа робота с объектом.
W.jЈ
Изобретение относится к робототехнике и может быть использовано, например, в системах программного управления измерительными роботами. Целью изобретения является упрощение способа управления роботом в режимах обучения и воспроизведения управляющей программы. Для этого на этапе обучения оператор, чередуя полуавтоматическое управление и автоматическое, осуществляет перемещение исполнительного органа робота по поверхности объекта. Информация о движении исполнительного органа запоминается в системе управления робота и затем по ней формируется соответствующим образом управляющая программа. При этом в режиме автоматического управления производится адаптивное отслеживание отдельных участков контура объекта с помощью чувствительных элементов, например измерительной головки, установленной на конечном звене робота. На этапе воспроизведения управляющей программы осуществляется аналогичное адаптивное отслеживание соответствующих участков измеряемого объекта. 1 з.п. ф-лы, 2 ил.
Редактор А.Шандор
Составитель И.Афонин
Техред М.Ходанич Корректор М.Пожо
Заказ 1983
Тираж 699
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ С(СР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
Подписное
| Кулешов B.C | |||
| и др | |||
| Дистанцион- но-управляемые роботы и манипуляторы | |||
| - М.: Машиностроение, 1986, с.31 и 32. |
