3U951U
ностью соединения - ориентацию рабо- за перемещением нижней части имитато- чего органа относительно запрограм- ра 20, а рамка 25 и вал 21 - вслед мированной траектории. Рамки 8 и 9 за перемеп;ением верхней части рабо- и вал 3 будут поворачиваться вслед - чего органа 1 з.п. ф-лы, А ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания промышленных роботов-манипуляторов | 1987 |
|
SU1425078A1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ ШАГАЮЩИМ КОПИРУЮЩИМ РОБОТОМ | 1997 |
|
RU2134193C1 |
| Тренажер транспортного средства | 1987 |
|
SU1508265A1 |
| СПОСОБ КАЛИБРОВКИ СЕНСОРОВ КОЛЕСНОЙ ОДОМЕТРИИ | 2023 |
|
RU2821391C1 |
| АДАПТИВНЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ РОБОТ | 2002 |
|
RU2224637C1 |
| ЭКСПЕРТНАЯ СИСТЕМА НА БАЗЕ МЕДИЦИНСКОГО МАНИПУЛЯЦИОННОГО РОБОТА ДЛЯ ТРАНСПЕДИКУЛЯРНОЙ ФИКСАЦИИ ПОЗВОНОЧНИКА | 2023 |
|
RU2833780C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЧАЛЬНЫХ УСЛОВИЙ НЕЛИНЕЙНОЙ ТРАЕКТОРИИ ВОЗДУШНОЙ ЦЕЛИ | 2011 |
|
RU2483272C2 |
| СИСТЕМА КОРРЕКЦИИ ТРАЕКТОРИИ ДВИЖЕНИЯ МАНИПУЛЯТОРА | 2011 |
|
RU2462745C1 |
| Задающее устройство для дистанционного управления роботом-манипулятором | 1988 |
|
SU1516344A1 |
| СПОСОБ И СИСТЕМА ПЛАНИРОВАНИЯ ДВИЖЕНИЯ РОБОТА-МАНИПУЛЯТОРА ПУТЕМ КОРРЕКЦИИ ОПОРНЫХ ТРАЕКТОРИЙ | 2020 |
|
RU2756437C1 |
Изобретение относится к машиностроению и может быть использовано для оценки качества функционирования роботов-манипуляторов, рабочий орган которых перемещается по заданному контуру, например при сварке, окраске, нанесении покрытий и т.п. Цель изобретения - расширение технологических возможностей путем определения ориентации рабочего органа в пространстве. При перемещении имитатора 20 рабочего органа, закрепленного на выходном звене робота - манипулятора, по требуемой траектории в режиме обучения в память системы управления заносится информация о координатах узловых точек, скорости и характере движения между точками. Одновременно с этим в память вычислительного блока программно заносится информация о частоте опроса датчиков 5,12,13,23 и 27 угла поворота. При воспроизведении программы точка соединения тросов 16 и 17 будет описывать в пространстве траекторию, соответствующую запрограммированной траектории движения рабочего органа, а угол между прямой, проходящей через точку соединения тросов 16,17 и точку крепления троса 29 и поверхностью соединения - ориентацию рабочего органа относительно запрограммированной траектории. Рамки 8 и 9 и вал 3 будут поворачиваться вслед за перемещением нижней части генератора 20, а рамка 25 и вал 21 - вслед за перемещением верхней части рабочего органа. 1 з.п. ф-лы, 4 ил.
Изобретение относится к машиностроению и может быть использовано для оценки качества функционирования роботов-манипуляторов, рабочий орган которых перемещается по заданному контуру, например при сварке, окраске, нанесении покрытий и т.п.
Целью изобретения является расширение технологических возможностей путем определения ориентации рабочего органа в пространстве.
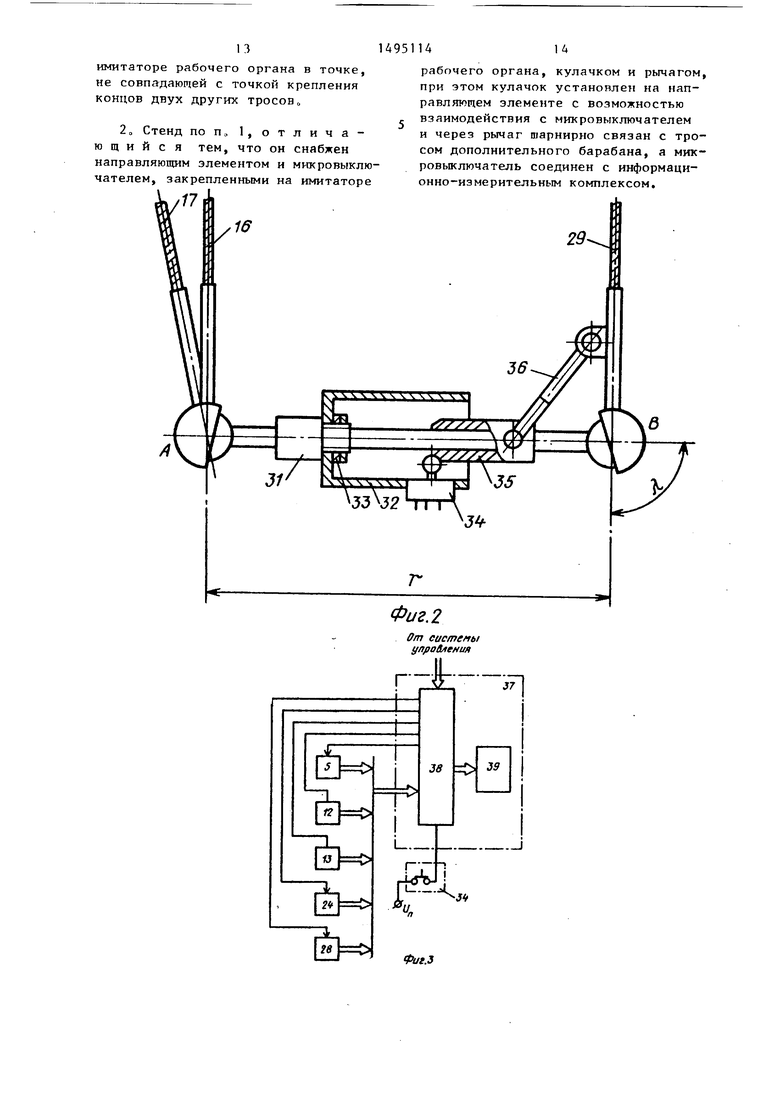
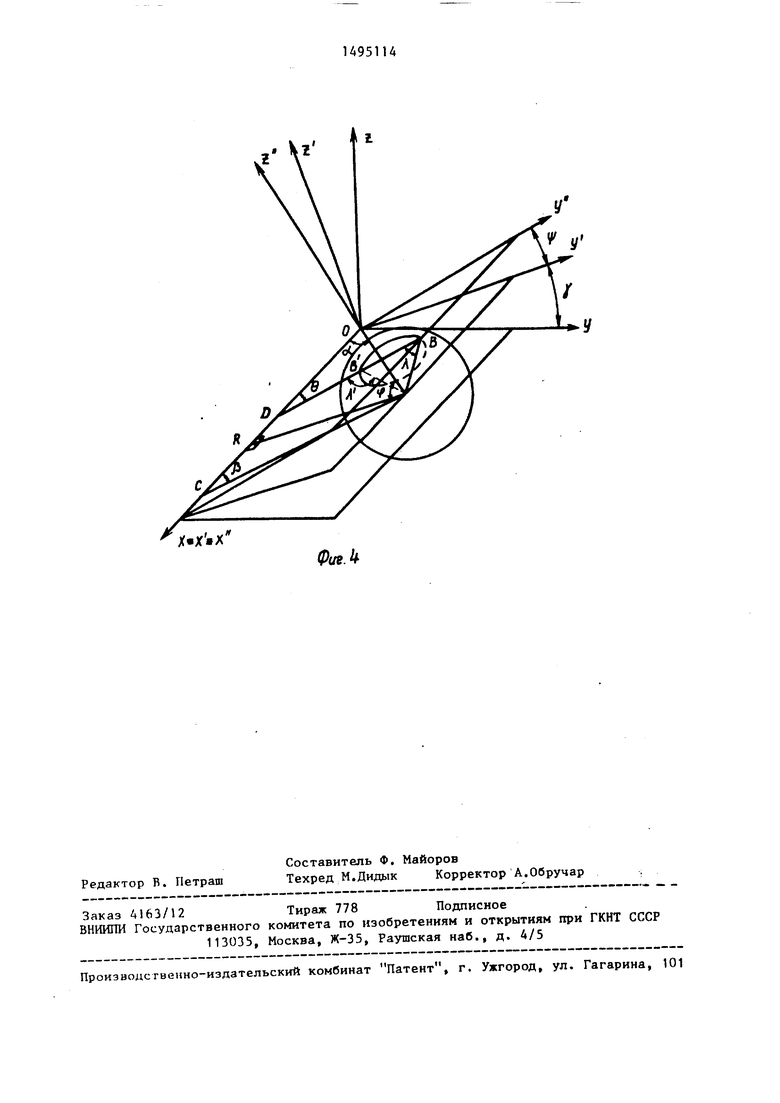
На фиг. 1 приведен стенд, общий вид; на фиг. 2 - имитатор рабочего органа; на фиг. 3 - блок-схема информационно-измерительного комплекса стенда; на фиг. 4 - расчетная схема для определения координат точек А и В.
Стенд для испытания промышленных роботов-манипуляторов содержит установленный на основании 1 первый кронштейн 2, на котором с возможностью поворота установлен коленчатый вал 3, связанный через мультипликатор А с датчиком 5 угла поворота. На концах вала 3 жестко закреплены второй 6 и третий 7 кронштейны. В кронштейнах 6 и 7 с возможностью поворота расположены соответственно рамки 8 и 9, которые через мультипликаторы 10 и 11 соединены с датчиками 12 и 13 угла поворота. На противоположных сторонах рамок 8 и 9 установлены барабаня 14 и 15 для намотки тросов 16 и 17 и направляющие 18 и 19 для этих тросов. Тросы 16 и 17 одним концом закреплены на вращающихся барабанах 14 и 15, а другими связаны между собой и шарнирно закреплены в нижней части имитатора 20 рабочего органа робота-манипулятора
В колене вала 3 установлен второ вал 21, связанный через мультипликатор 22 с датчиком 23 угла поворота На валу 21 жестко закреплен четвертый дополнительный кронштейн 24, в котором г возможностью поворота рас положрна дополнительная рамка 25 Рамкя 25 через мультипликатор 26
0
5
0
5
0
5
0
5
соединена с датчиком 27 угла поворота. На противоположных сторонах рамки 25 установлены дополнительные подпружиненный барабан 28 для намотки троса 29 и направляющая 30 для этого троса. Трос 29 одним концом закреплен на вращающемся барабане
28,а другим шарнирно закреплен в верхней части.имитатора 20 робота- манипулятора.
Имитатор 20 рабочего органа выполнен в виде направляющего элемента (стержня) 31, на котором закреплен корпус 32 с помощью гайки 33.-Внутри корпуса установлен микровыключатель 34о На стержне 31 с возможностью перемещения вдоль и вокруг оси стержня 31 установлен кулачок 35, который связан через рычаг 36 с тросом
Информационно-измерительный комплекс 37 состоит из последовательно соединенных вычислительного блока 38 и цифропечатающего устройства 39. Выходы датчиков 5,12,13,23 и 27 угла поворота соединены с первым входом вычислительного блока 38, второй вход которого связан с микровыключателем 34 имитатора 20 рабочего органа, а третий - с выходом устройства управления испытуемого робота-манипулятора. Вторые выходы вычислительного блока 38 связаны с управляющими входами датчиков 5, 12,13,23 и 27 угла поворота.
Стенд работает следующим образом.
Оператор с помощью пульта управления вьгоодит имитатор 20 рабочего органа, закрепленный на выходном звене робота-манипулятора, в начальную точку требуемой (эталонной) траектории его движения, в качестве которой могут быть использованы, например, прямые линии, ломаные, синусоидальные и др. кривые, окружности. После этого на третий вход вычислительного блока 38 от устройства управления роботом поступает сиг5
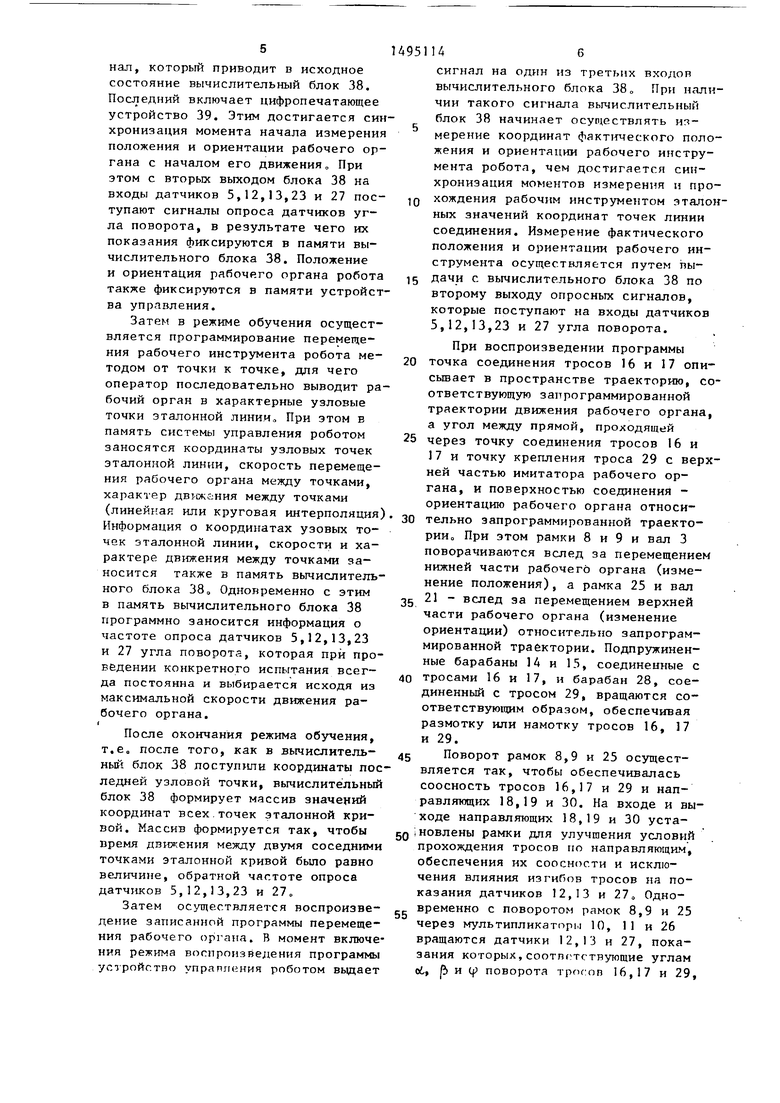
нал, который приводит в исходное состояние вычислительный блок 38. Последний включает цифропечатающее устройство 39. Этим достигается синхронизация момента начала измерения положения и ориентации рабочего органа с началом его движения. При этом с вторых выходом блока 38 на входы датчиков 5,12,13,23 и 27 поступают сигналы опроса датчиков угла поворота, в результате чего их показания фиксируются в памяти вычислительного блока 38. Положение и ориентация рабочего органа робота также фиксируются в памяти устройства управления.
Затем в режиме обучения осуществляется программирование перемещения рабочего инструмента робота методом от точки к точке, для чего оператор последовательно выводит рабочий орган в характерные узловые точки эталонной линии. При этом в память системы управления роботом заносятся координаты узловых точек эталонной линии, скорость перемещения рабочего органа между точками, характер движ&ния между точками (линей1 ая или круговая интерполяция) Информация о координатах узовых точек эталонной линии, скорости и характере движения между точками заносится также в память вычислительного блока 38о Одновременно с этим в память вычислительного блока 38 программно заносится информация о частоте опроса датчиков 5,12,13,23 и 27 угла поворота, которая при проведении конкретного испытания всегда постоянна и выбирается исходя из максимальной скорости движения рабочего органа. (
После окончания режима обучения, т.е. после того, как в вычислительный блок 38 поступили координаты последней узловой точки, вычислительный блок 38 формирует массив значений координат всех.точек эталонной кривой. Массив формируется так, чтобы время движения между двумя соседними точками эталонной кривой было равно вешичине, обратной частоте опроса датчиков 5,12,13,23 и 27„
Затем осуществляется воспроизведение записанной программы перемещения рабочего органа. В момент включения режима воспроизведения программы устройство упраппения роботом вьщает
951U6
сигнал на один из третг их входов вычислительного блока 38„ При наличии такого сигнала вычислительный блок 38 начинает осуществлять измерение координат факт1гческого положения и ориентации рабочего инструмента робота, чем достигается синхронизация моментов измерения и хождения рабочим инструментом эталонных значений координат точек линии соединения. Измерение фактического положения и ориентации рабочего инструмента осуществляется путем пы15 дачи с вычислительного блока 38 по второму выходу опросных сигналов, которые поступают на входы датчиков 5,12,13,23 и 27 угла поворота.
При воспроизведении программы
20 точка соединения тросов 16 и 17 спи- сьшает в пространстве траекторию, соответствующую запрограммированной траектории движения рабочего органа, а угол между прямой, проходящей
25 через точку соединения тросов 16 и 17 и точку крепления троса 29 с верхней частью имитатора рабочего органа, и поверхностью соединения - ориентацию рабочего органа относи- 30 тельно запрограммированной траекто- риИо При этом рамки 8 и 9 и вал 3 поворачиваются вслед за перемещением нижней части рабочего органа (изменение положения), а рамка 25 и вал
25 21 - вслед за перемещением верхней части рабочего органа (изменение ориентации) относительно запрограммированной траектории. Подпружиненные барабаны 14 и 15, соединенные с
40 тросами 16 и 17, и барабан 28, соединенный с тросом 29, вращаются соответствующим образом, обеспечивая размотку или намотку тросов 16, 17 и 29.
45 Поворот рамок 8,9 и 25 осуществляется так, чтобы обеспечивалась соосность тросов 16,17 и 29 и направляющих 18,19 и 30. На входе и выходе направляющих 18,19 и 30 устаgg i новлены рамки для улучшения условий прохождения тросов по нaпpaвляющRM, обеспечения их соосности и исключения влияния изгибов тросов на показания датчиков 12,13 и 27, Одновременно с поворотом рамок 8,9 и 25 через мультипликатор, 10, 1 1 и 26 вращаются датчики 12,13 и 27, показания которых, соотп(;тствутощие углам об, |i и ф поворота трогпп 16,17 и 29,
55
фиксируются вычислительным блоком 38. Одновременно с помощью датчика 5 угла поворота, связанного через муль типликатор 4 с валом 3, и датчика 23, связанного через мультипликатор 22 с валом 21, изменяются углы у и 0 соответственно наклона плоскости расположения тросов 16 и 17 и наклона троса 29.
Если в процессе изменения ориентации имитатора 20 рабочего органа угол А между осями троса 29 и имитатора 20 рабочего органа становится меньше 90 , то кулачок 35 под дей
ствием рычага 36, перемещаясь вдоль стержня 31, включает микровыключатель 34, который выдает сигнал, соответствующий логической единице, в вычислительный блок 38. Если угол равен или больше 90 , то рычаг 36 отводит кулачок 35 от микровыключателя 34, последний находится в выключенном состоянии, и в вычислительный блок 38 подается сигнал, соответствующий логическому нулю.
Таким образом, с помощью датчиков 5,12 и 13 однозначно определяется положение, а с иомогаью датчиков 23 и 27 и микровьЕклю иагеля 34 - ориентация рабочего органа в пространстве
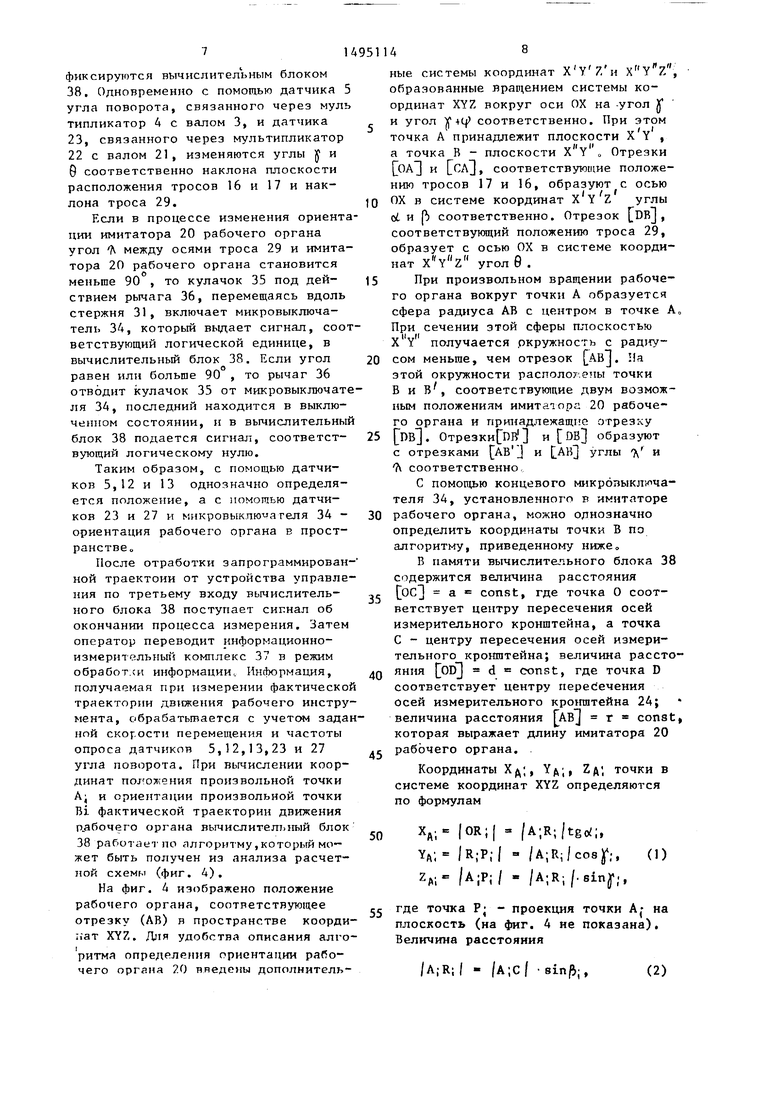
После отработки запрограммированной траектоии от устройства управления по третьему входу вычислительного блока 38 поступает сигнал об окончании процесса измерения. Затем оператор переводит информациоино- измеритлльный комплекс 37 в режим обработ;(и информации. Информация, получаемая при измерении фактической траектории движения рабочего инструмента, обрабатьтается с учетом заданной скорости перемещения и частоты опроса датчиков 5,12,13,23 и 27 угла поворота. При вычислении координат положения произвольной точки А; и ориентации произвольной точки Bi фактической траектории движения р.абочего органа вычислител7,ный блок 38 работает по алгоритму.который может быть получен из анализа расчетной cxeMF.i (фиг. 4).
На фиг. 4 изображено положение рабочего органа, соответствующее отрезку (ЛВ) в пространстве коорди- ;;ат XYZ. Для удобства описания алго- ритма определения ориентации рабочего органа 20 введены дополнитель
951148
ные системы координат X Y 7/и Z, образованные ярап;ением системы координат XYZ вокруг оси ОХ на -угол J и угол f ф соответственно. При этом точка А принадлежит плоскости Х У , а точка В - плоскости X У „ Отрезки ОА и LCAJ, соответствующие положению тросов 17 и 16, образуют с осью 0 ОХ в системе координат X Y Z углы oi. и р) соответственно. Отрезок ВВ , соответствующий положению троса 29, образует с осью ОХ в системе коорди15
25
30
35
20
40
45
50
55
нат угол 0.
При произвольном вращении рабочего органа вокруг точки А образуется сфера радиуса АВ с центром в точке А„ При сечении этой сферы плоскостью X Y получается .окружность с радзту- сом меньше, чем отрезок АВ. На зтой окружности располоу .еиы точки В и в , соответствующие двум возможным положениям имитачора 20 рабочего органа и принадлежащие отрезку . Отрезки ПВ образуют с отрезками fAB J и М углы и 1 соответственно,
С помощью концевого микрояыклх ча- теля 34, установленного в имитаторе рабочего органа, можно однозначно определить координаты точки В по алгоритму, приведенному ниже,
В памяти вычислительного блока 38 содержится величина расстояния рС а const, где точка О соответствует центру пересечения осей измерительного кронштейна, а точка С - центру пересечения осей измерительного кронштейна; величина рассто яния OD d const, где точка D соответствует центру пересечения осей измерительного кро1пптейна 24; величина расстояния ГАВ г const которая выражает длину имитатора 20 рабочего органа. .
Координаты Хд;, Уд;, точки в системе координат XYZ определяются по формулам
Хд; |ORi( |A;R;/tg i,
УА; |R;P,-| - /A;Ri|co8y;, (1)
ZAI /А;Р;/ - /A;R;/. einf;,
где точка P - проекция точки А; на плоскость (на фиг. 4 не показана). Величина расстояния
/A;R;| - |А;с( -sin/J;,
(2)
Величина расстояния
ol; sin Cf;
(A;C
где tf; 180 -oil - P , . Подставляя выражение (3) в (2), a выражение (2) в ( , получим формулы для определения Хд;, Уд; , гд; точки AJ в системе координат XYZ через углы d; , i;, J; :
a sino/ ; sinj ; tg o ; sincf
a sin sin 3 :j cosy2
sinlf,
a j sin sincf;
X..
Ai
YA;
ZA;
(4)
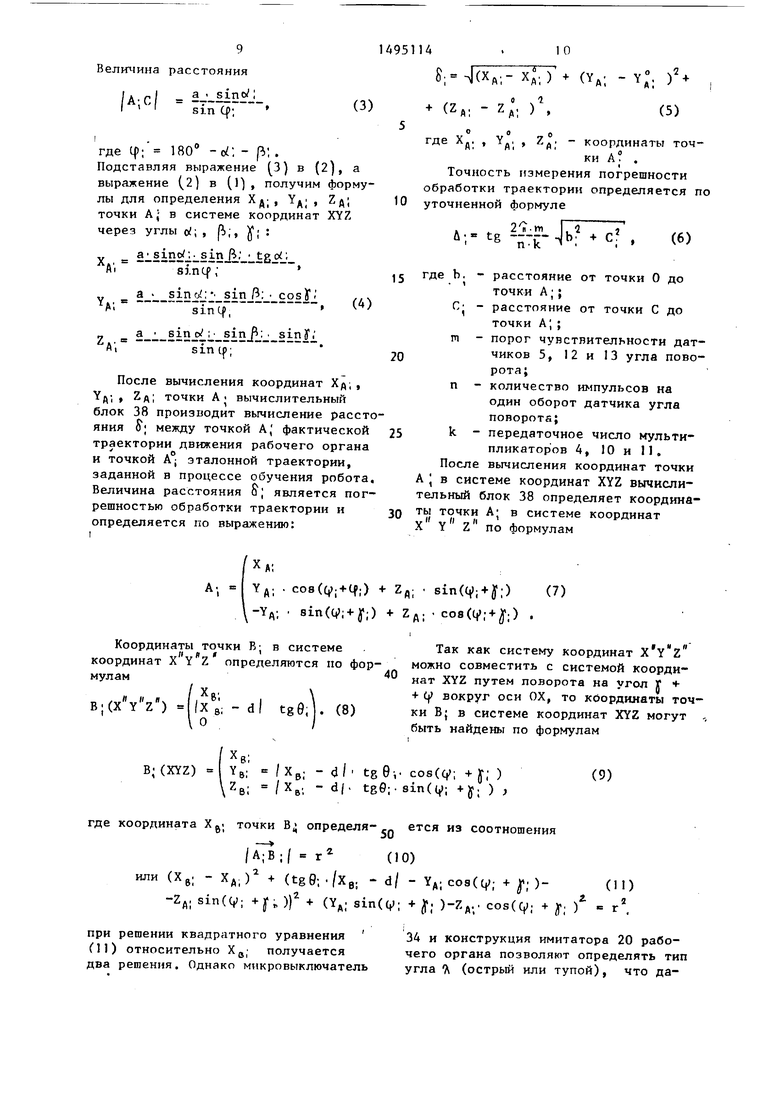
После вычисления координат Хд,, д | Zд; точки А вычислительный блок 38 производит вычисление расстояния между точкой А, фактической траектории движения рабочего органа и точкой эталонной траектории, заданной в процессе обучения робота. Величина расстояния &; является погрешностью обработки траектории и определяется по выражению:
Уд; . C08(; + tf;) + Zfl; sin((Vi + ff;) . sin ((+); +У;) + ZA; - COS((: + J;)
Координаты точки В; в системеТак как систему координат
координат X Y Z определяются по фор- можно совместить с системой коорди- муламнат XYZ путем поворота на угол Г
B;() - dl tge,|. (8) О/
+ if вокруг оси ох, то координаты точ ки В; в системе координат XYZ могут быть найдены по формулам
в I YB; /Хр; - J/ tg0i. cos(if +У; )
ZB; - df. tB0;. 8in(Vi +jf; ) )
где координата точки В определя-, ется из соотношения
50 (10)
/А;В;/ Г
или
(Xg; - Хд;) -ь (tg0;./XB. - d/ - Yд;cos( + If;}- (11) -Zд, sinCV; - |Г« )) - (YA; sin(( + J; )-Zf,.- cos(; + У; ) r .
при решении квадратного уравнения П1) относительно получается два решения. Однако микровыключатель
(ХА;- X, ) (Уд; + (ZA; - z;. )%
- Y;. rД I
(5)
где X.. , Y.. , ZA - координаты точН, He n..
KM A. .
I
Точность измерения погрешности обработки траектории определяется по уточненной формуле
2
U k
+ С
(6)
15
20
25где Ь. - расстояние от точки О до
точки А;; Cj - расстояние от точки С до
точки А;;
п - порог чувствительности датчиков 5, 12 и 13 угла поворота;
п - количество импульсов на один оборот датчика угла поворота;
k - передаточное число мультипликаторов 4, 10 и 11. После вычисления координат точки А J в системе координат XYZ вычислительный блок 38 определяет координа- 3Q ты точки AJ в системе координат X Y Z по формулам
(7)
+ if вокруг оси ох, то координаты точки В; в системе координат XYZ могут -, быть найдены по формулам
(9)
, ет
50 (10)
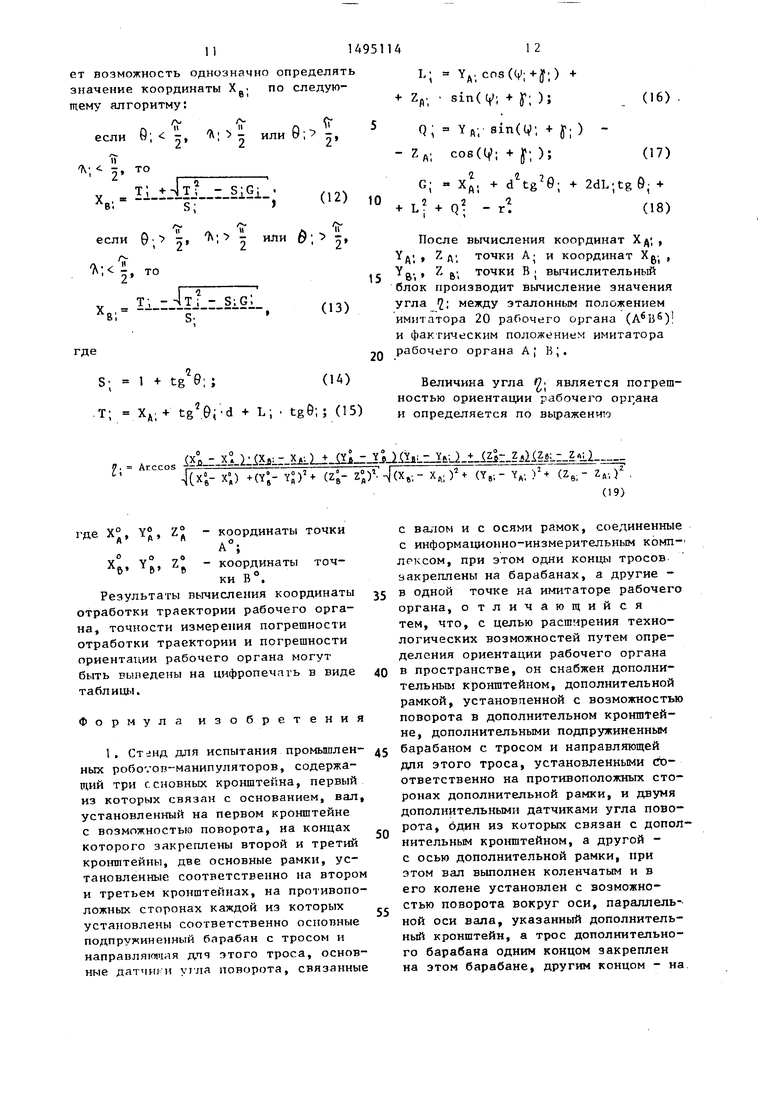
34 и конструкция имитатора 20 рабочего органа позволяют определять тип угла Л (острый или тупой), что да
ет возможность однозначно определять значение координаты по следуюD I
тему алгоритму:
л- л-Of
если б; , или 0; -,
II
, то
XB;
т; + - . -- ,
ir 2 2
л /X X л если 0.- -, Л; - или 0; -,
- ZA; cos(C); + у; );
(17)
G; - Xft, + + 2dL;tge;-. (12) 10 2 2 7
+ Lj + Q - (18)
После вычисления координат Хд; , А . А; точки А; и координат Х ,
л , , V А, -, то
в;
5 7 , - -1т ; - S;G;
(13)
где
S; 1 + tg 0:;
(lA)
Величина угла t являетс ностью ориентации рабочего
л.- eivy AAJnj vjpncn i i-ictUtJ4fc: Д 4J
i . Ai 8 vi d + L ; tgO; ; (15) и определяется по выражению
;
Arccos
ixL -XlllibLr-X L:t-ill-.gJIbLr fca-t-l2lr ZjKZ6:..il
.l(x;-x;) 4Y;-YS) (z;- zp4(Xe;- x,.)% (Y,;- Y,., )+ (z,;- z,)
где X
A
- координаты точки A°;
Xg, Yjj,
Zg - координаты точки в°.
Результаты вычисления координаты отработки траектории рабочего органа, точности измерения погрешности отработки траектории и погрешности ориентации рабочего органа могут быть выиедены на цифройечагь в виде таблицы.
Формула изобретения
1, Стенд для испытания промышлен- ных робогов-манипуляторов, содержащий три ссновных кронштейна, первый из которых связан с основанием, вал, установленный на первом кронштейне с возможностью поворота, на концах которого закреплены второй и третий кронштейны, две основные рамки, установленные соответственно на втором и третьем кронштейнах, на противоположных сторонах каткдой из которых установлены соответственно основные подпружиненный барабан с тросом и направляющая длч этого троса, основные датчики yivia поворота, связанные
ь
1А9511А12
L; Уд,спз() + + Zp; . sin(v; + У; );
Q; Yft- 8in((); + У; ) - ZA; cos(C); + у; );
(17)
После вычисления координат Хд; , А . А; точки А; и координат Х ,
6 В то Ч и R; вычислительный блок производит вычисление значения угла между эталонным положением имитатора 20 рабочего органа () и фактическим положением имитатора
рабочего органа А; В;.
Величина угла t является погрешностью ориентации рабочего орг,ана
eivy AAJnj vjpncn i i-ictUtJ4fc: Д 4J
и определяется по выражению
j О
д
0
5
с валом и с осями рамок, соединенные с информационно-инзмерительным комп- лрксом, при этом одни концы тросов, закреплены на барабанах, а другие - в одной точке на имитаторе рабочего органа, отличающийся тем, что, с целью расширения технологических возможностей путем определения ориентации рабочего органа в пространстве, он снабжен дополнительным кронштейном, дополнительной рамкой, установленной с возможностью поворота в дополнительном кронштейне, дополнительными подпружиненным барабаном с тросом и направляющей для этого троса, установленными соответственно на противоположных сторонах дополнительной рамки, и двумя дополнительными датчиками угла поворота, один из которых связан с дополнительным кронштейном, а другой - с осью дополнительной рамки, при этом вал вьтолнен коленчатым и в его колене установлен с возможностью поворота вокруг оси, параллель- ной оси вала, указанный дополнительный кронштейн, а трос дополнительного барабана одним концом закреплен на этом барабане, другим концом - на.
Фие.З
.. U
Фие.
| Стенд для испытания промышленных роботов-манипуляторов | 1987 |
|
SU1425078A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
