6, По окончании совмещения исполнительного органа 4 с первой точкой, результат перемещения, занесенный в реверсивные счетчики б, по комане с блока 1 управления через вычисительный блок 7.поступает в блок 8 памяти. После этого оператор с попомсяцью блока 2 обучения перемещает Исполнительный орган 4 в следующую точку заданной траектории. Если после записи положения исполнительного органа 4 в первой точке очередной часток траектории представляет собой прямолинейный участок, то запись промежуточных положений исполнительного органа 4, например, при записи программа управления точечной сваркой не производится. Оператор перемещает исполнительный орган 4 сразу в другую конечную точку этого прямолинейного участка и после совмещения исполнительного органа 4 с этой точкой с помощью зацатчика 9 шагов программы задает число промежуточных положений исполнительного органа 4, т.е. число точек сварки на данном прямолинейном участке. После этого по команде с блока 1 управления информация о величине из реверсивных счетчиков 6 поступает в вычислительный блок 7,где в соответствии с заданным числом точек делится по каждой или по одной из координат на данное число. В блок В памяти результат перемещения на Прямолинейном участке поступает в виде последовательности результатов
деления, число которых равно заданному с помощью дополнительного задающего устройстве числу )-о-1-к )ари1 , При воспроизведении програмии ч; каждым результатом допения буд-- :лгдовать технологичес1;лл команда на сварку.
Применение изобретения позвонит сократить время записи программы за счет уменьшения точек позиционирования при записи программы на прямолинейных участках траектории.
Формула изобретения
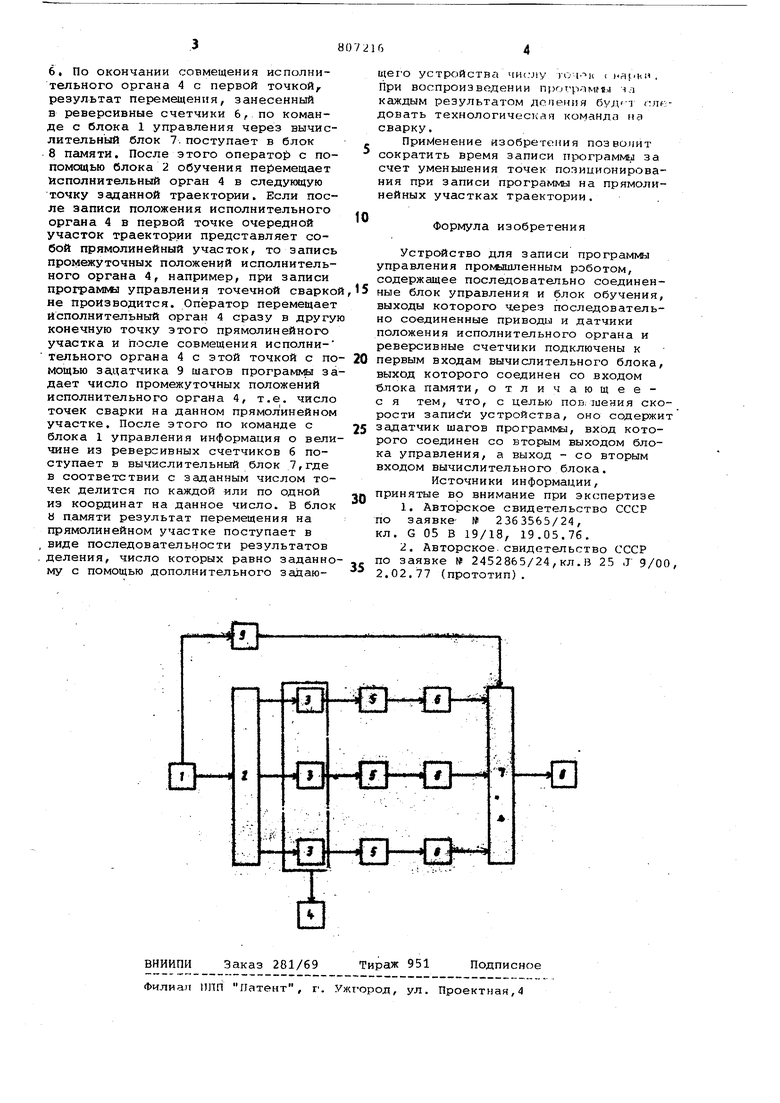
Устройство для записи программы управления промьоштенным роботом, содержащее последовательно соединенные блок управления и блок обучения, выходы которого через последовательно соединенные приводы и датчики положения исполнительного органа и реверсивные счетчики подключены к первым входам вычислительного блока, выход которого соединен со входом блока памяти, отличающеес я тем, что, с целью пов. 1иения скорости записи устройства, оно содержи задатчик шагов программы, вход которого соединен со вторым выходом блока управления, а выход - со вторым входом вычислительного блока.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР по заявке- № 2363565/24,
кл. G 05 В 19/18, 19.05.76.
2,Авторское свидетельство СССР
по заявке № 2452865/24,кл.в 25 J 9/0 2,02.77 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система программного управления для робота-манипулятора | 1978 |
|
SU744456A1 |
| Устройство для записи программы промышленным роботом | 1978 |
|
SU706823A1 |
| Система программного управления для робота-манипулятора | 1977 |
|
SU713682A1 |
| Устройство для записи программы управления промышленным роботом | 1977 |
|
SU726494A1 |
| Устройство для записи программы управления промышленным роботом | 1977 |
|
SU705421A1 |
| Устройство для записи и воспроиз-ВЕдЕНия пРОгРАММ | 1978 |
|
SU807238A1 |
| Устройство для программирования промышленного робота | 1985 |
|
SU1277068A1 |
| Способ управления роботом | 1988 |
|
SU1579771A1 |
| Устройство для записи программы контурного управления промышленным роботом | 1978 |
|
SU930255A1 |
| Устройство для формирования управляющих программ | 1985 |
|
SU1257616A1 |
