Изобретение относится к виброакустической диагностике горных машин и может быть использовано для контроля технического состояния с целью предупреждения аварий.
Целью изобретения является повышение достоверности диагностирования и точности прогнозирования техничес- кого состояния редукторов горных машин путем учета нестационарного режима нагружения и целенаправленного изменения величины измерительных интервалов.
На чертеже представлена структурная схема устройства диагностирования редукторов горных машин.
В состав устройства входят вибро- датчик 1, первый корректирующий уси- литель.2, первый аналого-цифровой преобразователь (АЦП) 3, первый входной регистр Ц, первый 5, второй б и третий 7 регистры запоминания вибрации, первый 8, -второй 9 и третий 10 блоки вычитания, первый блок 11 сравнения, первый сигнализатор 12 аварийной работы, блок 13 учета времени работы, блок 14 измерительных интервалов и блок 15 управления. При этом вибродатчик 1, усилитель 2, АЦП 3 и регистры 4-7 соединены последовательно, вход блока 13 подключен к второму выходу усилителя 2, а выход через блок 14 - к входу блока 15, первый-четвертый выходы которого связаны с вторыми входами соответственно регистров 4-7, входы блоков 8- и 9 соединены с выходами соответственно регистров 5 и 6, б и 7, а выходы - с входами блока ,10, выход которого подключен к входу блока 11. Дополнительно введены датчик 16 нагрузки, второй корректирующий усилитель 17, второй АЦП 18, второй входной регистр 19 первый 20, второ 21 и третий 22 регистры запоминания нагрузки, четвертый 23 и пятый 24 блоки вычитания, второй 25, третий 26, четвертый 27 и пятый 28 блоки сравнения, первый 29, второй 30, третий 31 и четвертый 32 логические элементы И, блок 33 коррекции измерительных интервалов и второй сигнализатор 34 аварийной работы. При этом датчик 16, усилитель 17t АЦП 18 и регистры соединены последовательно, вторые входы регистров 19 22 подключены соответственно к первому-четвертому выходам блока 15, входы блоков 25 и 26 связаны с вы ходами соответственно блоков 8 и 9, а их выходы - с входами элемента .29, входы блоков 23 и 24 соединены с выходами соответственно регистров 20 и 21, 21 и 22, а их выходы - с входами соответственно блоков 27 и 28, выходы которых подключены к входам элемента 30, выход которого связан с вторым входом элемента 31, первый вход которого - с выходом элемента 29, а выход - с входом блока 33, выход соединен с вторым входом блока 14, а также с входом сигнализатора 34 и с первым входом элемента 32, второй вход которого подключен к выходу блока 11, а выход - к сигнализатору 12.
Корректирующие усилители Ли 17 служат для согласования выходных параметров вибродатчика 1 и да тчика 16 нагрузки с входными параметрами последующих блоков, устранения амплитудных искажений в выходных сигна- , лах датчиков и детектирования. Устранение амплитудных искажений (завалы на низких и высоких частотах) осуществляется путем включения реактивных элементов в цепь отрицательной обратной связи усилителя. Кроме того, в цепь обратной связи усилителя 2 включены нелинейные элементы, за счет чего формируется заданная амплитудная характеристика (например, логарифмическая) для перекрытия динамического диапазона входного сигнала.
АЦП 3 и 18 преобразуют входные сигналы в двоичный код и могут быть выполнены любым из известных способов. Время преобразования АЦП должно быть значительно ниже постоянной времени детекторной цепи.
Регистры Ц-J и 19-22 могут быть выполнены, например, на D-триггерах. Блоки 8 - 10, 23 и 2 вычитания могут быть выполнены любым из известных способов, например путем суммирования прямого кода одного числа с инверсным кодом второго. Возможная погрешность в единицу счета младшего разряда не имеет значения для точности метода. Блоки 11 , 25 - 28 сравнения, а также логические элементы И 29 - 32 особенностей не имеют.
Сигнализаторы 12 и аварийной работы представляют собой последовательное соединение RS-триггера и светодиодного индикатора.
Блок 13 учета времени работы выполнен на усилителе-ограничителе, выпрямителе, емкостном наполнителе и пороговом элементе, последовательно соединенными друг с другом. При неработающей горной машине входной выходной сигналы блока 13 равны нулю. При включении горной машины напряжение, накопленное в емкостном накопителе, достигает уровня срабаывания порогового элемента и на выходе блока 13 появляется управляюий сигнал. Емкостной накопитель редотвращает ложные срабатывания орогового элемента от импульсов,
возникающих, например, при ремонте горной машины, когда возможны удары деталей, нб связанные с работой ре- дуктора.
Блок 11 измерительных интервалов вырабатывает импульсы, период следования которых в начале работы горной машины (до корректировки) равен Ю-20 ч, и состоит из задающего
генератора, перестраиваемых делителей частоты и ключа, включающего задающий генератор при появлении сигнала на выходе блока 13. 5 Блок 15 управления может состоять, например, из сдвигающего регистра, выходы которого управляют пересылкой информации из входных в запоминающие регистры. 0 Блок 23 коррекции измерительных интервалов служит для сокращения периода следования управляющих импульсов, вырабатываемых блоком 1, при появлении в зубчатом зацеплении 5 дефекта и состоит из двоичного счетчика , на выходной шине которого формируется код, соответствующий числу появлений логической 1м на выходе логического элемента 31.
Таким образом, все блоки предлагаемого устройства могут быть реализованы на элементах современной электронной техники или в виде специального программного обеспечения микроЭВМ.
Устройство работает следующим образом.
Электрические сигналы с датчика 16 нагрузки поступают в корректирующие усилители 2 и 17, где они усиливаются, корректируются и детектируются. Обработанные указанным образом аналоговые сигналы преобразуются в цифровую форму в АЦП 3 и 18. Далее цифровые сигналы по команде блока 15 управления через равные промежутки времени, генерируемые блоком И измерительных интервалов, заносятся во входные регистры А и 19. Содержание этих регистров обновляется только после прихода разрешающего импульса с блока измерительных интервалов. После обновления информации в блоках и 19 блок 15 управления производит перезапись информации 5 входных регистров k и 19 в первые пе-| редаточные (запоминающие) регистры 5 и 20, где производится хранение этой информации до прихода следующего
С
f
G
5
0
управляющего импульса. Затем происходит запись новой информации во входные регистры Ц и 19, перезапись из регистров 4 и 19 соответственно в регистры 5 и 20, откуда соответст- венно в регистры б и 21 и так далее, т.е. при приходе каждого управляющего импульса происходит запись информации в регистры 4 и 19 и перезапись по цепочке 4- 5, ,, , , 21- 22.
После появления первой информации в регистрах 7 и 22 дается разрешение на работу последующих блоков устрой- ства. Сигналы Us и и« подаются на входы блока 8 вычитания, на выходе которого образуется сигнал, равный
U,
U s- IT,
Аналогично сигналы и и U7 по- даются на входы блока 9 вычитания, на выходе которого имеем Ug U$ - - U7. Далее сигналы Ug и Ug поступают на входы блока 10 вычитания, выходной сигнал которого U
10
и«
- Ug, пропорциональный ускорению нарастания вибросигнала, подается на вход блока 11 сравнения, представляющего собой компаратор нулевого уровня. При этом в качестве нулевог уровня используется малая величина, учитывающая точность измерения и преобразования вибросигнала. Если llf,, больше указанного нулевого уровня, то сигнал Un принимает значение логической 1. Одновременно сигналы U 4 и -Ug подаются соответственно на входы блоков 25 и 26 сравнения, работающих по следующим алгоритмам:
u, ;
,
.
(1)
(2)
В качестве нулевого уровня принята такая же величина, как и в блоке 11. Если на трех измерительных интервалах времени наблюдается рост ампли- туды вибросигнала, то V г$ U -г, 1 и на выходе логического элемента 29 сигнал принимает значение логической 1. Одновременно сигналы Uio и U подаются на входы блока 23 вычита- ния, на выходе которого образуется сигнал U 13 и it U if- Аналогично сигналы U т.) и U а7 подаются +ta входы блока 2k вычитания, на выходе которого имеется и 14 U 1( - игг. Да-- лее сигналы и U24 поступают на входы соответственно блоков 27 и 28 сравнения, работающих по следующим алгоритмам:
-( U
to, и.
-(1 и
1 о, и
гг
U 24
Z4
Uo ио
U0
и„
(3)
W
c
0
5
Q
40
45
гп 55
В качестве порогового уровня Ue используется зона нечувствительности аппаратуры управления режимами работы горной машины, равном обычно + ()% от номинальной нагрузки. Если на трех измерительных интервалах времени наблюдается постоянство или снижение уровня нагрузки на валу контролируемого редуктора, то U27 U 2g 1, на выходе логического , элемента 30 сигнал принимает значение логической 1.
Рост амплитуды вибросигнала при стационарной или уменьшающейся на|- рузке свидетельствует о наличии дефектов в зубчатых зацеплениях. Следовательно, если на одних и те же трех измерительных интервалах U U 30 1, то U з, 1, триггер в сигнализаторе 3 переводится в единичное состояние и загорается соответствующий светодиодный индикатор, информирующий обслуживающий персонал о наличии дефекта в контролируемом редукторе. Причем сигнализатор 3 остается включенным на все последующее время работы горной машины.
Одновременно срабатывает блок 33 и уменьшает период следования разрешающих импульсов с блока 1 на одну ступень путем соответствующей перестройки делителей частоты. Если в процессе последующей работы горной машины возникают указанные сочетания сигналов U2g и , то блок 33 уменьшает период следования разрешающих импульсов с блока 1 еще на одну ступень путем соответствующей перестройки делителей частоты. Если в процессе последующей работы горной машины возникают указанные сочетания сигналов U .jg и U30, то блок 33 уменьшает период следования разрешающих импульсов еще на одну ступень и т.д., вплоть до некоторого минимального периода следования, определяемого из
условий наиболее интенсивного износа зубчатых зацеплений и равного 1-2 ч.
Очевидно, что рост амплитуды вибросигнала с ускорением, превышающим установленный нулевой уровень, при стационарном или уменьшающейся нагрузке свидетельствует о начале периода интенсивного износа зубчатых зацеплений. Следовательно, если на одних и тех же измерительных интервалах Uw U3o U 9, и„ 1, то U. 1, триггер сигнализатора 12 переводится в единичное состояние и загорается соответствующий светодиодный индикатор, информирующий обслуживающий персонал о начале периода интенсивного износа контролируемого редуктора. Причем сигнализатор 12 остается включенным на все последующее время работы горной машины.
Таким образом, устройство определяет наличие дефектов, учитывая характер изменения нагрузки, и корректирует периодичность контроля, что способствует повышению достоверности диагностирования и точности прогнозирования технического состояния редукторов горных машин.
Формула изобретения
Устройство диагностирования редукторов горных машин, содержащее блок сигнализатор аварийной работы и вибродатчик, подключенный к входу первого корректирующего усилителя, первый выход которого соединен через первый аналого-цифровой преобразователь с первым входом первого входного регистра, а второй выход первого корректирующего усилителя подключен через блок учета времени работы к блоку измерительных интервалов, первый выход-которого соединен с входом блока управления, первый выход которого подключен к второму входу первого входного регистра.соединен с вторым входом первого регистра запоминания вибрации, выход которого подключен к первому входу первого блока вычитания и к второму входу второго регистра запоминания вибрации, выход которого подключен к второму входу первого и первому входу второго блока вычитания, а также к второму входу третьего регистра запоминания вибрации, выход которого соединен с вторым входом
5
0
5
0
5
0
5
второго блока вычитания, выход кото- рого подключен к первому входу третьего блока вычитания, второй вход которого соединен с выходом первого блока вычитания, а выход - с входом первого блока сравнения, о т л и - ча ющееся тем, что, с целью повышения достоверности диагностирования и точности прогнозирования технического состояния объекта за счет учета нестационарного режима его нагружения и целенаправленного изменения величины измерительных интервалов, устройство снабжено датчиком нагрузки, вторым корректирующим усилителем, вторым аналого-цифровым преобразователем, вторым входным регистром, регистрами запоминания нагрузки, вторым, третьим, четвертым и пятым блоками сравнения, четвертым и пятым блоками вычитания, вторым блоком сигнализатором аварийной работы, четырьмя логическими элементами И и блоком коррекции измерительных интервалов, причем датчик нагрузки подключен через последовательно соединенные второй корректирующий усилитель и второй аналого-цифровой преобразователь к первому входу второго входного регистра, выход которого соединен с первым входом первого регистра запоминания нагрузки, выход которого соединен с первым входом четвертого блока вычитания и с первым входом второго регистра запоминания нагрузки, выход которого соединен с первыми входами третьего регистра запоминания нагрузки и пятого блока вычитания а также с вторым входом, четвертого блока вычитания, выход которого связан через четвертый блок сравнения с первым входом второго логического элемента И, выход третьего регистра запоминания нагрузки подключен к второму входу пятого блока вычитания, выход которого через пятый блок сравнения соединен с вторым входом второго логического элемента И, выход которого подключен к первому входу третьего элемента И, выход которого соединен с входом второго блока сигнализатора аварийной работы, с первым входом четвертого элемента И и через блок коррекции измерительных интервалов - с вторым входом блока измерительных интервалов, выход первого блока сравнения подключен к второму входу четвертого логического
II157999812
элемента И, выход которого подключенс вторым входом третьего элемента И,
к первому блоку сигнализации аварий-при этом первый, второй, трений и
ной рабрты, выходы первого и второгочетвертый выходы блока управления
блоков вычитания соединены с входамиподключены к вторым входам соответстсоответственно второго и третьеговенно второго входного регистра и
блоков сравнения, выходы которых под-первого, второго, третьего регистров
ключены к входам первого логическогозапоминания нагрузки, элемента И, выход которого связан
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство вибродиагностики горных машин | 1985 |
|
SU1270324A1 |
| Способ вибродиагностики редукторов горных машин | 1987 |
|
SU1513141A1 |
| Цифровой частотомер | 2019 |
|
RU2730047C1 |
| Устройство двухступенчатого аналого-цифрового преобразования | 1985 |
|
SU1266003A1 |
| ИЗМЕРИТЕЛЬ ДИСБАЛАНСА | 1992 |
|
RU2030724C1 |
| Устройство для диагностирования цилиндропоршневой группы двигателя внутреннего сгорания | 1990 |
|
SU1777021A1 |
| УСТРОЙСТВО ДИАГНОСТИКИ ТЯГОВОЙ СЕТИ | 2013 |
|
RU2545533C2 |
| Цифровое устройство для измерения порядка интерференции | 1987 |
|
SU1420364A1 |
| Устройство допускового контроля параметров | 1991 |
|
SU1800380A1 |
| Фотоэлектрический анализатор количества и размеров частиц | 1987 |
|
SU1518727A1 |
Изобретение относится к вибро-акустической диагностике горных машин. Сущность: повышение достоверности диагностирования и точности прогнозирования технического состояния объекта за счет учета нестационарного режима его наружения и целенаправленного изменения величины измерительных интервалов. 1 ил.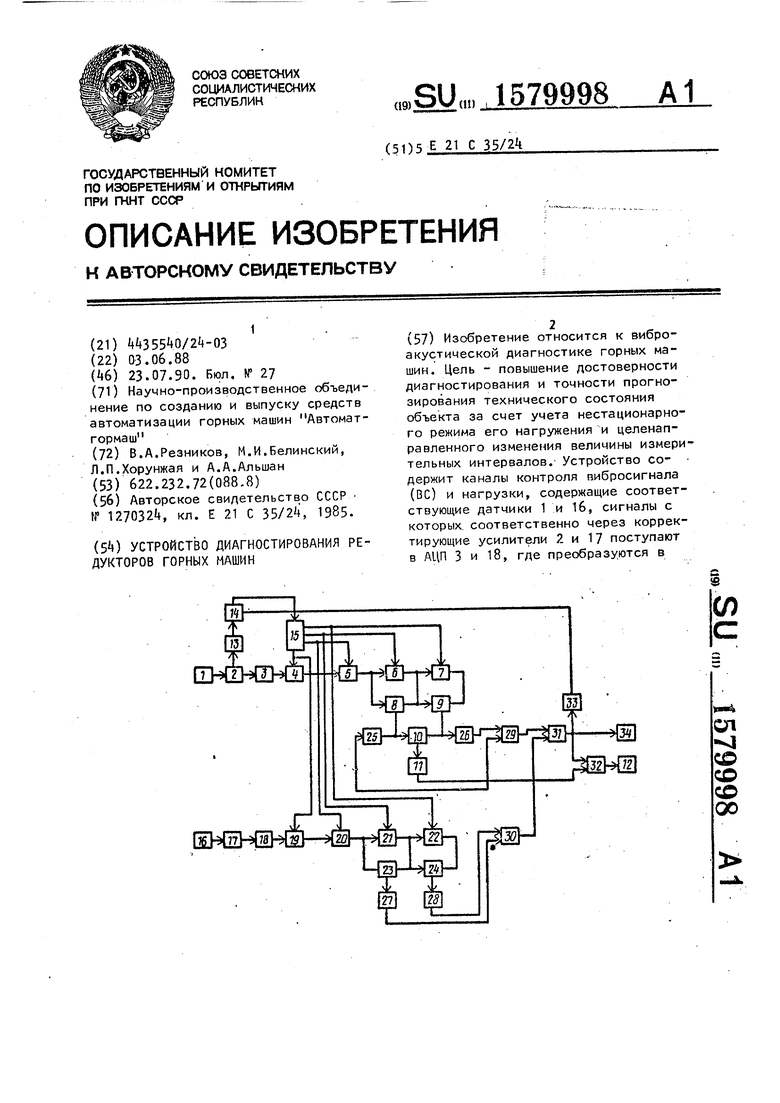
| Быстрорежущая сталь | 1959 |
|
SU127032A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| ( УСТРОЙСТВО ДИАГНОСТИРОВАНИЯ РЕДУКТОРОВ ГОРНЫХ МАШИН | |||
