входных сигналов, которые поступают на входы элементов ИЛИ 35 и 36, на выходе которых формируются импульсы, соответствующие шагу точного отсчета.
Сигналы 1 с выходов элементов j, ИЛИ 35 и 36 поступают на входы элементов 37 и 38 задержки, а по истечении заданного времени - на С-входы разрешения записи регистров 25-28 и положительным фронтом осуществляют запись п кодов с выходов преобразователей 18, 19 и 22, 23 через информационные входы в регистры 25-28. Время ta выдер.ж- ки элементов 37 и 38 устанавливается экспериментально в соответствии с со- 25 отношением
Т мин
t.
a m -т..
где Т
мин
30
короткие импульсы по переднему фронту . элементов 29 и 31 сравнения поступает
на суммирующие +1 входы счетчиков 39 и 40, увеличивая его содержимое на единицу, и на выход 1 колодки 41. Одновременно на выходах преобразова- телей 18 и 22 устанавливаются коды, на единицу большие текущие значения, а на выходах преобразователей 19 и 23 - на единицу меньшие текущего значения, которые через время tg выдержки заносятся в регистры 25-28, изменяя их содержимое соответственно на единицу большее и меньшее, относительно текущего значения и подготавливая -регистры к следующей операции сравнения.
При повороте вала 12 на следующие шаги точного отсчета в том же направлении работа элементов схемы происходит в аналогичном порядке, и счетчики 39 и 40 каждый раз увеличивают содержимое на единицу, фиксируя таким образом коды текущего значения углового положения вала 12.
При повороте вала 12 на один шаг точного отсчета в обратном направлении работа узлов 15 и 16 различения направления происходит следующим образом.
После обратного поворота вала на один шаг точного отсчета на выходах преобразователей 17 и 21 появляются коды, на единицу меньшие предыдущего значения. Тогда сигналы 1 установятся на выходах тех элементов сравнения, на вторых входах которых в этот момент действуют коды, на единицу меньшие предыдущего значения, т.е. элементов 30 и 32. Сигналы 1 поступают на вычитающие -1 входы счетчиков 39 и 40, уменьшая их содержимое на единицу после обратного поворота вала на каждьй шаг точного отсчета, и на выход 2 колодки 41.
FI,
т.
t. минимальное время одного оборота диска (при минимально допустимой скорости вращения вала);
-число шагов грубого отсчета в пределах одного оборота диска;35
-число шагов точного отсчета на одном шаге грубого отсчета;
время выполнения операции сравнения кодов. 40
Коды с выходов регистров 25-28 поступают на вторые входы элементов 29- 32 сравнения, на первые входы которых в этот момент поступают коды с выходов преобразователей 17 и 21. 45 Вследствие несовпадения кодов на входах элементов 29-32 сравнения на их выходах установлены сигналы О.
В рассматриваемой системе вал 12 от начального положения поворачива- 50 ется в каком-то одном направлении (как, например, в следящих системах позиционирования промышленных роботов). При этом при повороте ненагруженного вала 3 2 на один шаг точ- 55 ного отсчета появится код в соответствии с поз.2 таблицы, в результате чего на выходах преобразователей 17
Таким образом, в зависимости от направления вращения вала 12 счетчики 39 и 40 будут прибавлять или вычитать единицу при повороте на каждый шаг точ ного отсчета. При повороте вала на
Таким образом, в зависимости от направления вращения вала 12 счетчики 39 и 40 будут прибавлять или вычитать единицу при повороте на каждый шаг точного отсчета. При повороте вала на
915
один изг грубого о гсчагз на выходах преобразователей 17-24 ЙНОБЬ устанавливаются коды в соответствии с позицией 1 таблицы и счет ш-шульсов счетчиками 39 и АО производится в том же порядке.
Б рассматриваемой системе блок 2 измеряет угловое положение конца вала (диск J1) , присоединенного к двига- телю, а блок 1 - угловое положение нагруженного конца вала J 2 (диск J 0). Код с выхода счетчика 39, фиксирующего угловое положение диска 10, с выхода 4 колодки 41 поступает на вход 7 колодки 67 и далее - на первый вход элемента 76 вычитания, а также на вход 4 колодки 80, связанный с входом элемента 81 индикации текущего значения углового положения о вала 12. Одновременно код с выхода счетчика 40, фиксирующего угловое положение диска 11, с выхода 5 колодки 41 поступает на вход 8 колодки 67 и далее - на второй вход элемента 76 вычитания. При ненагруженном вале значения кодов, фиксируемых счетчиками 39 и 40, одинаковы и на выходе элемента 76 вычитания формируется код нулевого момента.
При нагруженин вала некоторым крутящим моментом М происходит дополнительный поворот одного диска 10 относительно другого диска 11. Величина этого поворота определяется углом закручивания, пропорционального крутящему моменту на оси вала. Код разности углового положения дисков 10 и 11, формируемый на выходе элемента 76 вычитания, выраженный в единицах момента вращения, поступает через выход 1 колодки 79 на вход 1 колодки 80, связанный ,с входом элемента 84 индикации момента вращения М.
Блок 3 вычисления угловой скорости работает следующим образом.
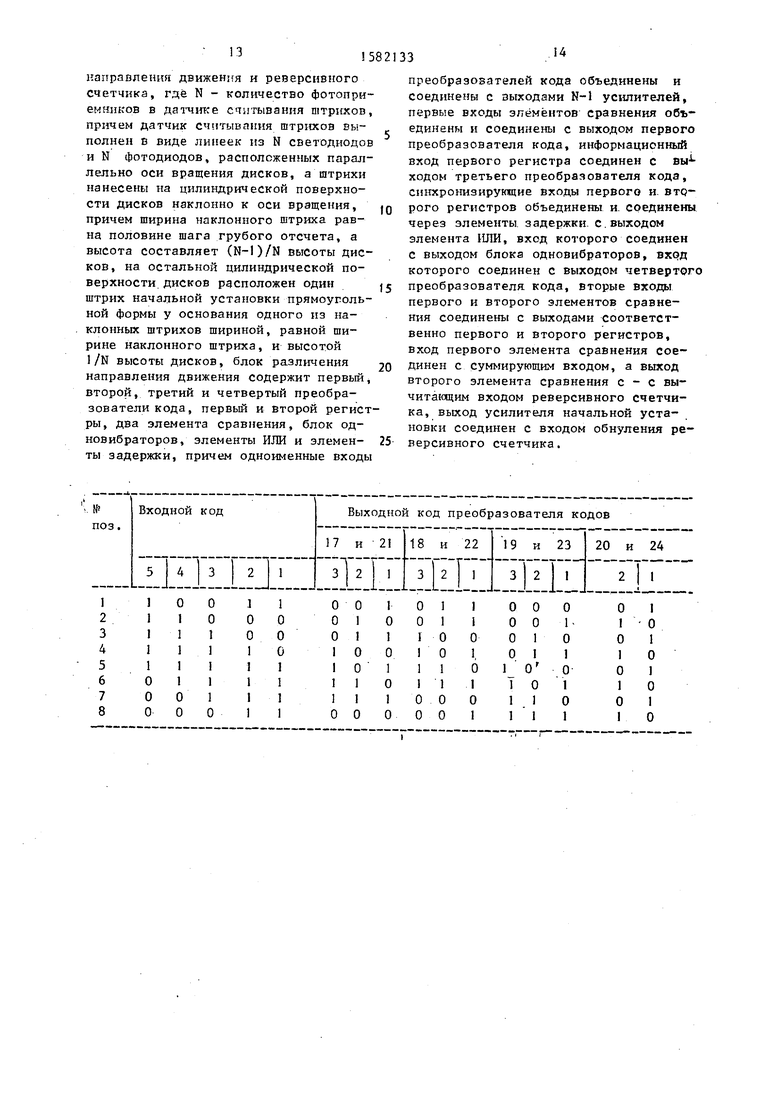
Импульсы с выхода элемента ИЛИ 35 блока 1 поступают на выход 3 колодки 41 и через вход 3 колодки 42 - на Т-вход Т-триггера 44 и на вторые входы элементов И 46 и 48. На прямом и инверсном выходах Т-триггера 44 формируются импульсы, длительность которых равна периоду следования входных импульсов, причем на прямом выходе триггера формируется импульс длительностью Т(, на инверсном - Tj+1, где i - порядковый номер входного импульса в пределах шага грубого отсчета.
33JO
Импульс с прямого выхода Т-трнггера 44 поступает на второй вход элемента И 45 и разрешаетепрохождение импульсов с выхода генератора 43 через элемент и 49 на С-вход счетчика 55, который осуществляет их подсчет.
Установившийся на выходе счетчика 55 по окончании импульса Tj код, пропорциональный длительности Т;, записывается в регистр 59 по сигналу с выхода элемента И 46. Сброс счетчика 55 осуществляется сигналом с выхода элемента И. 46 через элемент 53 задержки.
Импульс с инверсного выхода Т-триггера 44 поступает на первый вход элемента И 47 и разрешает прохождение импульсов с выхода генератора 43 на С-вход счетчика 56 через элемент И 50 Установившийся на выходе счетчика 56 по окончании импульса Tj+t код, пропорциональный длительности Т . , записывается в регистр 60 по сигналу с выхода элемента И 48. Сброс счетчика
55осуществляется сигналом с выхода элемента И 48 через элемент 54 задержки. Элемент И-НЕ 57 и 58 используются Для запрещения счета счетчиков 55 и
56при остановке диска 10, в этом случае счетчики достигают максимального числа и сигналы, поступившие на вторые входы элементов И 49 и 50 с выходов элементов И-НЕ 57 и 58 соответственно, запрещают прохождение импульсов с выхода генератора 43 на С-входы счетчиков 55 и 56 и одновременно поступают на первые входы элементов И 51 и 52, на вторые входы которых поступают коды с выходов эле- teHTOB 62 и 63 деления.
Коды с выходов регистров 59 и 60 поступают на выходы 1 и 2 колодки 66 и на вторые входы элементов 62 к 63 . деления, на первые входы которых поступает код постоянной величины , соответствующий величине угла шага точного отсчета. Для управления работой элементов 62 и 63 деления на их четвертые входы поступают сигналы синхронизации с выходов элементов 53 и 54 задержки. На третьи входы эле- „ ментов 62 и 63 поступает сигнал с выхода RS-триггера 64, формирующего сигная знака величины скорости по сигналам с выходов элементов 29 и 30 сравнения, поступающим через выходы 1 и 2 колодки 41 и входы 1 и 2 колодки 42 на S- и R-входы RS-триг- гера 64 соответственно.
На выходе элемента 62 деления формируется код, численно равный величине U),/Ttt , а на выходе элемента 63 деления - код, численно равный величине wiif1 «rfe /Т,«+), где ш - угловая скорость вращения диска 10. Коды с выходов элементов 62 и 63 деления че- JQ рез элементы И 51 и 52 поступают на выходы 3 и 4 колодки 66 и на входы элемента ИЛИ 65, с выхода которого на выход 7 колодки 66 поступает код, численно равный текущему значению уг- ловой скорости вращения ос диска 10. При остановке диска 10 сигналы с выходов элементов Й-НЕ 57 и 58, поступая на первые входы элементов И 51 и 52, запрещают прохождение кодов на 20 выходы 4 и 5 колодки 66 и на входы элемента ИЛИ 65, в результате чего на выходах 3, 4 и 7 устанавливаются коды, численно равные w 0.
Блок 4 вычисления, углового ускоре- 25 ния и момента вращения работает следующим образом.
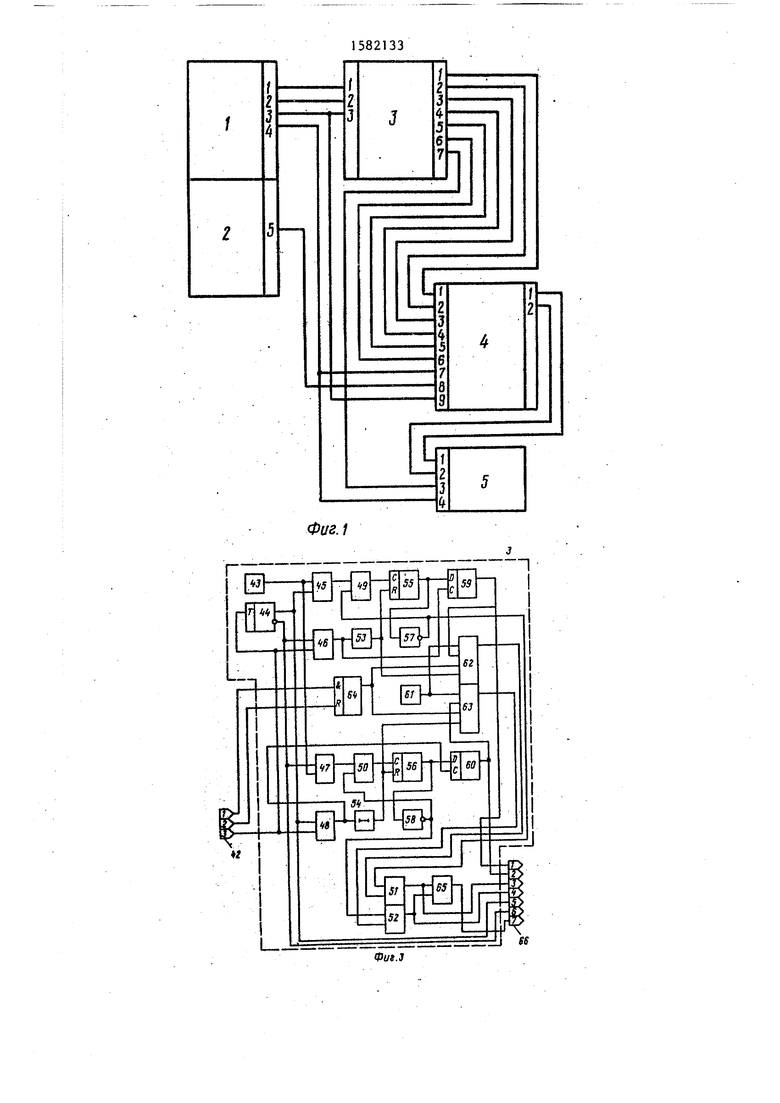
Коды с выходов 3 и 4 колодки 66 через входы 3 и 4 колодки 67 поступа- пают на информационные Х-входы демулъ-30 типлексоров 68 и 69, на адресные А- входы управления которых с выходов 5 и 6 колодки 66 через входы 5 и 6 колодки 67 поступают импульсы управления с прямого и инверсного выходов « Т-триггера 44. С выходов Y( и Y2 де- мультиплексоров 68 и. 69 коды, численно равные to. и W,%., поступают на входы элементов ИЛИ 70 и 71, причем на выходе элемента ИЛИ 70 формирует- до ся код, численно равный cJ;t(« а на входе элемента 71 - W-в каждый момент времени.
Коды с выходов элементов ИЛИ 70 и 71 поступают соответственно на пер- 45 вый и второй входы элемента 75 вычитания , на выходе которого Формируется код, численно равный разности iW .,- CU ;, поступающий на первый вход элемента 77 деления. На вто- CQ рой вход элемента.77 деления поступает код, численно равный Т .+t с выхода элемента ИЛИ 72, на входы которого с выходов 1 и 2 колодки 66 через входы 1 и 2 колодки 67 и эле- менты И 73 и 74 поступают коды, чисг пенно равные Т- и Tj+t . Управление элементов 77 деления осуществляется импульсами, поступающими на его третий вход с выхода 3 колодки 41 через вход 9 колодки 67 и элемент 78 задержки. На выходе элемента 77 деления формируется код, численно равный величине углового ускорения Ј йш /Т;4), который поступает на выход 2 колодки 79.
Вычисление момента вращения осуществляется элементом 76 вычитания, на первый вход которого с выхода 4 колодки 41 через вход 7 колодки 67 поступает код углового положения диска 10, а на второй вход с выхода 5 колодки 41 через вход 8 колодки 67 - код углового положения диска 11. На выходе элементе 76 вычитания формируется код, пропорциональный моменту вращения вала 12, поступающий на выход 1 колодки 79.
Формула изобретения
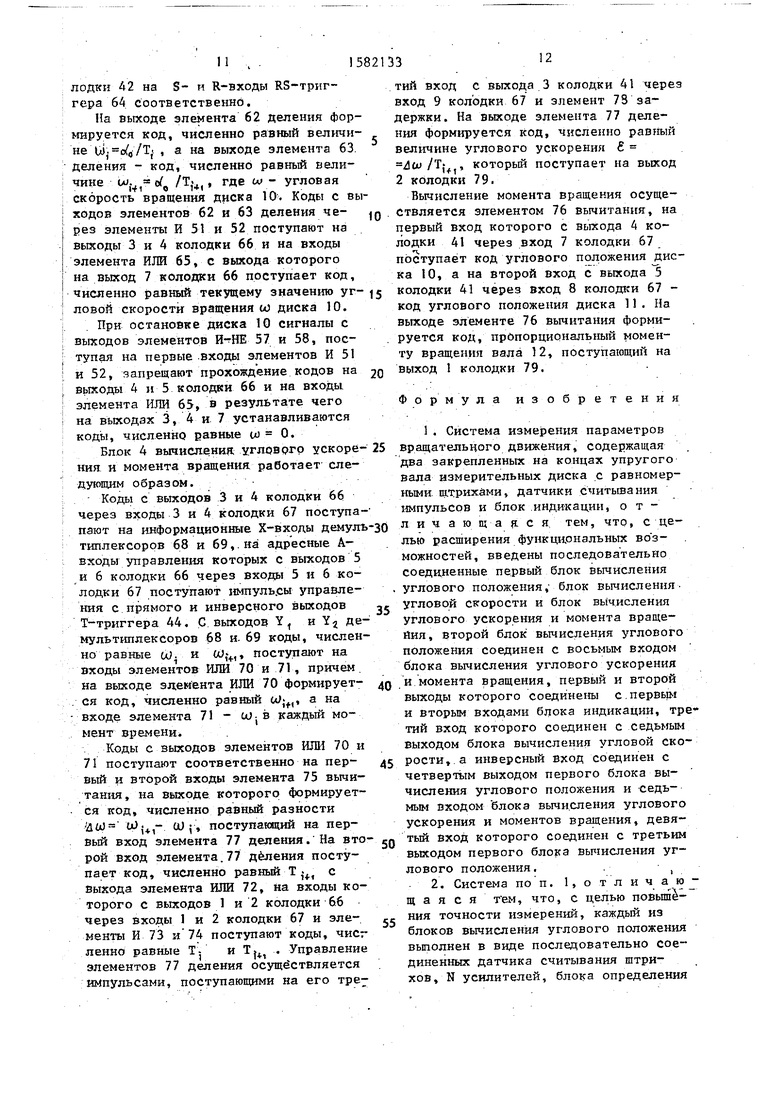
1.Система измерения параметров вращательного движения, содержащая два закрепленных на концах упругого вала измерительных диска с равномерными штрихами, датчики считывания импульсов и блок индикации, отличающаяся тем, что, с целью расширения функциональных во з- можностей, введены последовательно соединенные первый блок вычисления углового положения, блок вычисления угловой скорости и блок вычисления углового ускорения и момента вращения, второй блок вычисления углового положения соединен с восьмым входом блока вычисления углового ускорения и момента вращения, первый и второй выходы которого соединены с первым
и вторым входами блока индикации, тр тий вход которого соединен с седьмым выходом блока вычисления угловой скорости, а инверсный вход соединен с четвертым выходом первого блока вычисления углового положения и седьмым входом блока вычисления углового ускорения и моментов вращения, девятый вход которого соединен с третьим выходом первого блока вычисления углового положения.,
2.Система по п. 1,отличаю щ а я с я т ем, что, с целью повышения точности измерений, каждый из блоков вычисления углового положения выполнен в виде последовательно соединенных датчика считывания штрихов, N усилителей, блока определения
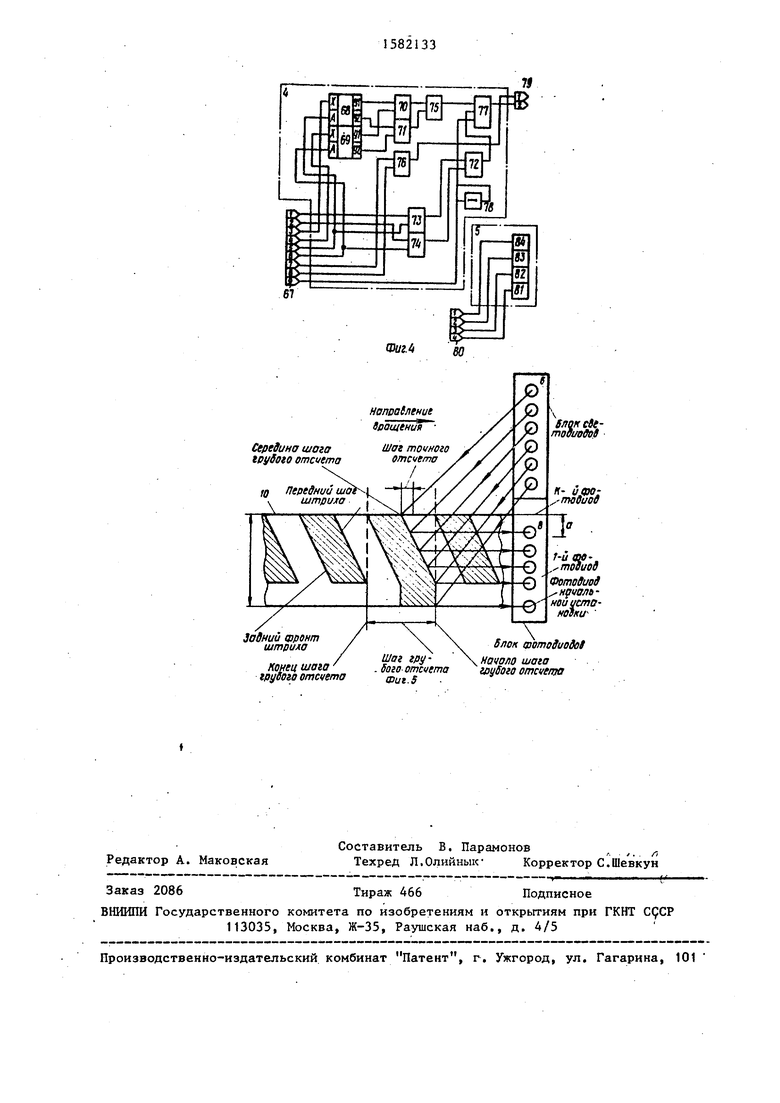
направления движения и реверсивного счетчика, где N - количество фотопри- ечяиков в датчике считывания штрихов, причем датчик считывания штрихов выполнен в виде линеек из N светодиодов и N фотодиодов, расположенных параллельно оси вращения дисков, а штрихи нанесены на цилиндрической поверхности дисков наклонно к оси вращения, причем ширина наклонного штриха равна половине шага грубого отсчета, а высота составляет (N-1)/N высоты дисков, на остальной цилиндрической поверхности дисков расположен один штрих начальной установки прямоугольной формы у основания одного из наклонных штрихов шириной, равной ширине наклонного штриха, и высотой 1/N высоты дисков, блок различения направления движения содержит первый, второй, третий и четвертый преобразователи кода, первый и второй регистры, два элемента сравнения, блок од- новибраторов, элементы ИЛИ и элемен- ты задержки, причем одноименные входы
o
5
5
0
преобразователей кода объединены и соединены с выходами N-1 усилителей, первые входы элементов сравнения объединены и соединены с выходом первого преобразователя кода, информационный вход первого регистра соединен с вы ходом третьего преобразователя кода, синхронизируетцие входы первого и второго регистров объединены и соединены через элементы задержки с выходом элемента ИЛИ, вход которого соединен с выходом блока одновибраторов, вход которого соединен с выходом четвертого преобразователя кода, вторые входы первого и второго элементов сравнения соединены с выходами соответственно первого и второго регистров, вход первого элемента сравнения соединен с суммирующим входом, а выход второго элемента сравнения с - с вычитающим входом реверсивного счетчика, выход усилителя начальной установки соединен с входом обнуления реверсивного счетчика.
67
4
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 1992 |
|
RU2085034C1 |
| Электронный теодолит | 1988 |
|
SU1610272A1 |
| Преобразователь угла поворота вала в код | 1990 |
|
SU1698990A1 |
| Устройство для контроля преобразователей угла поворота вала в код | 1982 |
|
SU1104573A1 |
| Преобразователь перемещения в код | 1983 |
|
SU1150765A1 |
| Устройство для измерения угла поворота вала | 1990 |
|
SU1772629A1 |
| Фотоэлектрический преобразовательуглА пОВОРОТА ВАлА B чиСлО | 1979 |
|
SU822118A1 |
| Преобразователь перемещений в код | 1978 |
|
SU763939A1 |
| Преобразователь угол-код | 1983 |
|
SU1116447A1 |
| Устройство для учета перемещаемых изделий | 1985 |
|
SU1324045A1 |
Изобретение относится к измерению углового положения, скорости, ускорения и момента вращения вала. Целью изобретения является повышение точности измерений и расширение функциональных возможностей. Блоки 1 и 2 вычисления углового положения формируют на выходах двоичные коды, соответствующие угловому положению дисков 10 и 11 в каждый момент времени, а также направления вращения диска 10. Блок вычисления угловой скорости служит для формирования на выходе двоичного кода значения мгновенной скорости. Блок индикации служит для индикации углового положения угловой скорости и углового ускорения диска 10, а также момента вращения вала 12. 1 з.п. ф-лы, 5 ил., 1 табл.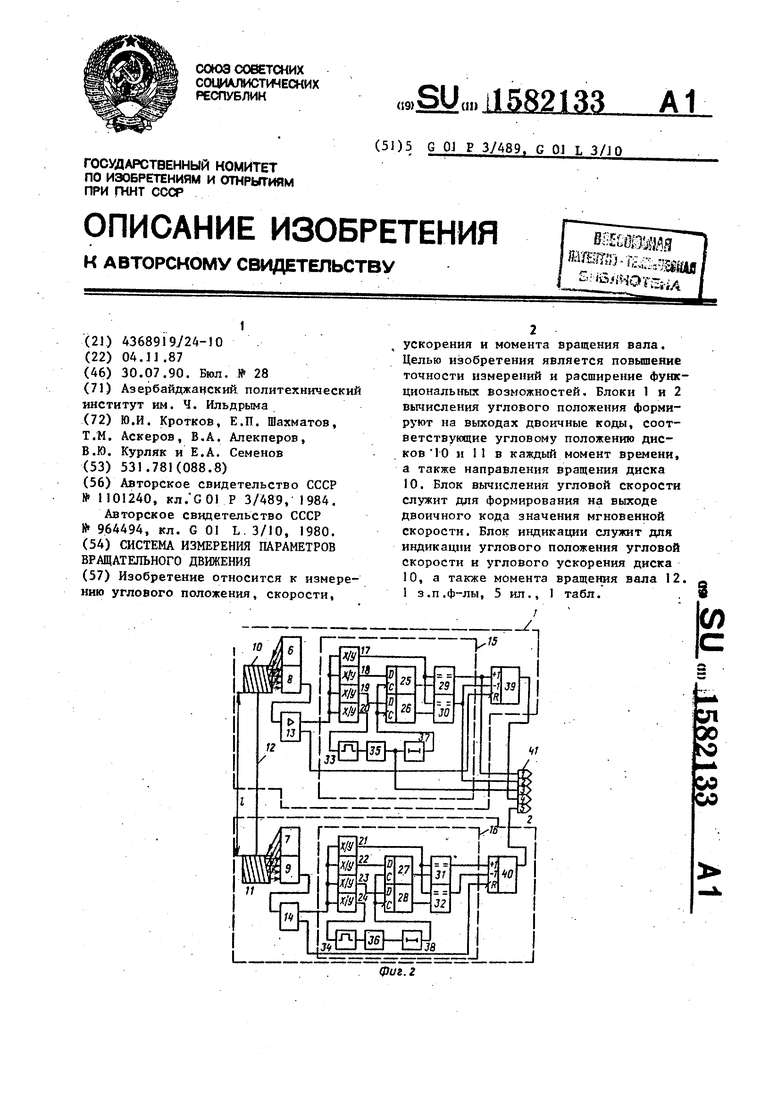
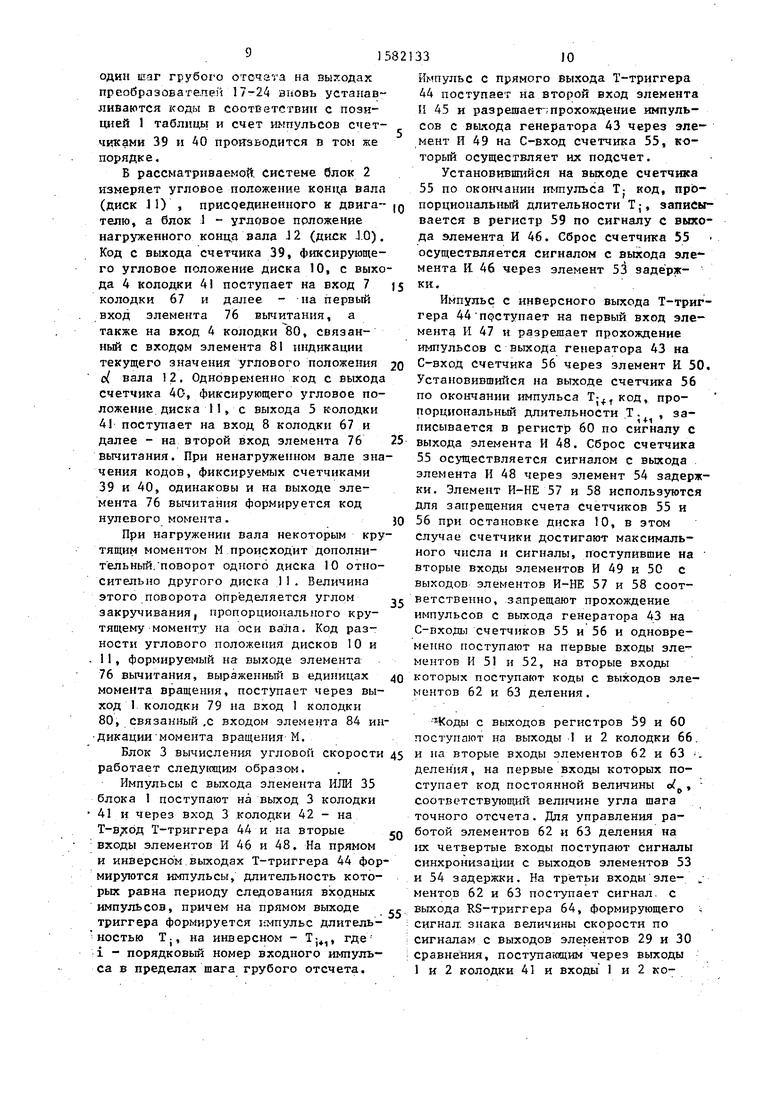
Середина шага IDydotO отсчета
Задний фронт штрило
конец шага ipyeoio отсчета
HanoatfltHut
S/rqx cie- moOuoeot
к- uao- тзбиоо
Шаг гру- йога отсчета Фиг 5
Фотодиод
HOVOaiкоицствНООК&
Блок фотодиоде
начало шага щбого omcvenja
