i
(21)4043375/22-03
(22)07.04.86
(46) 07.08.90. Бюл. № 29
(71)Подмосковный научно-исследовательский и проектно-конструкторский угольный институт
(72)С0И. Швыряев, Е.К. Заикин, Ю.П„ Дубовский, Л „С. Полей
и А.А. Подколзин
(53) 622.284(088.8)
(56) Авторское свидетельство СССР
N° 934050, кл. Е 21 D 23/16, 1982.
Патент Великобритании № 1295079, кл. Р 2 U, 1969.
(54) УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ СЕКЦИЕЙ КРЕПИ (57) Изобретение относится к горному делу и м.б. использовано для управления секциями механизированных крепей очистных комплексов и агрегатов. Цель - повышение эксплуатационной надежности. Устр-во включает коман- доаппарат 9 с толкателем 11, размещенным между рукоятью 10 и поршнем 13, расположенным внутри полого цилиндра 8. Последний гибким валом (ГВ) 7 связан с плунжером поворотного гидрораспределителя (ГР) 1. Поршень 13 выполнен с осевым отверстием, внут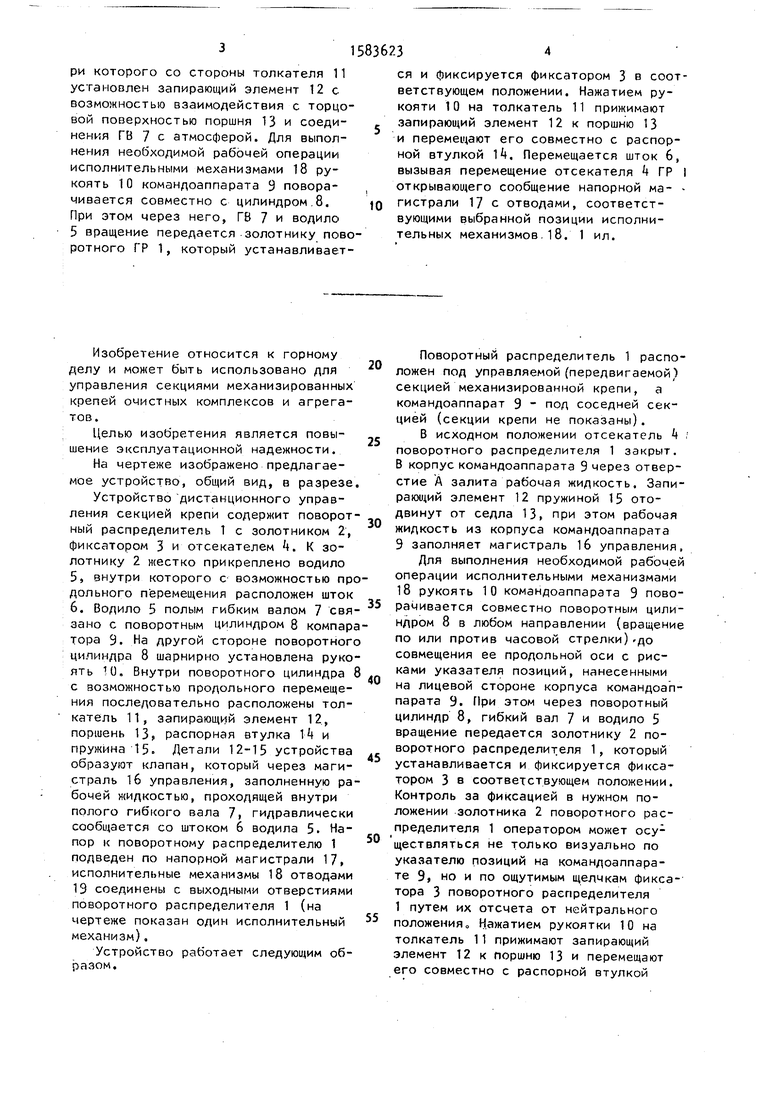
| название | год | авторы | номер документа |
|---|---|---|---|
| Блок управления секцией механизированной крепи | 1988 |
|
SU1740683A1 |
| Устройство для управления секцией гидрофицированной крепи | 1989 |
|
SU1705589A1 |
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ-ТРИПОДОМ | 2011 |
|
RU2501648C2 |
| Следящая система управления рабочим органом землеройной машины | 1985 |
|
SU1308721A1 |
| Гидравлическое распределительное устройство секции механизированной крепи | 1982 |
|
SU1129374A1 |
| Устройство для управления подачей давления в гидроцилиндры секций механизированных крепей | 1986 |
|
SU1597114A3 |
| Гидропривод управления рабочим оборудованием гидравлического экскаватора | 1988 |
|
SU1546574A1 |
| УСТРОЙСТВО ДЛЯ РАЗРУШЕНИЯ ГОРНЫХ ПОРОД ОТРЫВОМ ОТ МАССИВА | 1988 |
|
RU2079653C1 |
| Гидравлическое устройство управления для секции передвижной механизированной крепи | 1983 |
|
SU1396973A3 |
| ГИДРОПРИВОД одноковшового ЭКСКАВАТОРА | 1968 |
|
SU231395A1 |
Изобретение относится к горному делу и может быть использовано для управления секциями механизированных крепей очистных комплексов и агрегатов. Цель - повышение эксплуатационной надежности. Устройство включает командоаппарат 9 с толкателем 11, размещенным между рукоятью 10 и поршнем 13, расположенным внутри полого цилиндра 8. Последний гибким валом (ГВ) 7 связан с плунжером поворотного гидрораспределителя (ГР) 1. Поршень 13 выполнен с осевым отверстием, внутри которого со стороны толкателя 11 установлен запирающий элемент 12 с возможностью взаимодействия с торцовой поверхностью поршня 13 и соединения ГВ 7 с атмосферой. Для выполнения необходимой рабочей операции исполнительными механизмами 18 рукоять 10 командоаппарата 9 поворачивается совместно с цилиндром 8. При этом через него, ГВ 7 и водило 5 вращение передается золотнику поворотного ГР 1, который устанавливается и фиксируется фиксатором 3 в соответствующем положении. Нажатием рукояти 10 на толкатель 11 прижимают запирающий элемент 12 к поршню 13 и перемещают его совместно с распорной втулкой 14. Перемещается шток 6, вызывая перемещение отсекателя 4 ГР 1, открывающего сообщение напорной магистрали 17 с отводами, соответствующими выбранной позиции исполнительных механизмов 18. 1 ил.
(Л
31
ри которого со стороны толкателя 11 установлен запирающий элемент 12 с возможностью взаимодействия с торцовой поверхностью поршня 13 и соединения ГВ 7 с атмосферой. Для выполнения необходимой рабочей операции исполнительными механизмами 18 рукоять 10 командоаппарата 9 поворачивается совместно с цилиндром 8. При этом через него, ГВ 7 и водило 5 вращение передается золотнику пово ротного ГР 1, который устанавливаетИзобретение относится к горному делу и может быть использовано для управления секциями механизированных крепей очистных комплексов и агрегатов.
Целью изобретения является повы- шение эксплуатационной надежности.
На чертеже изображено предлагаемое устройство, общий вид, в разрезе.
Устройство дистанционного управления секцией крепи содержит поворот- ный распределитель 1 с золотником 2, фиксатором 3 и отсекателем k. К золотнику 2 жестко прикреплено водило
5,внутри которого с возможностью продольного перемещения расположен шток
ять 10. Внутри поворотного цилиндра 8 с возможностью продольного перемещения последовательно расположены толкатель 11, запирающий элемент 12, поршень 13, распорная втулка 1 и пружина 15. Детали 12-15 устройства образуют клапан, который через магистраль 16 управления, заполненную рабочей жидкостью, проходящей внутри полого гибкого вала 7, гидравлически сообщается со штоком 6 водила 5. Напор к поворотному распределителю 1 подведен по напорной магистрали 17, исполнительные механизмы 18 отводами 19 соединены с выходными отверстиями поворотного распределителя 1 (на чертеже показан один исполнительный механизм),
Устройство работает следующим образом.
ся и фиксируется фиксатором 3 в соответствующем положении. Нажатием рукояти 10 на толкатель 11 прижимают запирающий элемент 12 к поршню 13 и перемещают его совместно с распорной втулкой 14. Перемещается шток 6, вызывая перемещение отсекателя b ГР I открывающего сообщение напорной ма- - Ю гистрали 17 с отводами, соответствующими выбранной позиции исполнительных механизмов 18. 1 ил.
0
,
Поворотный распределитель 1 расположен под управляемой (передвигаемой) секцией механизированной крепи, а командоаппарат 9 под соседней секцией (секции крепи не показаны).
В исходном положении отсекатель k поворотного распределителя 1 закрыт.
8корпус командоаппарата 9 через отверстие А залита рабочая жидкость. Запирающий элемент 12 пружиной 15 отодвинут от седла 13, при этом рабочая жидкость из корпуса командоаппарата
9заполняет магистраль 16 управления,
Для выполнения необходимой рабочей операции исполнительными механизмами 18 рукоять 10 командоаппарата 9 поворачивается совместно поворотным цилиндром 8 в любом направлении (вращение по или против часовой стрелки)до совмещения ее продольной оси с рисками указателя позиций, нанесенными на лицевой стороне корпуса командоаппарата 9. При этом через поворотный цилиндр 8, гибкий вал 7 и водило 5 вращение передается золотнику 2 поворотного распределителя 1, который устанавливается и фиксируется фиксатором 3 в соответствующем положении. Контроль за фиксацией в нужном положении золотника 2 поворотного распределителя 1 оператором может осуществляться не только визуально по указателю позиций на командоалпара- те 9, но и по ощутимым щелчкам фиксатора 3 поворотного распределителя 1 путем их отсчета от нейтрального положения Нажатием рукоятки 10 на толкатель 11 прижимают запирающий элемент 12 к поршню 13 и перемещают его совместно с распорной втулкой
14, преодолевая сопротивление пружи- ны 15. При движении поршня 13 в замкнутом объеме магистрали 16 управления возникает повышенное давление, которое воздействует на шток 6 водила 5 Шток 6 перемещается, нажимает и вызывает перемещение отсекателя А поворотного распределителя 1, открывающего сообщение напорной магистрали 1 7 с отводами, соответствующими выбранной позиции исполнительных ме- ханизмов 18.
Для прекращения выполнения рабочей операции рукоять 10 отпускают, прекращая ее нажатие, при этом пружина 15 через распорную втулку t переместит поршень 13 совместно с запирающим элементом 12 в исходное положение, причем за счет давления в напорной магистрали 17 отсекатель 4 переместится и возвратит в исходное положение шток 6, а за счет остаточного давления в магистрали 16 управления запирающий элемент I2 отойдет от поршня 13 и установит в начальное положение толкатель 11 командоаппара- та У. При закрытии отсекателя k напорная магистраль 17 разобщается с
отводами 19 исполнительных механизмов 18, после чего рукоять 10 ко- мандоаппарата 9 поворачивают в исходное положение или соответствующее выполнению следующей рабочей операции.
0 Формула изобретения
Устройство дистанционного управления секцией крепи, включающее ко- мандоаппарат с толкателем, размещенным между рукоятью и поршнем, установленным внутри поворотного цилиндра, связанного полым гибким валом с плунжером поворотного гидрорас- пределителя, отличающееся тем, что, с целью повышения эксплуатационной надежности, поворотный цилиндр снабжен подпружиненным запирающим элементом, а поршень выполнен с осевым отверстиемfвнутри которого со стороны толкателя установлен запирающий элемент с возможностью взаимодействия с торцовой поверхностью поршня и соединения полости гибкого вала с атмосферой.
5
0
5
