Изобретение относится к машиностроению, а именно к средствам контроля зубчатых передач.
Цель изобретения - повышение точности измерения мертвого хода путем исключения погрешности, обусловленной неопределенностью поступления импульсов при изменении направления вращения передачи.
На фиг,1 изображена структурная, схема устройства для измерения мертвого хода зубчатых передач;на фиг.2 - структурная схема арифметического блока; На фиг.З - схема блока управления; на фиг,4 - схема формировате- JiIя импульсов.
Устройство для измерения мертвого хода зубчатых передач включает в себя два импульсных датчика 1 и 2 с точньм отсчетом угла, установленные на ведущем и ведомом валах контролируемой я« передачи.З, два импульсных датчика 4 И 5 с грубым отсчетом угла поворота ведущего и ведомого валов передачи 3, блок 6 измерения кинематической погрешности, входами соединенный с датчиками 1 и 2, арифметический, блок 7 и блок 8.управления. Первый вход арифметического блока 7 соединен с выходом блока 6 измерения кинематической погрешности, первый вход блока 8 управления и второй вход арифметического блока 7 подключены к датчику 1, третий и четвертый входы арифметического блока 7 связаны соответственно с первым и вторым выходами блока 8 управления.
метками датчиков 1 и 2; F - вес младшего разряда блок измерения кинематической погрешности.
По команде с второго выхода бло 8 управления при прямом вращении у ножитель увеличивает частоту следо
В устройство входят логическая схема-И 9, умножитель 10 частоты еле- 40 дования импульсов, первый и второй входы которого соединены с датчиками
Iи 2, третий - с вторым выходом блока 8 управления, выход связан с первым входом логической схемы И 9, вто- 45 вания импульсов в клнале ведущего рой вход логической схемы И 9 соединен с третьим выходом блока 8 управления, управляемые формирователи 11
и 12 импульсов и реверсивные счетчики 13 - 15, Первые входы формирователей
IIи 12 соединены с датчиками 4 и 5 угяа, вторые входы формирователей и первые входы реверсивных счетчиков 13 и 15 подключены к второму выходу блока 8 управления, вторые входы счетчиков соединены с четвертым выходом блока управления, третьи входы реверсивных счетчиков 13 и 14 соединены соответственно с выходами перво50
55
звена, при обратном - в канале вед мого звена.
Блок 16 регистров памяти служит для фиксации значений кинематическ погрешности по командам блока 8 уп равления. Он может быть реализован на микросхемах К155ТМ8, К155ТМ9, И формационные входы регистров пр этом соединяются параллельно по разрядам и подключаются к выход блока 6 измерения кинематической п грешности, тактовые входы соединяю ся с соответствующими выходами бло
o
5
0 5
0
5
го и второго формирователей 11 и 12, третий вход реверсивного счетчика 15 подключен к выходу схемы И 9, выходы реверсивных счетчиков 13 и 14 подключены к четвертому и пятому входам блока 8 управления,
Устройство содержит также блок 16 регистров памяти и схему 17 алгебраического сложения чисел. Первый вход блока 16 регистров связан с выходом блока 6 измерения кинематической погрешности, второй и третий входы соединены с пятым и шестым выходами блбка 8 управления, входы схемы 17 алгебраического сложения соединены соответственно с выходами арифметического блока 7, блока 16 регистров памяти и реверсивного счетчика 15.
Блок 6 измерения кинематической погрешности является стандартным узлом В качестве его можно использовать любое устройство, обеспечивающее измерение кинематической погрешности с необходимой точностью на задаваемых режимах работы передачи и представление результатов измерения в цифровой форме.
Умножитель 10 частоты следования импульсов является стандартным узлом и используется по прямому назначению. Коэффициент умножения К является постоянным и выбирается из условия
К -
к - --,
где utf - угловое расстояние между
метками датчиков 1 и 2; F - вес младшего разряда блока измерения кинематической погрешности.
По команде с второго выхода блока 8 управления при прямом вращении умножитель увеличивает частоту следо0
5 вания импульсов в клнале ведущего
вания импульсов в клнале ведущего
звена, при обратном - в канале ведомого звена.
Блок 16 регистров памяти служит для фиксации значений кинематической погрешности по командам блока 8 управления. Он может быть реализован на микросхемах К155ТМ8, К155ТМ9, Информационные входы регистров при этом соединяются параллельно по разрядам и подключаются к выходу блока 6 измерения кинематической погрешности, тактовые входы соединяются с соответствующими выходами блока
314289104
8 управления. Входы установки в ноль 22 и 23, первые входы коммутаторов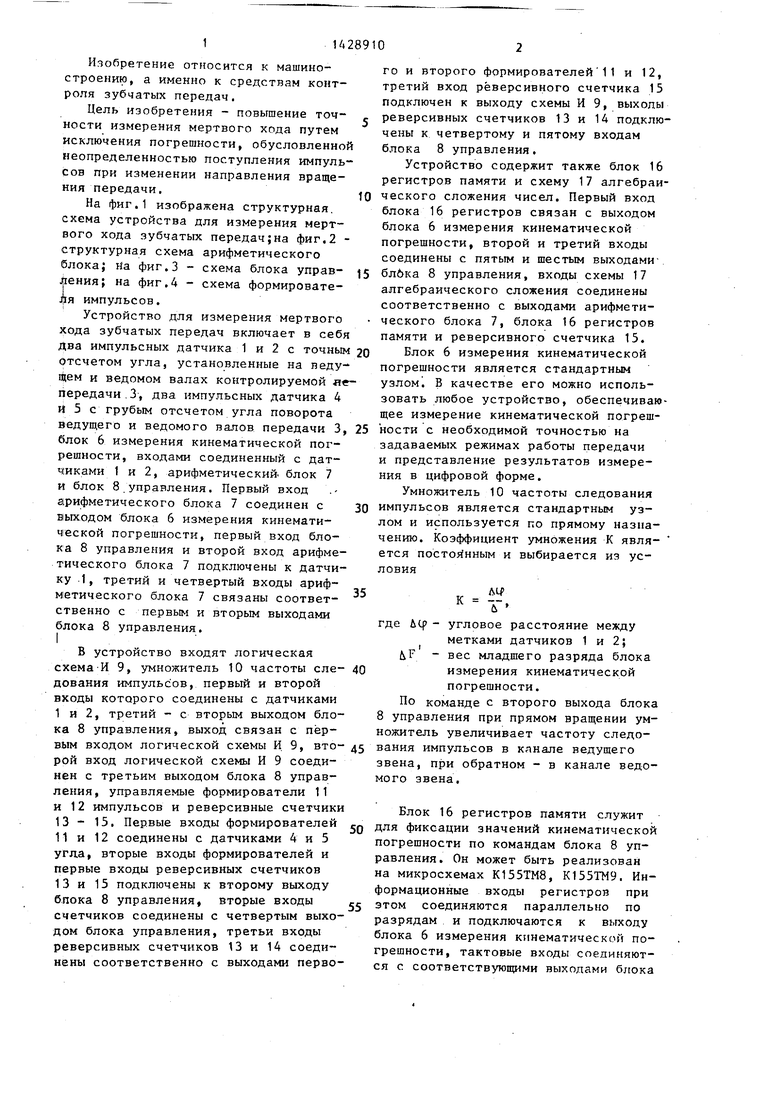


| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКАНАЛЬНАЯ СИСТЕМА ДЛЯ РЕГИСТРАЦИИ ФИЗИЧЕСКИХ ВЕЛИЧИН | 1991 |
|
RU2037190C1 |
| Устройство для анализа кинематической погрешности зубчатых передач | 1984 |
|
SU1227945A1 |
| Устройство для измерения кинематической погрешности зубчатых передач | 1988 |
|
SU1585664A1 |
| Устройство для измерения давления | 1988 |
|
SU1569610A1 |
| Способ определения температуры и влажности воздуха и устройство для его осуществления | 1990 |
|
SU1783400A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1984 |
|
SU1237902A1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1084852A1 |
| Устройство для измерения частоты гармонического сигнала | 1987 |
|
SU1525607A1 |
| Устройство для измерения механических величин | 1989 |
|
SU1737287A1 |
| Многодвигательный электропривод переменного тока | 1985 |
|
SU1307521A1 |


Изобретение относится к машиностроению, а именно к средствам для контроля зубчатых колес. Цель изобретения - повьшение точности путем исключения погрешности, обусловленной неопределенностью поступления импульсов при изменении направления вращения, передачи. Это достигается тем, что устройство содержит импульсные датчики 1, 2 и 4, 5с точным и грубым отсчетами угла поворота соответственно, установленные на валах зубчатой передачи, блок 6 измерения кинематической погрешности, арифметический блок 7 для определения мертвого хода по кинематической погрешности прямого и обратного хода, блоки определения величины неопределенности поступления импульсов при измерении направления вращения и корректировки результатов. Неопределенность поступления импульсов получают сравнением разности положения метки датчика с грубым отсчетом угла ведомого вала зубчатой передачи и показаний блока измерения кинематической погрешности для одного и того же положения ведущего вала при прямом и обратном ходах зубчатой передачи. Для фиксации положений ва-. лов используются реверсивные счетчики импульсов соответствующих датчиков грубого отсчета угла, поступающих при остановке и разгоне стенда. 4 ил. S (Л 4ib 1C оо со --1--1Т1----О futf о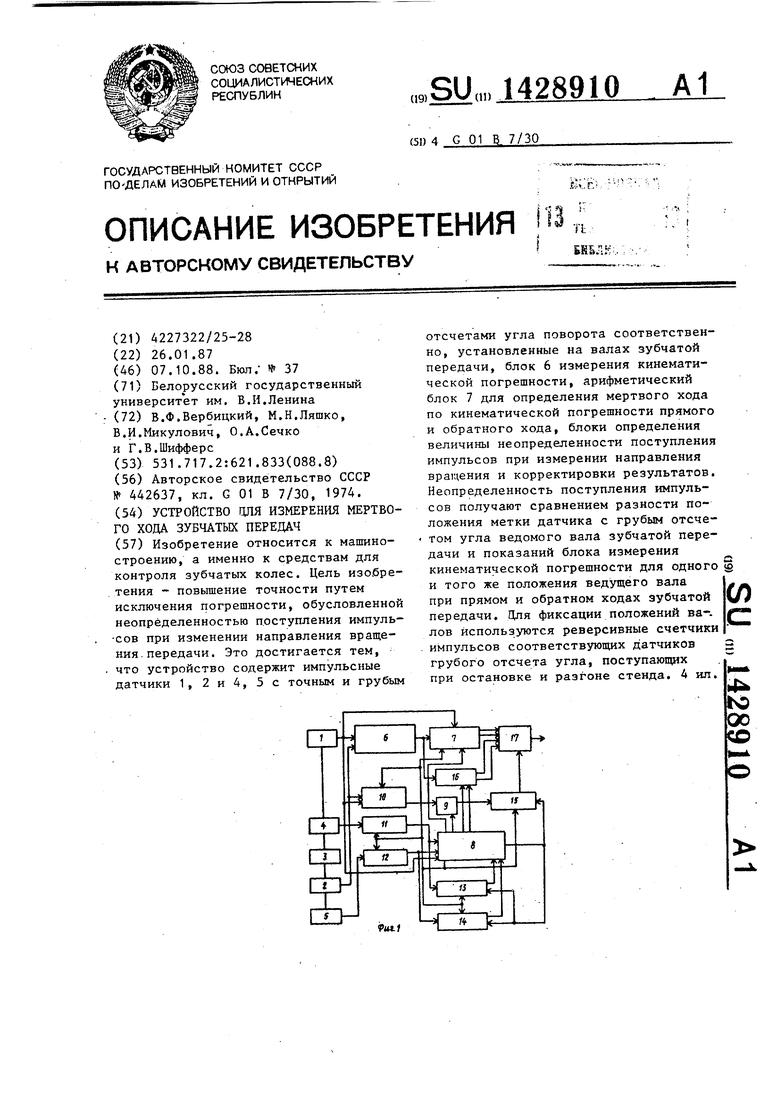
не используются.
Логическая схема И 9 по команде с блока 8 управления может пропускать импульсы с выхода умножителя 10 частоты либо задерживать их. В качестве ее можно использовать один элемент микросхемы К155ЛИ1,
В качестве реверсивных счетчиков 13 - 15 могут быть использованы микросхемы типа К531ИЕ17.Управляющие входы направления счета при этом соединяются с вторым выходом блока 8 управления, вход разрешения затем используется для установки счетчиков в исходное состояние и соединяется с четвертым выходом блока управления.
Схема 17 алгебраического сложения служит для получения текущей суммы цифровых кодов, поступающих на ее входы с соответствующими знаками. Она может быть реализована на микросхемах К155гаЗ или К555ИМ7, позволяющих производить как операцию суммирования, так и вычитания.
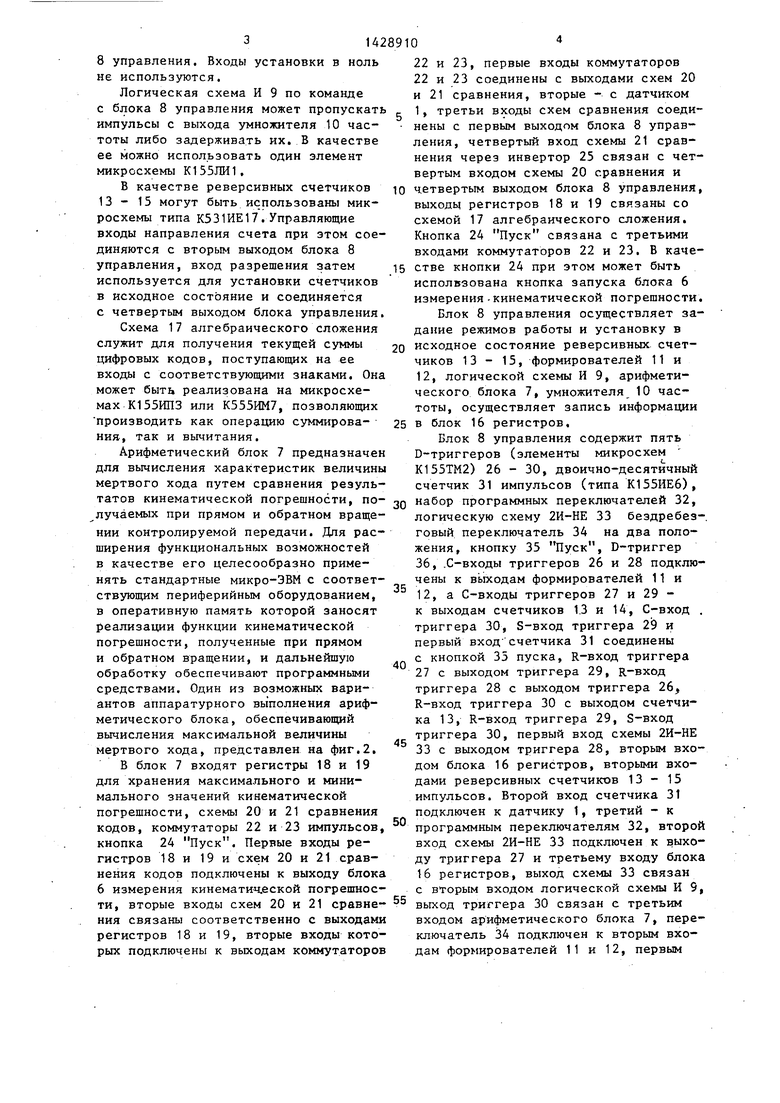
Арифметический блок 7 предназначен для вьмисления характеристик величины мертвого хода путем сравнения результатов кинематической погрешности, по- лучаемых при прямом и обратном вращении контролируемой передачи. Для расширения функциональных возможностей в качестве его целесообразно применять стандартные микро-ЭВМ с соответствующим периферийным оборудованием, в оперативную память которой заносят реализации функции кинематической погрешности, полученные при прямом и обратном вращении, и дальнейшую обработку обеспечивают программными средствами. Один из возможных вариантов аппаратурного выполнения арифметического блока, обеспечивающий вычисления максимальной величины мертвого хода, представлен на фиг.2.
В блок 7 входят регистры 18 и 19 для хранения максимального и минимального значений кинематической погрешности, схемы 20 и 21 сравнения кодов, коммутаторы 22 и 23 импульсов, кнопка 24 Пуск. Первые входы регистров 18 и 19 и схем 20 и 21 сравнения кодов подключены к выходу блока 6 измерения кинематической погрешнос22 и 23 соединены с выходами схем 20 и 21 сравнения, вторые - с датчиком
(, 1, третьи входы схем сравнения соеди- - нены с первым выходом блока 8 управления, четвертый вход схемы 21 сравнения через инвертор 25 связан с четвертым входом схемы 20 сравнения и
10 четвертым выходом блока 8 управления, выходы регистров 18 и 19 связаны со схемой 17 алгебраического сложения. Кнопка 24 Пуск связана с третьими входами коммутаторов 22 и 23. В каче15 стве кнопки 24 при этом может быть исполвзована кнопка запуска блока 6 измерения-кинематической погрешности. Блок 8 управления осуществляет задание режимов работы и установку в
20 исходное состояние реверсивных счетчиков 13 - 15, формирователей 11 и 12, логической схемы И 9, арифметического блока 7, умножителя 10 частоты, осуществляет запись информации
25 в блок 16 регистров.
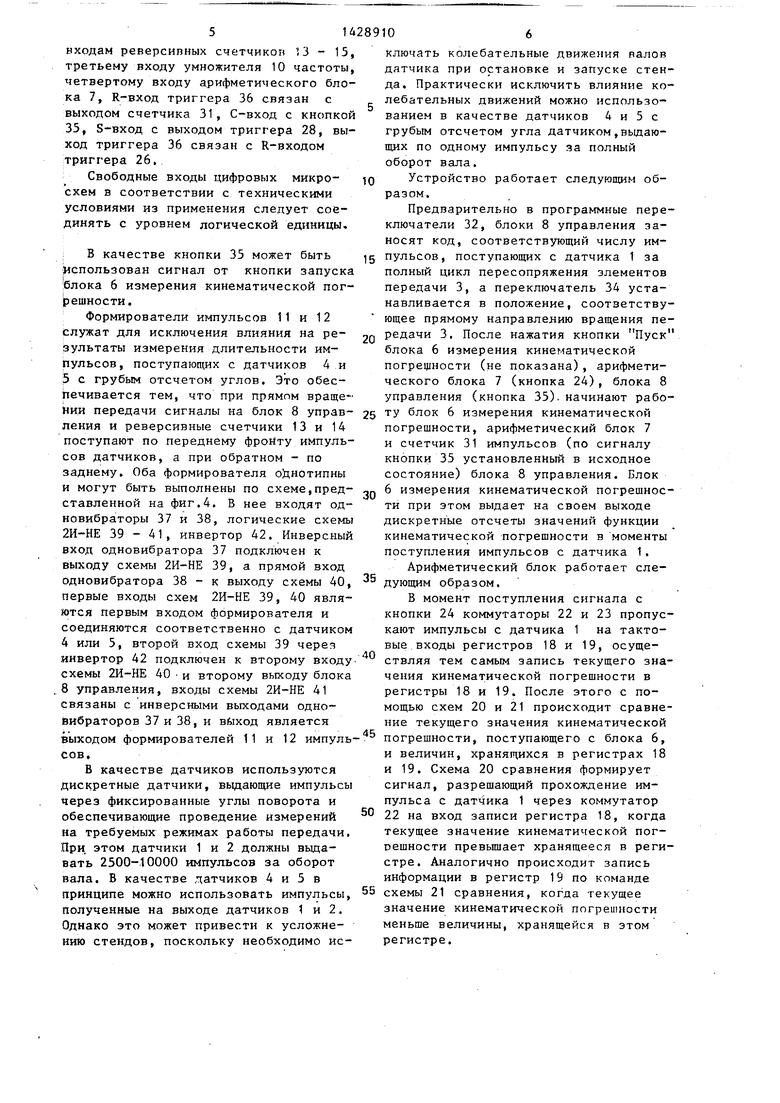
Блок 8 управления содержит пять D-триггеров (элементы микросхем К155ТМ2) 26 - 30, двоично-десятичный счетчик 31 импульсов (типа К155ИЕ6), набор программных переключателей 32, логическую схему 2И-НЕ 33 бездребез- говый переключатель 34 на два положения, кнопку 35 Пуск, D-триггер 36, .С-входы триггеров 26 и 28 подключены к вьгходам формирователей 11 и 12, а С-входы триггеров 27 и 29 - к выходам счетчиков 1.3 и 14, С-вход . триггера 30, S-вход триггера 29 и первый ВХОД счетчика 31 соединены с кнопкой 35 пуска, R-вход триггера 27 с выходом триггера 29, R-вход триггера 28 с выходом триггера 26, R-вход триггера 30 с выходом счетчика 13, R-вход триггера 29, S-вход триггера 30, первый вход схемы 2И-НЕ 33 с выходом триггера 28, вторым входом блока 16 регистров, вторыми входами реверсивных счетчиков 13 - 15 импульсов. Второй вход счетчика 31 подключен к датчику 1, третий - к программным переключателям 32, второй вход схемы 2И-НЕ 33 подключен к выходу триггера 27 и третьему входу блока 16 регистров, выход схемы 33 связан с вторым входом логической схемы И 9,
30
35
40
45
50
ти, вторые входы схем 20 и 21 сравне- 5 триггера 30 связан с третьим ния связаны соответственно с выходами входом арифметического блока 7, перерегистров 18 и 19, вторые входы кото- ключатель 34 подключен к вторым вхо- рых подключены к выходам коммутаторов дам формирователей 11 и 12, первым
22 и 23 соединены с выходами схем 20 и 21 сравнения, вторые - с датчиком
, 1, третьи входы схем сравнения соеди- - нены с первым выходом блока 8 управления, четвертый вход схемы 21 сравнения через инвертор 25 связан с четвертым входом схемы 20 сравнения и
0 четвертым выходом блока 8 управления, выходы регистров 18 и 19 связаны со схемой 17 алгебраического сложения. Кнопка 24 Пуск связана с третьими входами коммутаторов 22 и 23. В каче5 стве кнопки 24 при этом может быть исполвзована кнопка запуска блока 6 измерения-кинематической погрешности. Блок 8 управления осуществляет задание режимов работы и установку в
0 исходное состояние реверсивных счетчиков 13 - 15, формирователей 11 и 12, логической схемы И 9, арифметического блока 7, умножителя 10 частоты, осуществляет запись информации
5 в блок 16 регистров.
Блок 8 управления содержит пять D-триггеров (элементы микросхем К155ТМ2) 26 - 30, двоично-десятичный счетчик 31 импульсов (типа К155ИЕ6), набор программных переключателей 32, логическую схему 2И-НЕ 33 бездребез- говый переключатель 34 на два положения, кнопку 35 Пуск, D-триггер 36, .С-входы триггеров 26 и 28 подключены к вьгходам формирователей 11 и 12, а С-входы триггеров 27 и 29 - к выходам счетчиков 1.3 и 14, С-вход . триггера 30, S-вход триггера 29 и первый ВХОД счетчика 31 соединены с кнопкой 35 пуска, R-вход триггера 27 с выходом триггера 29, R-вход триггера 28 с выходом триггера 26, R-вход триггера 30 с выходом счетчика 13, R-вход триггера 29, S-вход триггера 30, первый вход схемы 2И-НЕ 33 с выходом триггера 28, вторым входом блока 16 регистров, вторыми входами реверсивных счетчиков 13 - 15 импульсов. Второй вход счетчика 31 подключен к датчику 1, третий - к программным переключателям 32, второй вход схемы 2И-НЕ 33 подключен к выходу триггера 27 и третьему входу блока 16 регистров, выход схемы 33 связан с вторым входом логической схемы И 9,
0
5
0
5
0
5 триггера 30 связан с третьим входом арифметического блока 7, переключатель 34 подключен к вторым вхо- дам формирователей 11 и 12, первым
входам реверсивных счетчиков t3 - 15, третьему входу умножителя 10 частоты, четвертому входу арифметического блока 7, R-вход триггера 36 связан с выходом счетчика 31, С-вход с кнопкой 35, S-вход с выходом триггера 28, выход триггера 36 связан с R-входом триггера 26,
Свободные входы цифровых микросхем в соответствии с техническими условиями из применения следует соединять с уровнем логической единицы.
: в качестве кнопки 35 может быть 1спользован сигнал от кнопки запуска блока 6 измерения кинематической пог- |решности.
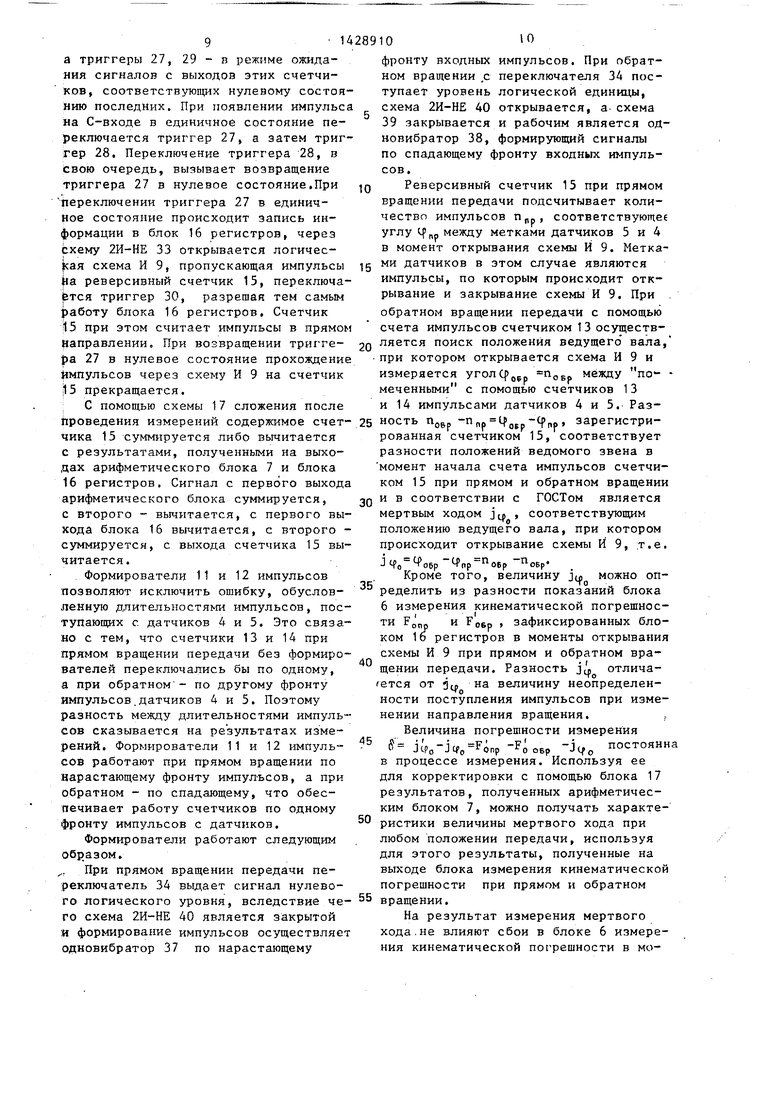
Формирователи импульсов 11 и 12 служат для исключения влияния на результаты измерения длительности импульсов, поступающих с датчиков Аи 5 с грубым отсчетом углов. Это обеспечивается тем, что при прямом вращении передачи сигналы на блок 8 управ- 25 блок 6 измерения кинематической ления и реверсивные счетчики 13 и 14 погрешности, арифметический блок 7
и
30
35
поступают по переднему фройту импульсов датчиков, а при обратном - по заднему. Оба формирователя однотипны и могут быть выполнены по схеме,представленной на фиг.4. В нее входят од- новибраторы 37 и 38, логические схемы 2И-НЕ 39 - 41, инвертор 42. Инверсный вход одновибратора 37 подключен к выходу схемы 2И-НЕ 39, а прямой вход одновибратора 38 - к выходу схемы 40, первые входы схем 2И-НЕ 39, 40 являются первым входом формирователя и соединяются соответственно с датчиком 4 или 5, второй вход схемы 39 через инвертор 42 подключен к второму входу схемы 2И-НЕ 40 и второму выходу блока .8 управления, входы схемы 2И-НЕ 41 связаны с инверсными выходами одно- вибраторов 37 и 38, и вЬ1ход является выходом формирователей 11 и 12 импульсов,
В качестве датчиков используются дискретные датчики, вьщающие импульсы через фиксированные углы поворота и обеспечивающие проведение измерений на требуемых режимах работы передачи При. этом датчики 1 и 2 должны выдавать 2500-10000 импульсов за оборот вала. В качестве датчиков 4 и 5 в
40
50
счетчик 31 импульсов (по сигналу кнопки 35 установленный в исходное состояние) блока 8 управления. Блок 6 измерения кинематической погрешнос ти при этом выдает на своем выходе дискретные отсчеты значений функции кинематической погрешности в моменты поступления импульсов с датчика 1.
Арифметический блок работает следующим образом.
В момент поступления сигнала с кнопки 24 коммутаторы 22 и 23 пропус кают импульсы с датчика 1 на тактовые входы регистров 18 и 19, осуществляя тем самым запись текущего зна чения кинематической погрешности в регистры 18 и 19. После этого с помощью схем 20 и 21 происходит сравне ние текущего значения кинематической погрешности, поступающего с блока 6, и величин, хранящихся в регистрах 18 и 19. Схема 20 сравнения формирует сигнал, разрешающий прохождение импульса с датчика 1 через коммутатор 22 на вход записи регистра 18, когда текущее значение кинематической погрешности превышает хранящееся в реги стре. Аналогично происходит запись информации в регистр 19 по команде
принципе можно использовать импульсы, 55 схемы 21 сравнения, когда текущее полученные на выходе датчиков 1 и 2. значение кинематической погрешности Однако это может привести к усложне- меньше величины, хранящейся в этом нию стендов, поскольку необходимо ис- регистре.
5
0
ключать колебательные движения валов датчика при остановке и запуске стенда. Практически исключить влияние колебательных движений можно использованием в качестве датчиков 4 и 5 с грубым отсчетом угла датчиком,выдающих по одному импульсу за полный оборот вала.
Устройство работает следующим образом.
Предварительно в программные переключатели 32, блоки 8 управления заносят код, соответствующий числу импульсов, поступающих с датчика 1 за полный цикл пересопряжения элементов передачи 3, а переключатель 34 устанавливается в положение, соответствующее прямому направлению вращения передачи 3, После нажатия кнопки Пуск блока 6 измерения кинематической погрещности (не показана), арифметического блока 7 (кнопка 24), блока 8 управления (кнопка 35). начинают рабои
0
5
0
0
счетчик 31 импульсов (по сигналу кнопки 35 установленный в исходное состояние) блока 8 управления. Блок 6 измерения кинематической погрешности при этом выдает на своем выходе дискретные отсчеты значений функции кинематической погрешности в моменты поступления импульсов с датчика 1.
Арифметический блок работает следующим образом.
В момент поступления сигнала с кнопки 24 коммутаторы 22 и 23 пропускают импульсы с датчика 1 на тактовые входы регистров 18 и 19, осуществляя тем самым запись текущего значения кинематической погрешности в регистры 18 и 19. После этого с помощью схем 20 и 21 происходит сравнение текущего значения кинематической погрешности, поступающего с блока 6, и величин, хранящихся в регистрах 18 и 19. Схема 20 сравнения формирует сигнал, разрешающий прохождение импульса с датчика 1 через коммутатор 22 на вход записи регистра 18, когда текущее значение кинематической погрешности превышает хранящееся в регистре. Аналогично происходит запись информации в регистр 19 по команде
ния регистр 18 выделяет максимальное из значений кинематической погрешности, а регистр 19 - минимальное. При этом обе схемы 20 и 21 сравнения кодов выключаются при остановке оборудования по команде триггера 30 блока 8 управления, а по командам переключателя 34 схема 20 сравнения включается только при прямом вращении передачи, а схема 21 - при обратном. Это обеспечивает поиск максимального значения кинематической погрешности при прямом вращении переда- 15 водится в нулевое состояние, а триг- чи, а минимального - при обратном.
гер З О - в единичное. Последний осуществляет выключение арифметического блока 7 подачей соответствующего сигнала на схемы 20 и 21 сравнения.
При выключении триггера 28 в нулевое состояние происходит запись текущего значения кинематической погрешности с блока 6 в момент закрывания схемы И 9 в блок 16 регистров по ко- 26 - 29- не реагируют на сигналы, пос- 25 манде, поступающей на его второй тупающие с выходов формирователей 11 . Запись информации в счетчики и 12 и реверсивных счетчиков 13и14, 13-15и блок 16 производится по поскольку сигналы, поступающие на фронтам импульса, а если использовать С-входы триггеров 26 и 29, подтверж- регистры или счетчики с потенциаль- дают их единичное состояние и удержи- 30 ными входами записи, то на их входах
Блок управления работает следующим образом.
По сигналу с кнопки 35 счетчик 31 устанавливается в исходное состояние, 2о триггер 30 переводится в состояние, разрешающее работу схем 21 и 22 сравнения, триггеры 29 и 36 устанавливаются в единичное состояние. Триггеры
вают тем самьп в нулевом состоянии триггеры 27 и 28, пока не произойдет полный цикл пересопряжения элементов передачи. После того, как на счетчик 31 поступит количество импульсов, соответствующее полному циклу пересопряжения элементов передачи, триггер 36 по сигналу с выхода счетчика переключается в нулевое состояние. Это вызывает в свою очередь переключение триггера 26 и снятие нулевого уровня .с R-входа триггера 28, который переходит в режим ожидания импульса по С-входу с датчика 5. По поступлении этого импульса триггер 28 переводится в единичное состояние, переключает триггер 36 и тем самым переводит триггер 26 в режим ожидания очередного импульса с датчика 4. После поступления этого импульса триггер 26 возвращается в единичное состояние, устанавливает в единичное состояние триггер 28 и в дальнейшем эти триггеры опять перестают реагировать на сигналы с формирователей 11 и 12. Таким образом, при поступлении первого импульса с выхода формирователя 12, после появления сигнала на выходе счетчика 31 импульсов, триггер
35
40
45
50
55
можно установить одновибраторы, вырабатывающие короткие импульсы по соответствующему фронту сигнала с выхода триггера 28. При этом счетчики 13 и 15 устанавливаются в нулевое состояние, а в младший разряд счетчика 14 устанавливается единица, поскольку . он пропускает один импульс с формирователя.
После этого счетчики 13 и 14 осуществляют счет импульсов в прямом направлении, а счетчик 15 - в обратном. Направление счета задается с помощью переключателя 34.
Производят остановку оборудования, включающего в себя привод (не показан), датчики 1 - 5 и передачу 3. После полной остановки передачи 3 переключатель 34 переводят в противоположное положение и осуществляют вращение в обратном направлении. При остановке и разгоне оборудования арифметический блок 7 по команде с триггера 30 находится в выключенном состоянии, чтобы исключить проведение измерений на переходных режимах.
При вращении передачи в обратном направлении счетчики 13 и 14 находятся в состоянии реверсивного счета.
а при поступлении очередного импульса с формирователя 11 возвращается в единичное. В момент переключения триггера 28 в нулевое состояние счетчики 13 - 15 импульсов устанавливаются в исходное состояние, а через схему 2И-НЕ 33 открывается логическая схема И 9, которая пропускает импульсы с умножителя 10 частоты на реверсивный счетчик 15 до возвращения триггера 28 в единичное состояние. Одновременно с этим триггер 29 пере5
0
5
0
5
можно установить одновибраторы, вырабатывающие короткие импульсы по соответствующему фронту сигнала с выхода триггера 28. При этом счетчики 13 и 15 устанавливаются в нулевое состояние, а в младший разряд счетчика 14 устанавливается единица, поскольку . он пропускает один импульс с формирователя.
После этого счетчики 13 и 14 осуществляют счет импульсов в прямом направлении, а счетчик 15 - в обратном. Направление счета задается с помощью переключателя 34.
Производят остановку оборудования, включающего в себя привод (не показан), датчики 1 - 5 и передачу 3. После полной остановки передачи 3 переключатель 34 переводят в противоположное положение и осуществляют вращение в обратном направлении. При остановке и разгоне оборудования арифметический блок 7 по команде с триггера 30 находится в выключенном состоянии, чтобы исключить проведение измерений на переходных режимах.
При вращении передачи в обратном направлении счетчики 13 и 14 находятся в состоянии реверсивного счета.
a триггеры 27, 29 - п режиме ожидания сигналов с выходов этих счетчиков, соответствующих нулевому состоянию последних. При появлении импульса на С-входе в единичное состояние переключается триггер 27, а затем триггер 28. Переключение триггера 28, в Свою очередь, вызывает возвращение триггера 27 в нулевое состояние,При переключении триггера 27 в единичное состояние происходит запись информации в блок 16 регистров, через ёхему 2И-НЕ 33 открывается логичес- |кая схема И 9, пропускающая импульсы |«а реверсивный счетчик 15, переключа- Ьтся триггер 30, разрешая тем самым работу блока 16 регистров. Счетчик 15 при этом считает импульсы в прямом направлении. При возвращении триггера 27 в нулевое состояние прохождение импульсов через схему И 9 на счетчик }15 прекращается.
С помощью схемы 17 сложения после
проведения измерений содержимое счет- 25 ность „. -ср , зарегистри- чика 15 суммируется либо вычитается рованная счетчиком 15, соответствует
с результатами, полученными на выходах арифметического блока 7 и блока 16 регистров. Сигнал с первого выхода арифметического блока суммируется, с второго - вычитается, с первого вы- кода блока 16 вычитается, с второго - суммируется, с выхода счетчика 15 вычитается.
Формирователи 11 и 12 импульсов
30
разности положений ведомого звена в момент начала счета импульсов счетчиком 15 при прямом и обратном вращении и в соответствии с ГОСТом является мертвым ходом j , соответствующим положению ведущего вала, при котором происходит открывание схемы И 9, т.е
JM o
оБр
Обр Ч пр ОЕр
кроме того, величину jtn можно оппозволяют исключить ошибку, обуслов- ределить из разности показаний блока
ленную длительностями импульсов, поступающих с датчиков 4 и 5. Это связано с тем, что счетчики 13 и 14 при прямом вращении передачи без формирователей переключались бы по одному, а при обратном - по другому фронту импульсов.датчиков 4 и 5, Поэтому разность между длительностями импульсов сказывается на результатах измерений. Формирователи 11 и 12 импульсов работают при прямом вращении по Нарастающему фронту импуяьсов, а при обратном - по спадающему, что обеспечивает работу счетчиков по одному фронту импульсов с датчиков,
Формирователи работают следующим образом.
. При прямом вращении передачи переключатель 34 выдает сигнал нулево6 измерения кинематической погрешности РОПЛ и Foep . зафиксированных блоinp
16
40
45
50
ком 1Ь регистров в моменты открывания схемы И 9 при прямом и обратном вращении передачи. Разность j отлича- ется от Зц, на величину неопределенности поступления импульсов при изменении направления вращения.
Величина погрешности измерения « j po-JV, -Р;,р -Jt постоянна в процессе измерения. Используя ее для корректировки с помощью блока 17 результатов, полученных арифметическим блоком 7, можно получать характеристики величины мертвого хода при любом положении передачи, используя для этого результаты, полученные на выходе блока измерения кинематической погрешности при прямом и обратном
Го логического уровня, вследствие че- вращении, го схема 2И-НЕ 40 является закрытой На результат измерения мертвого И формирование импульсов осуществляет хода.не влияют сбои в блоке 6 измере- одновибратор 37 по нарастающему ния кинематической погрешности в мофронту входных импульсов. При обратном вращении с. переключателя 34 поступает уровень логической единицы, схема 2И-НЕ 40 открывается, а схема 39 закрывается и рабочим является од- новибратор 38, формирующий сигналы по спадающему фронту входных импульсов,
Реверсивный счетчик 15 при прямом вращении передачи подсчитывает количество импульсов , соответствующее углу Ц „„между метками датчиков 5 и 4 в момент открывания схемы И 9. Метками датчиков в этом случае являются импульсы, по которым происходит открывание и закрывание схемы И 9, При . обратном вращении передачи с помощью счета импульсов счетчиком 13 осуществляется поиск положения ведущего вала, при котором открывается схема И 9 и измеряется уголсрд р Пор между по- - меченными с помощью счетчиков 13 и 14 импульсами датчиков 4 и 5. Раз0
разности положений ведомого звена в момент начала счета импульсов счетчиком 15 при прямом и обратном вращении и в соответствии с ГОСТом является мертвым ходом j , соответствующим положению ведущего вала, при котором происходит открывание схемы И 9, т.е.
JM o
оБр
Обр Ч пр ОЕр
кроме того, величину jtn можно определить из разности показаний блока
6 измерения кинематической погрешности РОПЛ и Foep . зафиксированных блоinp
16
ком 1Ь регистров в моменты открывания схемы И 9 при прямом и обратном вращении передачи. Разность j отлича- ется от Зц, на величину неопределенности поступления импульсов при изменении направления вращения.
Величина погрешности измерения « j po-JV, -Р;,р -Jt постоянна в процессе измерения. Используя ее для корректировки с помощью блока 17 результатов, полученных арифметическим блоком 7, можно получать характеристики величины мертвого хода при любом положении передачи, используя для этого результаты, полученные на выходе блока измерения кинематической погрешности при прямом и обратном
1114289(0
мент остановки и начала обратного вращения датчиков, когда с выходов датчиков 1 и 2 могут поступать ложные импульсы. Это приводит ;шшь к росту величины 8, которая вычитается затем из результатов измерений.
Формула изобретения
Устройство для измерения мертвог хода зубчатых передач, содержащее преобразователи угла поворота ведущего и ведомого валов контролируемой передачи с грубым и точным отсчетами блок измерения кинематической погреш ности, первым и вторым входами связанный с датчиками углов поворота ведущего и ведомого валов с точным отсчетом валов, арифметический блок, первым входом подключенный к выходу блока измерения кинематической погрешности, вторым входом - к датчику точного отсчета угла поворота ведущего вала передачи, блок управления, первым входом связанный с датчиком точного отсчета угла поворота ведущего, первьм и вторым выходами соответственно - с третьим и четвертым входами арифметического блока, отличающееся тем, что, с целью повышения точности измерения мертвого хода, оно снабжено умножи- телем частоты следования импульсов, первым и вторым входами связанным с датчиками точного отсчета угла поворота ведущего и ведомого валов передачи, третьим входом - с вторым выходом блока управления, логической схемой И, первым входом связанной
12
0
д
5
0
5
с выходом умножителя частоты, вторым входом - с треты м выходом блока управления, первым и вторым управляемыми формирователями импульсов, связанными первыми входами соответственно с датчиками грубого отсчета угла поворота ведущего и ведомого валов передачи, вторым входом подключенные к второму выходу блока управления, выходами связанные соответственно с вторым и третьим входами блока управления, первым, вторым и третьим реверсивными счетчиками импульсов, первыми входами соединенными с вторым входом блока управления, вторыми входами - с .четвертым выходом блока управления, третий вход первого реверсивного счетчика связан с выходом первого формирователя импульсов, третий вход второго реверсивного счетчика связан с выходом второго формирователя импульсов, третий вход третьего реверсивного счетчика связан с выходом логической схемы И, выходы первого и второго реверсивных счетчиков соединены с оответственно с четвертым и пятым входами блока управления, блоком регистров памяти, первым входом связанным с выходом блока измерения кинематической погрешности, вторым, третьим входами - с пятым, шестым выходами блока управления, схемой Алгебраического сложения, первым и вторым входами связанной с выходами арифметического блока, третьим, четвертым входами - с выходами блока регистров, пятым входом - с выходом третьего реверсивного счетчика.
Фил.3
| Авторское свидетельство СССР № 442637, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
