СЛ
с:
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обработки изображений | 1985 |
|
SU1309044A1 |
| Оптический проблесковый сигнализатор | 1986 |
|
SU1338674A1 |
| СИСТЕМА АСТРООРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1989 |
|
SU1795708A1 |
| Устройство для сопряжения процессора с внешними устройствами | 1990 |
|
SU1839253A1 |
| Способ многоканального аналого-цифрового преобразования и многоканальный аналого-цифровой преобразователь | 1986 |
|
SU1451858A1 |
| Конвейерное буферное запоминающее устройство для систем обработки изображений | 1989 |
|
SU1751769A1 |
| Буферное запоминающее устройство с произвольной выборкой двумерного фрагмента | 1986 |
|
SU1444784A1 |
| Счетчик фотонов | 1983 |
|
SU1078259A1 |
| Устройство для счета фотонов | 1983 |
|
SU1130746A1 |
| ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 1992 |
|
RU2069308C1 |
Изобретение относится к сиаемам ориентирования движущихся объектов в пространстве и жет быть использовано в навигационных устроЯ- авах проводки судоа Цель изобретения - лсзы-- шение точноаи в навигационных устройствах проводки судоа Цель изобретения - повышение TOIH- ности ориентирования движущегося по воде объекта Оптический проблесковый синализатор содержит два одинаковых оптических передатчика 1 и 2. уаановленных на берегу и вращающих лучи в плоскости XOY, и уаановленное на борту движе- щегося объекта 3 приемное региарир ощее уа- ройство, содержащее фотоприемный блок, который принимает оптическое передатчиков 1 и 2, преобразовывает его в электрические сигналы, пропорциональные углам а и Э, и выдает информацию на мультиплексор, куда посгупаюти числовые значения конаант U е, у.р, а блок вычисления ко- орддаат по программа ., хранящимся в постоянном запоминающем устройстве, производит вычисление параметров X, Y. V. 0. которые через адреснуо шину 15ыеодятся на блок индикации. Для быародвижу- щихся объектов используются два фотоприемных блока, направленные соответственно на передатчики 1 и 2, что поззоляет одновременно измерять углы а и 3. 2 злфчнЗ ия
СП
00
Изобретение относится к системам ориентирования движущихся объектов в пространстве и может быть использовано в навигационных устройствах проводки судов.5
Целью изобретений является повышение точности ориентирования движущегося по воде объекта,.
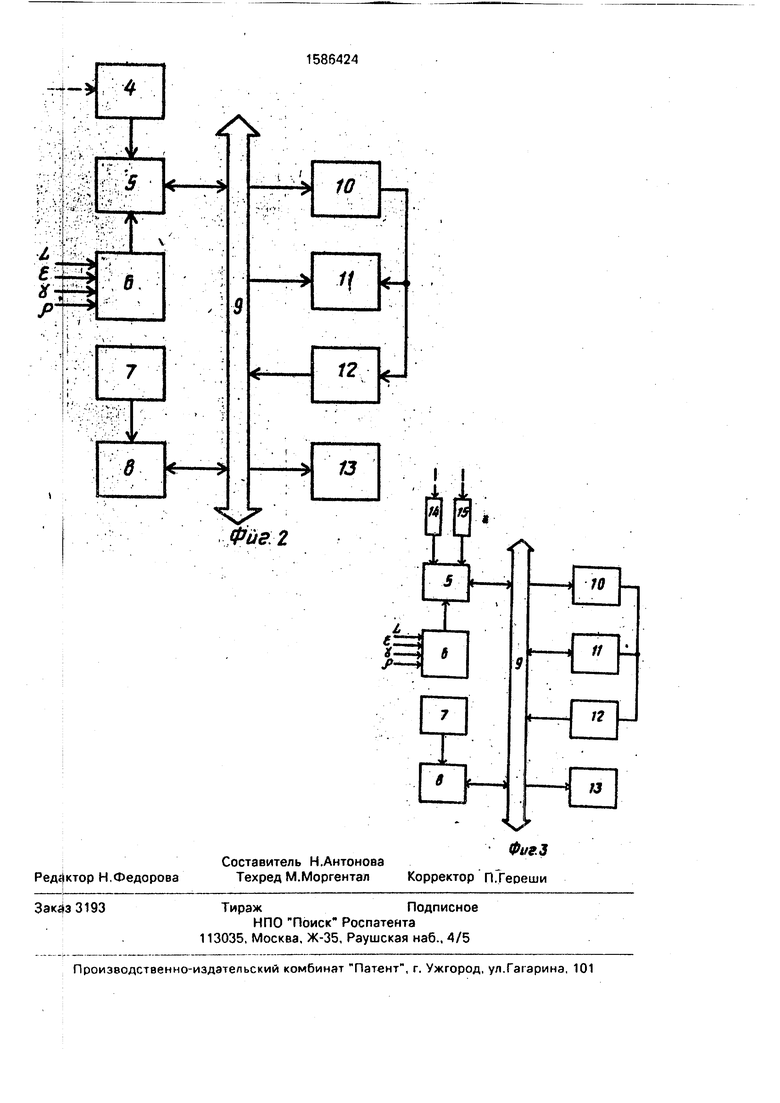
На фиг. 1 показана схема решения навигационной задачи; на фиг. 2 - функцио- О нальная схема приемного регистрирующего устройства с одним фотоприемником, на фиг. 3 - функциональная схема приемного регистрирующего устройства с двумя фотоприемниками.15
Оптический проблесковый сигнализатор содержит два одинаковых оптических передатчика 1 и 2, которые расположены на берегу э известных точках декартовой системы координат XOY (см. фиг. 1) на рассто- 20 янии L друг от друга, а по оси вращения передатчиков расположены перпендику- лярно плоскости XOY. Ось вращения передатчика 1 совмещена с началом декартовой системы координат XOY. положение оси 25 вращения передатчика 1, соответствующее измеряемому углу о О, находится относительно оси ОХ под углом е, положение оси вращения передатчика 2, соответствующее измеряемому углу 0, находится относи- 30 тельно оси ОХ под углом у. Угол между осью ОХ и прямой L составляет р .На борту движущегося объекта 3 (см. фиг. 2) расположено приемное регистрирующее устройство, со держащее фотоприемный блок 4, выход ко- 35 торого связан с первым входом мультиплексора 5, блок 6 ввода констант, выход которого связан с третьим входом мультиплексора 5, генератор 7 тактовой ча- стоты. выход КОТОРОГО связан с бходом бло- ка 8 вычисления координат. Выход через адресную шину 9 связан с четвертым вхо- дом мультиплексора 5, с входом регистра 10 адреса, с первыми входами оперативного запоминающего устройства 11 и постоянно- 5 го запоминающего устройства 12 блока 13 индикации, выход регистра 10 адреса связан с вторыми входами оперативного запоминающего устройства 11 и постоянного запоминающего устройства 12. Приемное регистрирующее устройство, расположен- нее на борту объекта 3. движущегося с большой скоростью (см. фит-. 3). содержит два фотоприемных блока 14 и 15. входы каждого из которых оптически связаны со своим пе- 5 редатчиком. а выходы - с первым и вторым входами мультиплексора 5.
Исходные уравнения для вычисления координат X и Y движущегося объекта 3
находятся в результате решения треугольника по теореме синусов в декартовой системе координат.
-(а.): (1) V-L,.sHa+.,.,2,
где L - расстояние между осями вращения пepeдaWикoв 1 и 2;
угол между прямой L и осью 0-Х;
а- угловое положение объекта 3, определяемое передатчиком 1;
ft- углрвое положение объекта 3, определяемое передатчиком 2;
у- угол между осью 0-Х и линией, соответствующей положению/3 0;
е- угол между осью 0-Х и линией соответствующей положению 0 0.г
Скорость V движения и угловое направление в движения относительно оси 0-Х объекта 3 вычисляют по формуле
у .+СЛУ:.
At
(3)
AW
. 0 arctg-55 ,(4)
где ДХ и Д Y - разности отсчетов координат;
АХ Хп - Хп-1; AY-Yn-YnH.
Программа вычисления значений X, Y, V, в .в соответствии с формулами 1-4 записана в постоянном запоминающем устройстве 12 при изготовлении приемного регистрирующего устройства.
Оптический проблесковый сигнализатор работает следующим образом.
Оптические передатчики 1 и 2, установленные на берегу, вращают лучи в плоскости XOY (см. фиг. 1 и 2). Фотоприемный блок 4, направленный на передатчик 1, принимает его оптическое излучение, преобразовывает в злектрический сигнал, пропорциональный углу а , и выдает информацию на первый вход мультиплексора 5. Далее фотоприемный блок 4 направляется на передатчик 2, принимает его оптическое излучение, преобразовывает в злектрический сигнал, пропорциональный углу Д и выдает информацию на первый вход мультиплексора 5. После включения питания в приемном регистрирующем устройстве управляющие импульсы с выхода генератора 7 тактовой частоты поступают на вход блока 8 вычисления координат, который передает через адресную шину 9 обращение к постоянному запоминающему устройств/ 12, где хранятся программы вычисления параметров X, Y, V, О, программа переписи содержимого постоянного запоминающего устройства 12 в оперативное запоминающее устройство 11 и адреса обращения, Через адресную шину 9 адреса обращений переписываются в регистр 10 адреса, а программа вычисления параметровX.Y.V.e переписывается в оперативное запоминающее устройство 11, По окончании переписи управление передается программе, хранящейся в оперативном запоминающем устройстве 11, Начинается выполнение программы ввода констант. Оператор на наборном поле блока 6 ввода констант задает числовые значения констант L. е, у,/о, которые поступают на третий вход мультиплексора 5, Блок 8 вычисления координат через адресную шину 9 считывает данные о константах с четвертого входа мультиплексора 5 и через регистр 10 адреса помещает их в определенные ячейки оперативного запоминающего устройства 11, По- еле ввода констант блок 8 вычисления координат аналогичным образом считывает данные углов а и 8 и производит расчет значений X. Y, V, 9 в соответствии с формулами 1-4, Результаты расчета блок 8 вычис-
Форму л а изобретения
ОПТИЧЕСКИЙ ПРОБЛЕСКОВЫЙ СИГ- НАЛИЗАТОР по авт, ев, N 1338674, отлича- 30 ющийея тем, что. е целью повышения точ- ноети ориентирования движущегося по воде объекта, в него введены второй опти- чеекий передатчик, установленный на расстоянии от первого оптического 35 передатчика, и установленные на движущемся объекте последовательно соединенные блок ввода констант и мультиплексор, второй вход которого соединен с фотоприемным блокЬм, последовательно соединен- 0 ные генератор тактовой частоты и блок вычисления координат, а также регистр адреса, оперативное и постоянное запоминающие устройства и блок индикации, при этом выход блока вычисления координат 5 через адресную шину соединен с третьим
ления координат через адресную шину 9 выводит на блок 13 индикации.
Оптический проблесковый сигнализатор для быстродвижущихся объектов работает следующим образом.
Передатчики 1 и 2. установленные не берегу, вращают лучи в плоскости XOY (см. фиг, 1 и 3). Фотоприемный блок 14 направлен на передатчик 1, принимает его оптическое излучение, преобразовывает в электрический сигнал, пропорциональный углу а, и выдает эту информацию на первый вход мультиплексора 5. Фотоприемный боок Т5 направлен на передатчик 2, принимает его оптическое излучение, преобразо- вывает в электрический сигнал, пропорциональный углу, и выдает эту информацию йа второй вход мультиплексора 5. Таким образом, измерение углов а л происходит одновременно, что позволяет измерять параметры движения объекта с высокой точностью.
(56) Авторе кое, свидетельство СССР rvfe 1338674, кл. G 08 В 5/38. 1986,
входом мулътиплекеора. е входом регистра адреса и первыми входами оперативного и постоянного запоминающих уетройств и входом блока индикации, выход регистра адреса соединен с вторыми входами оперативного и постоянного запоминающих устройств,
2,Сигнализатор по п,1, отличающийся тем. что фотоприемный блок установлен с возможностью вращения в горизонтальной плоскости,
3,Сигнализатор по п.1, отличающийся тем. что. е целью повышения точности ориентирования быстродвижущегося объекта, фотоприемный блок выполнен двухплоща- дочным. причем площадки фотоприемного блока оптически сопряжены соответственно с первым и вторым оптическими передатчиками.
Редактор Н.Федорова
ФигЗ
Составитель Н.Антонова Техред М.Моргентап Корректор П.Гереши
