сд
00 О5
со ел
4;:
Изобретение относится к системам для изменения гидродинамических характеристик корпуса судна, а именно ходкостк, за счет изменения дифферента судна.
Целью изобретения является повышение точности и достоверности.
На фиг. 1 изображена блок-схема системы определения дифферента судна; на фиг. 2 - участки ходовых характеристик судна с главным дизельным двигателем. Система определения дифферента содер- жит датчик 1 дифферента судна, выход ко- торого подключен к входу первого ключа 2, датчик 3 частоты вращения вала двигате ля, ВЫХОДОМ подключенный к входу второго ключа 4, датчик 5 перемещения топливной рейки, выход которого подключен к входу третьего ключа 6. Второй вход первого ключа 2 соединен с выходом генератора 7 синхроимпульсов. Этот же выход соединен с первыми входами первого 8 и второго 9 элементов И, выходы которых соединены с другими входами второго 4 и третьего 6 ключей соответственно, причем второй вход первого элемента И 8 соединен с первым выходом блока 10 задания режима работы системы, а второй вход второго элемента И 9 соединен с вторым выходом блока 10 задания режима работы системы.
Выход первого ключа 2 соединен с первым входом блока 11 формирования функции, второй вход которого соединен с выходами второго 4 и третьего 6 ключей, выход блока 11 формирования функции через блок 12 формирования производной и блок 13 решения уравнения соединен с входом блока 14 управления дифферентованием, с выходов которого управляюш,ие сигналы поступают на электродвигатель 15 балластного насоса и реле 16 задержки времени. Выход реле 16 задержки времени соединен с входом генератора 7 синхроимпульсов.
Изменение дифферента судна изменяет сопротивление движению судна, соответственно при этом меняется режим работы про- пульсивного комплекса. Если двигатель оснащен предельным регулятором частоты вращения вала, то для поддег жания постоянной топливоподачн (S const) при изменении дифферента изменяется ч.астота вращения вала п. Если двигатель оснащен всережимным регулятором частоты врац.1,е- ния вала, то при изменении сопротив.чения движению судна регулятор обеспр п;чает постоянную частоту вращению ка,,1 (. const) путем изменения подачи Ti-,i;, ii в двигатель через орган управления ic;;; ih воподачей. Выбор оптимального дифферента заключается в поиске такого его значения, при котором величина изменяемого параметра (п или S - в зависимости от способа управления двигателем) достигает экстремума. Так при способе управления двигателем с помощью предельного регулятора условие оптимума дифферента наступает при п
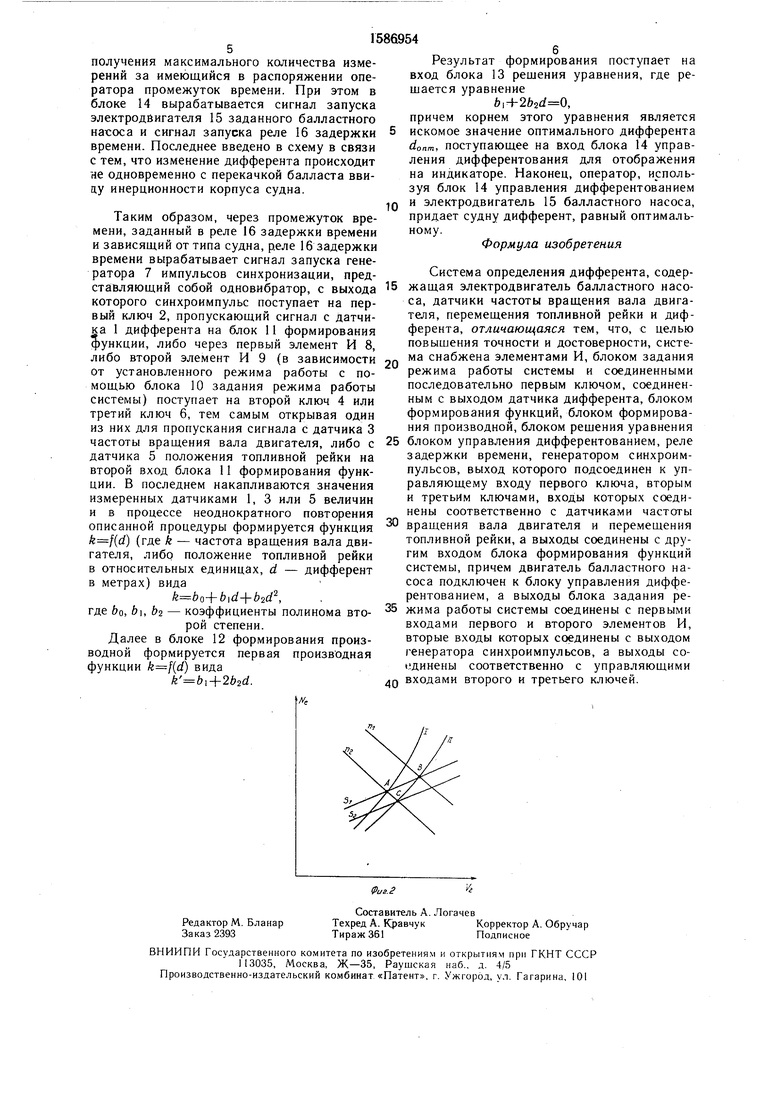
тах, при способе управления двигателем с помощью всережимного регулятора аналогичное условие наступает при . Это можно проиллюстрировать на при- мере ходовых характеристик судна с главным дизельным двигателем (фиг. 2), где изображены, участки этих характеристик (I и II) в координатах мощность двигателя Ne - скорость судна Vs. Кривыми п и S показаны линии равных значений частоты вращения вала (п) к положения органа управления топливоподачей (топливной рейки) двигателя (5). Кривая I изображает характеристику при неоптимальном дифференте, кривая П - после оптимизации дифферента.
5 При этом и . Точка А на кривой I характеризует равновесный режим работы пропульсивного комплекса до оптимизации дифферента. Оптимизация дифферента смещает характеристику вправо (облегчает) до кривой II. При этом перемещение харак теристики может происходить от точки А до точки В - при способе управления двигателем с помощью предельного регулятора (5 const), частота вращения повыщается от «2 до П, достигая при этом максимально
5 возможной величины из всех замеряемых значений. Перемещение ходовой характеристики может также происходить от точки А до точки С - при способе управления двигателем с помощью всережимного регулятора (rt const), положение топливной рейки
0 при этом уменьшается от Si до S2, достигая минимально возможной из всех замеренных значений.
Таким образом, определять оптимальный дифферент судна можно, замеряя п (при S const) или S (при n con5t) в-процессе
5 изменения ходового дифферента судна и нахождения экстремума функции (d) или (d).
Система работает следующим образом. На ходу судна на тихой воде или при не- Р1 значительном волнении оператор, используя блок ГО задания режима работы системы, задает один из двух режимов работы системы в зависимости от способа управления двигателем (при фиксированной частоте вращения вала двигателя или при фиксиро5 ванном положении топливной рейки), подготавливая тем самым первый элемент И 8 либо второй элемент И 9 к пропусканию импульса синхронизации от генератора синхро- iiMHV. ibCGti 7 на второй к, 1юч 4 либо на третий к.:;.-о ; 6 спотве 1 ственно. Блок 10 задания ре0 жимов работы системы содержит двухпози- ниоиный переключате.;1ь и индикаторы режима работы.
Далее с помои1,ью блока 14 управления дифшороп гованием, представляющего собой набор - ;;лчкаторов и пускателей электро5 двигатс-; -; С з,мастных насосов, оператор произво;; . : um) изменений дифферента судна на :: --(иу, определенную для каждого ТИ1П1 ;, ,м i опытным путем из расчета
получения максимального количества измерений за имеющийся в распоряжении оператора промежуток времени. При этом в блоке 14 вырабатывается сигнал запуска электродвигателя 15 заданного балластного нах;оса и сигнал запуска реле 16 задержки времени. Последнее введено в схему в связи с тем, что изменение дифферента происходит не одновременно с перекачкой балласта вви- цу инерционности корпуса судна.
Таким образом, через промежуток времени, заданный в реле 16 задержки времени и зависящий от типа судна, реле 16 задержки времени вырабатывает сигнал запуска генератора 7 импульсов синхронизации, представляющий собой одновибратор, с выхода которого синхроимпульс поступает на первый ключ 2, пропускающий сигнал с датчика 1 дифферента на блок 11 формирования функции, либо через первый элемент И 8, либо второй элемент И 9 (в зависимости от установленного режима работы с помощью блока 10 задания режима работы системы) поступает на второй ключ 4 или третий ключ 6, тем самым открывая один из них для пропускания сигнала с датчика 3 частоты вращения вала двигателя, либо с датчика 5 положения топливной рейки на второй вход блока 11 формирования функции. В последнем накапливаются значения измеренных датчиками 1, 3 или 5 величин и в процессе неоднократного повторения описанной процедуры формируется функция (d) (где k - частота вращения вала двигателя, либо положение топливной рейки в относительных единицах, d - дифферент в метрах) вида
k bo+btd+b2d
где bo, Ь, bz - коэффициенты полинома второй степени.
Далее в блоке 12 формирования производной формируется первая производная функции (d) вида
k bi+2b2d.
Результат формирования поступает на вход блока 13 решения уравнения, где ре- щается уравнение
fe,-|-2M 0,
причем корнем этого уравнения является искомое значение оптимального дифферента donm, поступающее на вход блока 14 управления дифферентования для отображения на индикаторе. Наконец, оператор, используя блок 14 управления дифферентованием и электродвигатель 15 балластного насоса, придает судну дифферент, равный оптимальному.
Формула изобретения
20
Система определения дифферента, содержащая электродвигатель балластного насоса, датчики частоты вращения вала двигателя, перемещения топливной рейки и дифферента, отличающаяся тем, что, с целью повышения точности и достоверности, система снабжена элементами И, блоком задания режима работы системы и соединенными последовательно первым ключом, соединенным с выходом датчика дифферента, блоком формирования функций, блоком формирования производной, блоком рещения уравнения
25 блоком управления дифферентованием, реле задержки времени, генератором синхроимпульсов, выход которого подсоединен к управляющему входу первого ключа, вторым и третьим ключами, входы которых соединены соответственно с датчиками частоты
30 вращения вала двигателя и перемещения топливной рейки, а выходы соединены с другим входом блока формирования функций системы, причем двигатель балластного насоса подключен к блоку управления дифферентованием, а выходы блока задания ре35 жима работы системы соединены с первыми входами первого и второго элементов И, вторые входы которых соединены с выходом генератора синхроимпульсов, а выходы соединены соответственно с управляющими входами второго и третьего ключей.
40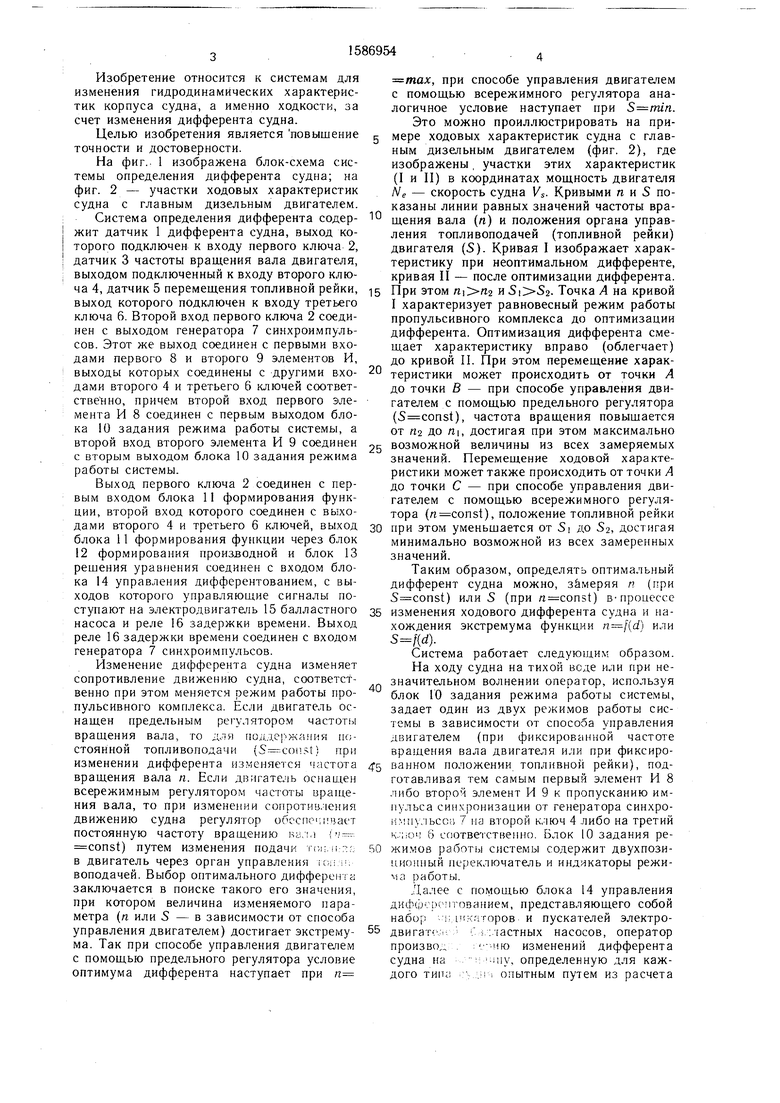
| название | год | авторы | номер документа |
|---|---|---|---|
| Система определения метацентрической высоты судна | 1987 |
|
SU1586953A1 |
| УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2006 |
|
RU2312789C1 |
| Система для контроля мореходных характеристик судна | 1983 |
|
SU1219446A1 |
| Система определения метацентрической высоты судна | 1986 |
|
SU1560449A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2571693C1 |
| Система управления накаткой судов | 1970 |
|
SU727514A1 |
| Устройство для калибровки вентильного электродвигателя | 1987 |
|
SU1417155A1 |
| Система автоматического управления режимами работы уборочной машины | 1983 |
|
SU1281197A1 |
| Система управления доковыми операциями | 1984 |
|
SU1257617A1 |
| ЛЕДОКОЛЬНАЯ СИСТЕМА ДЛЯ ПЛАВАЮЩИХ ТЕЛ | 2009 |
|
RU2483967C2 |
Изобретение относится к системам для измерения гидродинамических характеристик судна, а именно ходкости, за счет измерения дифферента судна. Цель изобретения - повышение точности и достоверности определения. Система содержит датчик 3 частоты вращения вала двигателя, датчик 5 перемещения топливной рейки и датчик 1 дифферента, последовательно соединенные первый ключ 2, блок 11 формирования функции, блок 12 формирования производной, блок 13 решения уравнения, блок 14 управления дифферентованием, реле 16 задержки времени, генератор 7 синхроимпульсов, выход которого подключен к управляющему входу первого ключа 2
второй 4 и третий 6 ключи, входы которых соединены соотвественно с датчиками 3 и 5, а выходы - с другим входом блока 11 формирования функции, первый 8 и второй 9 элементы И, блок 10 задания режима работы системы и электродвигатель 15 балластного насоса, который подключен к блоку 14 управления дифферентованием. Выходы блока 10 задания режима работы системы соединены с первыми входами первого 8 и второго 9 элементов И, вторые входы которых соединены с выходом генератора 7 синхроимпульсов, а выходы - с управляющими входами второго 4 и третьего 6 ключей соответственно. 2 ил.
| Проспект фирмы Dynamic | |||
| Kontram | |||
| Fairlay Int | |||
| «Shipp Weeply, 1982, 283, № 5166, 34. |
