Изобретение относится к области судостроения, в частности к системам управления движением судна.
Известны системы динамического позиционирования судна (А.С. СССР 1615678), стабилизирующие положение надводного либо подводного судна в пространстве. Известно также устройство управления движением судна (патент России № 2238881 - прототип), содержащее задатчик угла дифферента, датчик угла дифферента, датчик угловой скорости, датчик положения руля, выходы которых подключены к первому, второму, третьему и четвертому входам суммирующего усилителя, выход которого соединен с входом рулевого привода; командный блок, программный блок и балластную цистерну к входу которой подключен выход программного блока, к входу последнего подключен командный блок. Устройство поддерживает заданное состояние (движение судна в пространстве) при появлении достаточно сильных возмущающих воздействий (сброс трала, геодезического буя, ложной цели и т.д.) с использованием в качестве исполнительных средств кроме гидродинамических рулей балластных цистерн.
Недостатком рассмотренных выше устройств является невозможность обеспечить требуемую точность стабилизации судна при появлении сильного возмущающего воздействия (величина которого заранее известна так же, как и время воздействия). Это объясняется тем, что:
- использование закона замкнутого управления по текущим параметрам движущегося судна гидродинамическими исполнительными средствами (рулями) не позволяет использовать в самом начале процесса сброса всю возможную эффективность этих средств,
- использование разомкнутого программного управления по временной программе оказывается малопригодной при длительном времени работы из-за накопления несоответствия между принятой моделью процесса при сбрасывании спецобъектов и реально протекающим процессом стабилизации судна (наличие помех, накапливаемых во времени).
Целью предлагаемого изобретения является создание устройства, обеспечивающего заданную точность стабилизации судна при появлении сильных возмущений, величина которых и время действия заранее известны, т.е. исключения отмеченных выше двух недостатков.
Поставленная цель достигается тем, что устройство программного управления движением судна содержит по сравнению с прототипом дополнительно блок переключения.
Устройство программного управления движением судна содержит датчик угла дифферента, задатчик угла дифферента, датчик угловой скорости, суммирующий усилитель, рулевой привод, командный блок, программный блок. Дополнительно введен блок переключения, выход которого подключен к входу рулевого привода. Первый, второй и третий входы блока переключения соединены соответственно с выходом суммирующего усилителя, первым выходом командного блока и выходом программного блока, вход которого соединен со вторым выходом командного блока, первый и второй входы которого соединены соответственно с выходом датчика угла дифферента и выходом датчика угловой скорости. Выходы датчика угла дифферента, задатчика угла дифферента и датчика угловой скорости подключены соответственно к первому, второму и третьему входам суммирующего усилителя. При этом блок переключения содержит электромагнитное реле с переключающей контактной группой, нормально разомкнутые контакты которой включены между первым входом блока переключения и его выходом, нормально замкнутые контакты - между третьим входом блока переключения и его выходом, а обмотка управления электромагнитного реле включена между вторым входом блока переключения и общей шиной.
В устройстве принят в начале процесса стабилизации закон разомкнутого программного управления по времени исполнительными средствами с переходом на закон замкнутого управления по углу дифферента и угловой скорости после вхождения судна в область допустимого состояния по углу дифферента.
На чертеже приведена блок-схема предлагаемого устройства.
Устройство управления движением судна содержит датчик угла дифферента 1, задатчик угла дифферента 2, датчик угловой скорости 3, суммирующий усилитель 4, рулевой привод 5, командный блок 6, программный блок 7, блок переключения 8, судно 9.
В качестве датчика 1, задатчика угла дифферента 2 могут использоваться серийно выпускаемые измерители угла с точностью не ниже 5%. Датчик угловой скорости 3 типовой ДУС-5 с диапазоном измерения 0.05-1.5 г/сек. Суммирующий усилитель 4 может быть реализован на операционном усилителе типа 140 УД-6. Рулевой привод 5 - штатный гидравлический, электрогидравлический или электрический. Командный блок 6 реализуется на серийно выпускаемых логических элементах. Для формирования компаратора и электронных переключателей для включения программного блока 7, который может быть реализован в виде кулачкового формирователя для задания величины управляющего воздействия в функции времени. Блок переключения 8 может быть реализован на электромагнитном реле с контактной группой на размыкание и замыкание. Перечисленные выше блоки системы соединены между собой в соответствии с приведенной блок-схемой.
(Другой возможный вариант реализации предложенного устройства при использовании цифровой вычислительной техники - это микроконтроллер, в котором будут реализованы два закона стабилизации корабля, переключение которых производится по следующим логическим условиям:
σ=δзд.f(ti) при (T0<ti) и f1(ψ, d/t ψ)>f(ψдопустим.),
σ=δзд.f(ψ, d/t ψ) при (Tконеч.<ti) и f1(ψ, d/t ψ)≤f(ψдопустим.),
где
σ - закон управления исполнительными средствами корабля,
δзд.f(ti) - задающее воздействие исполнительным органам в функции времени (разомкнутое программное временное управление),
T0=(Tпуска изд.-▿ tjопережение по времени включения) - момент времени включения программного управления,
ti - текущее время,
δзд.f(ψ, d/t ψ) - задающее воздействие исполнительным органам при замкнутом законе управления в функции угла дифферента (ψ) и скорости его изменения (d/t ψ),
f1 (ψ, d/t ψ) - функция текущего угла дифферента и угловой скорости, используемая для формирования условия перевода закона программного управления на закон замкнутого управления исполнительными средствами,
Тконеч. - минимальное расчетное время выключения программного управления)
Описание работы устройства.
Устройство программного управления движением судна позволяет стабилизировать судно по углу дифферента с малыми ошибками при задании на судно больших возмущений от сбрасывания специальных объектов (тралов, геодезических буев, ложных целей и др.). Это достигается программным по времени управлением исполнительными средствами на начальном этапе процесса. Судоводитель с командного блока 6 подает сигнал на включение программного блока 7. В соответствии с заданной судоводителем программой в блоке 7 сигнал заданной величины управляющего воздействия в функции времени поступает через нормально замкнутый контакт блока переключения 8 на вход рулевого привода 5:
δзд.=Cf(ti) при (T0<ti) и f1(ψ, d/t ψ)>f(ψдопустим.)
(Обозначения переменных приведены выше).
(Программа составлена с учетом возможности включения исполнительных воздействий до момента времени сбрасывания спецобъекта). Разомкнутое программное по времени управление исполнительными средствами постепенно приводит судно в область допустимого состояния судна по углу дифферента и угловой скорости.
В момент времени вхождения судна в допустимую область отклонений судна по углу дифферента и угловой скорости происходит переход с программно-разомкнутого временного управления на закон замкнутого управления судном по углу дифферента. Эта команда вырабатывается в командном блоке 6 путем сравнения текущих значений угла дифферента и угловой скорости (последние поступают с датчика угла дифферента 1 и датчика угловой скорости 3) с заранее заданными значениями угла и скорости дифферента (соответствующие заданной также в блоке 6 допустимой области состояния судна по этим координатам). При равенстве этих сигналов выработанный в компараторе блока 6 сигнал на переключение закона управления поступает на вход обмотки управления электромагнитного реле блока 8. Происходят срабатывание электромагнитного реле и подключение входа рулевого привода 5 к выходу суммирующего усилителя 4, на выходе которого формируется задание для управления рулевым приводом по закону замкнутого управления
δзд.=K1Ψ+K2d/dtΨ,
где
Ψ=(Ψтекущее-Ψзаданное) - отклонение угла дифферента,
d/dt Ψ - скорость изменения угла дифферента,
Ki - коэффициенты регулирования.
Проведенное моделирование предложенного гибридного программного управления подтвердило высокую эффективность в режиме стабилизации судна при сбрасывании спецобъектов. (Отклонение судна по углу дифферента в процессе сбрасывания спецобъекта при использовании предложенного устройства снизилось на 32%).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2006 |
|
RU2306239C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2238881C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СУДНОМ С ДИАГНОСТИКОЙ | 2004 |
|
RU2267440C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СУДНА | 2000 |
|
RU2171204C1 |
| УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ БУДУЩЕГО СОСТОЯНИЯ КОРАБЛЯ | 2001 |
|
RU2189624C1 |
| АППАРАТУРА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ ПРИ ВОЛНЕНИИ | 2009 |
|
RU2392181C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ ПРИ РАЗВИТОМ МОРСКОМ ВОЛНЕНИИ | 2008 |
|
RU2368536C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2133491C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2006 |
|
RU2319641C1 |
| СПОСОБ ОТКАЗОУСТОЙЧИВОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ ПО ГЛУБИНЕ | 2012 |
|
RU2513157C1 |
Изобретение относится к области судостроения, в частности к системам управления движением судна. Устройство содержит датчик угла дифферента, задатчик угла дифферента, датчик угловой скорости, суммирующий усилитель, рулевой привод, командный блок и программный блок, выходы датчика угла дифферента, задатчика угла дифферента и датчика угловой скорости подключены соответственно к первому, второму и третьему входам суммирующего усилителя. Устройство также дополнительно содержит блок переключения, первый, второй и третий входы которого соединены соответственно с выходом суммирующего усилителя, первым выходом командного блока и выходом программного блока, вход которого соединен со вторым выходом командного блока, первый и второй входы которого соответственно соединены с выходом датчика угла дифферента и выходом датчика угловой скорости, выход блока переключения соединен с входом рулевого привода. Достигается повышение точности стабилизации судна в процессе сбрасывания специальных объектов. 1 з.п. ф-лы, 1 ил.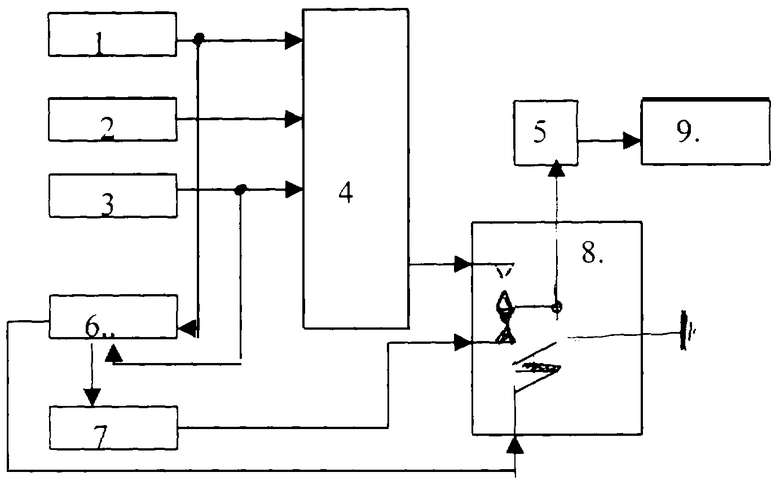
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2238881C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2133491C1 |
| US 4388889 А, 21.06.1983. | |||

