Изобретение относится к судостро е нию, а именно к автоматизированным системам управления балластно-зато- пительными системами передаточных и ремонтных плавучих доков, и может быть использовано для автоматизации таких доковых операщш, как погружение, всплытие, накатка судопоезда с берега на док и передача судопоезда с дока на берег при постановке дока на одну береговую опору, пере дача судопоезда с дока на док на плаву.
Целью изобретения является расширение области применения системы за счет обеспечения управлением доковыми операциями доков всех назначений и сокрахцения объема гидротехнических работ по соорунсению подводных опор /.щя передаточных доков.
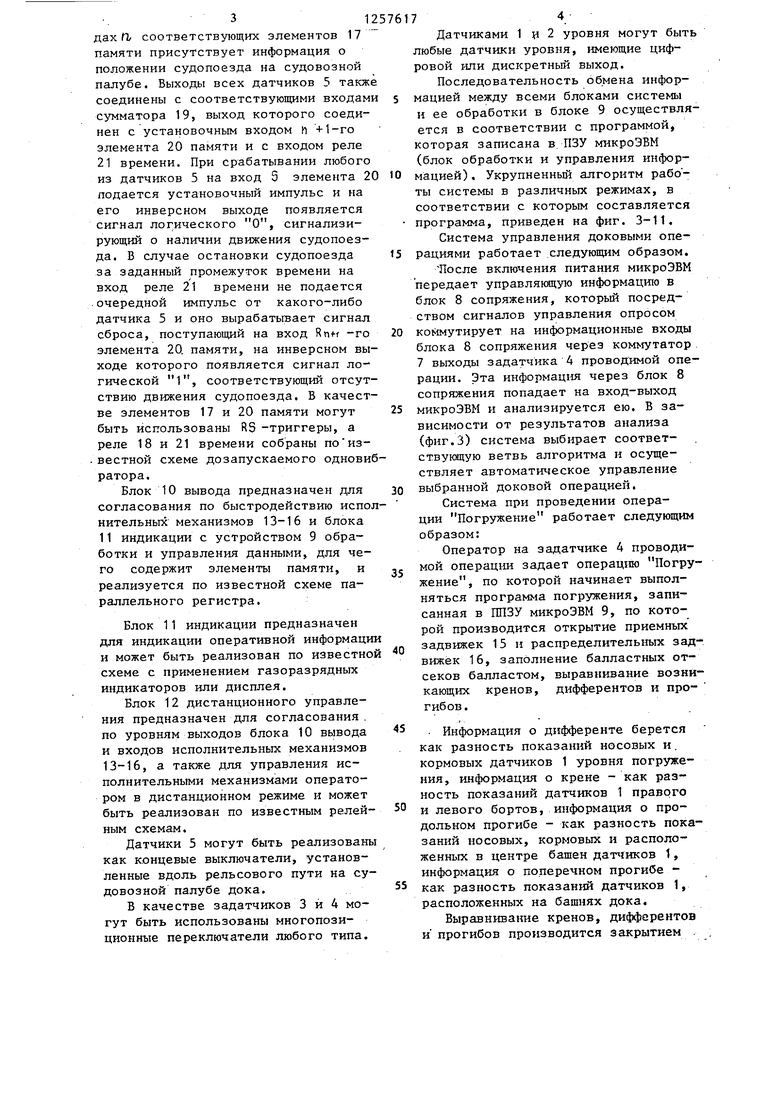
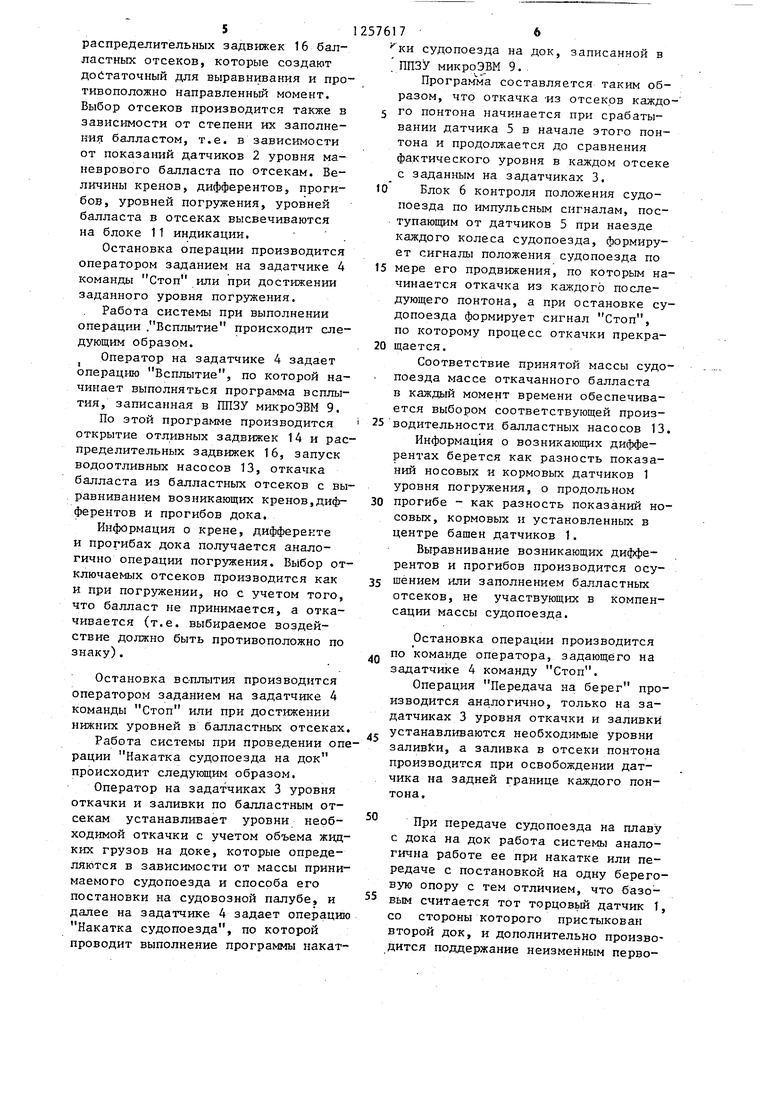
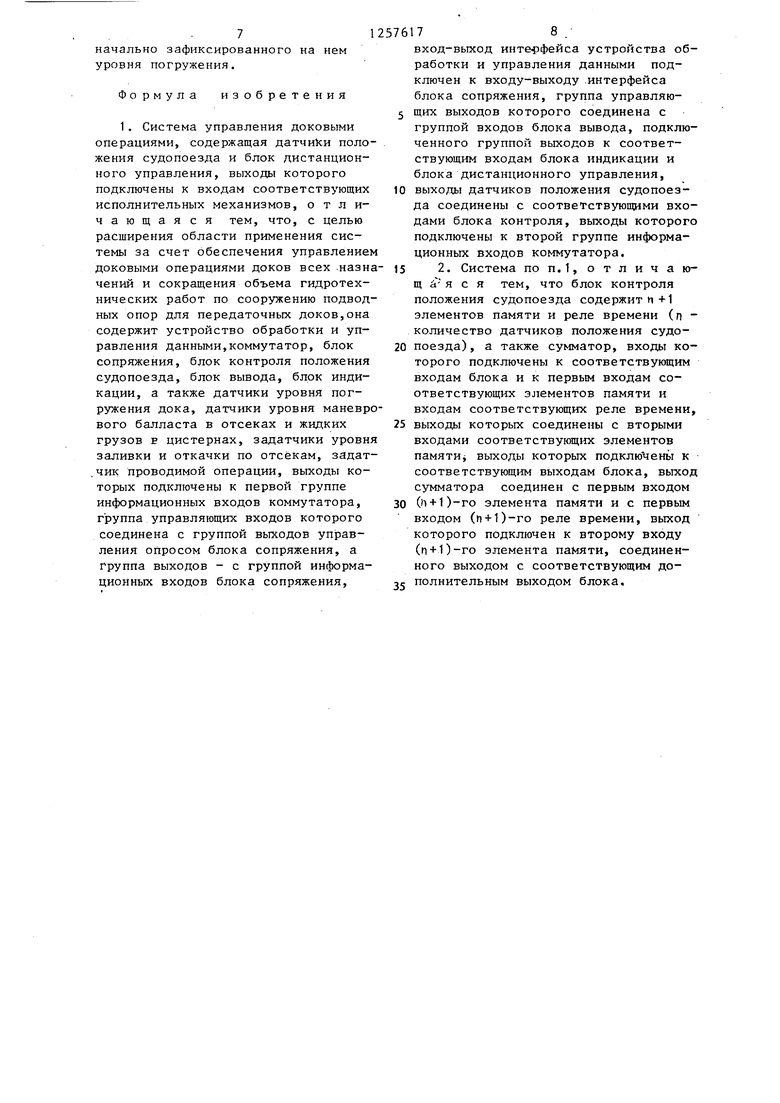
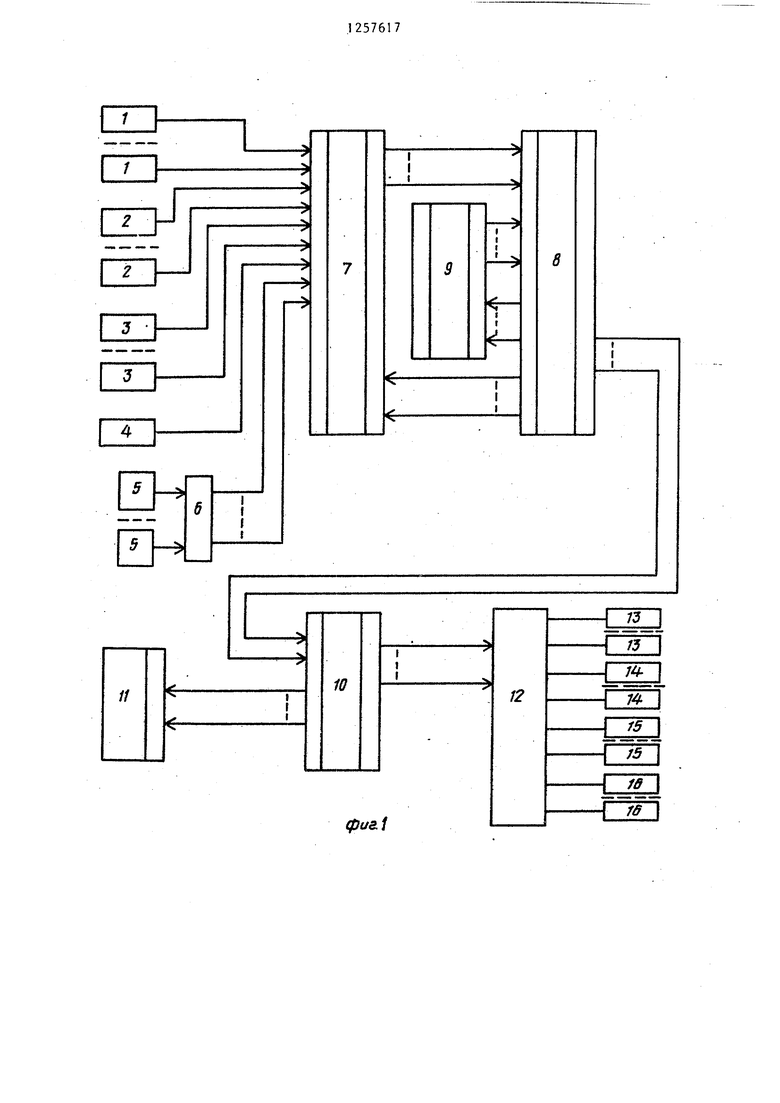
На фиг.1 изображена блок-схема предлагаемой cиcтe ш управления на фиг.2 - функциональная схема блока контроля положения судопоезда на фиг. 3-11 - алгоритмы функционирования системы управления доковыми операциями.
Система управления доковыми операциями содержит датчш и 1 уровня погру/кения дока, датчики 2 уровня маневрового балласта в отсеках и жвдких грузов в цистернах, задатчики 3 уровня заливки и откачки балласта по отсекам, задатчик 4 проводимой операции, датчики 5 положения судо- поезда, блок 6 контроля положения судопоезда, блок 7 коммутации, блок 8 сопряжения, устройство 9 обработки и управления информацией, блок 10 вывода, блок 11 индикации, блок 12 дистанционного управления, водоотливные насосы 13, отливные задвижки 14, приемные з двх-гжки 15 и распределительные задвижки 16.
Устройство. 9 обработки управления данными предназначено для управления коммутатором 7 через блок 8 сопряжения посредством связи управлякщих входов коммутатора 7 с группой выходов управления опросом блока 8 сопряжения, управления выводом информации на блок 12 дистанционного управления и блок 11 индикации через блок 8 сопряжения и блок 10 вывода, обработки информации от задатчика 4 проводимой операции, задатчиков 3 уровня заливки н откачки балласта по отсекам, датчиков 1 уровня погру- хсения дока, датчиков 2 уровня маневрового балласта в отсеках и жидких грузов в цистернах, блока 6 ко 1троля положения судопоезда, выходы которых коммутируются коммутато- ром 7 на информационные входы блока 8 сопряжения и через него на вход- выход блока 9 обработки и управления даннымиi
В качестве устройства обработки и управления данными наиболее рационально использовать микроэвм,например, Электроника бОМ.
Блок 8 сопряжения предназначен . для выработки сигналов управления опросом на основании информации, поступающей через его вход-выход из устройства 9, коммутации входа-выхода устройства 9 со своими информационными входами и выходами, нормали- зации сигналов и синхронизации обмена данными устройством 9 со всеми блоками системы.
Блок 8 может быть реализован по стандартной схеме интерфейса пользо- вателя микроЭВМ Электроника 60М.
Коммутатор 7 предназначен для коммутации выходов датчиков 1 и 2, задатчиков 3 и 4, блока 6 контроля положения судопоезда с информацион- ными входами блока 8 сопряжения.Уп- ,равление коммутацией осуществляется сигналами управления опросом блока 8. Коммутатор 7 может быть реализован по известной схеме. I
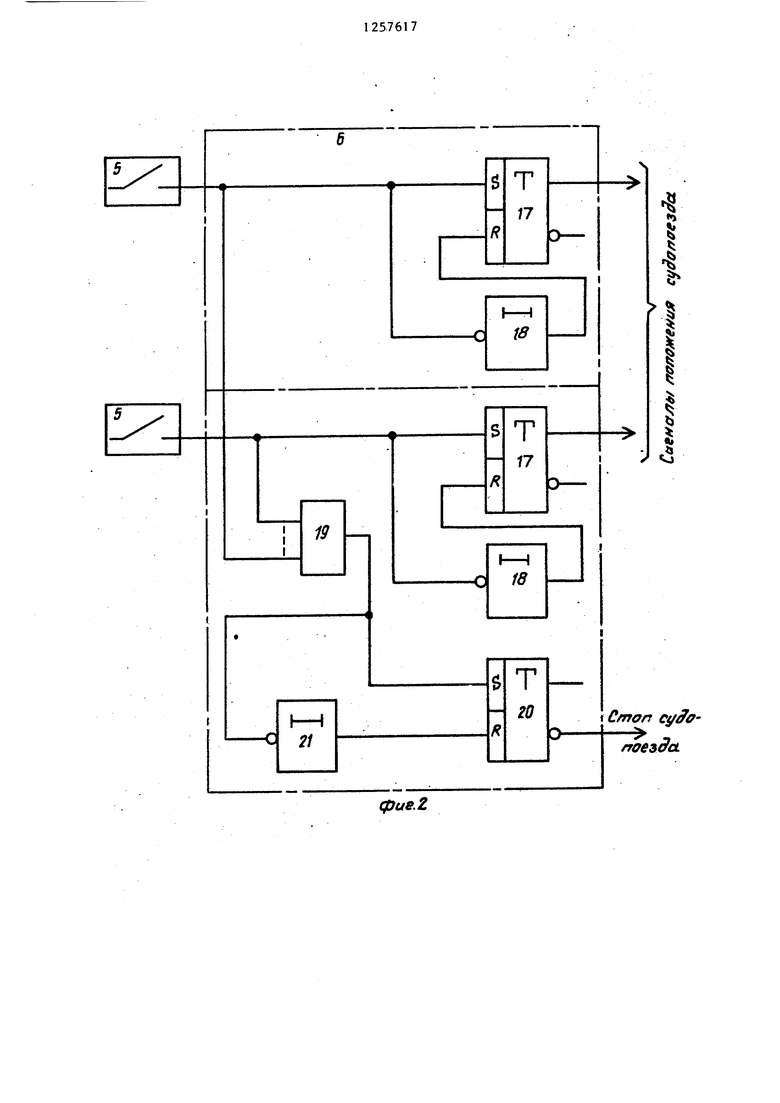
Блок 6 контроля положения судопоезда (фиг.2) предназначен для обработки сигналов от датчиков 5 положения судопоезда и выдаче на входы коммутатора 7 информации о положении судопоезда на судовозной палубе и наличии или отсутствии его движения. При поступлении импульсного сигнала от одного из датчиков 5 соответствующий элемент 17 памяти устанавливается в состояние логической 1, с выхода которого этот сигнал подается на соответствующий выход блока 6. Одновременно сигнал от.датчика 5 поступает на вход реле 18 времени, которое через определенное время,в случае отсутствия очередного импульса от датчика 5, вы- рабатьшает сигнал сброса, поступающий на вход R соответствующего эле - мента 17 памяти и устанавливающий его в состояние логического О.
Дри наличии в системе П датчиков 3 положения судопоезда на выхо
312
дах n/ соответствующих элементов 17 памяти присутствует информация о положении судопоезда на судовозной палубе. Выходы всех датчиков 5 также соединены с соответствующими входами сумматора 19, выход которого соединен с установочным входом h +1-го элемента 20 памяти и с входом реле 21 времени. При срабатывании любого из датчиков 5 на вход 5 элемента 20 подается установочный импульс и на его инверсном выходе появляется сигнал логического О, сигнализирующий о наличии движения судопоезда. В случае остановки судопоезда за заданный промежуток времени на вход реле 21 времени не подается очередной импульс от какого-либо датчика 5 и оно вырабатывает сигнал сброса, поступающий на вход Rntf -го элемента 20. памяти, на инверсном выходе которого появляется сигнал логической 1, соответствующий отсутствию движения судопоезда. В качестве элементов 17 и 20 памяти могут быть использованы RS -триггеры, а реле 18 и 21 времени собраны по известной схеме дозапускаемого одновиб ратора.
Блок 10 вывода предназначен для согласования по быстродействию исполнительных механизмов 13-16 и блока 11 индикации с устройством 9 обработки и управления данными, для чего содержит элементы памяти, и реализуется по известной схеме параллельного регистра.
Блок 11 индикации предназначен для индикации оперативной информации и может быть реализован по известной схеме с применением газоразрядных индикаторов или дисплея.
Блок 12 дистанционного управления предназначен для согласования. по уровням выходов блока 10 вывода и входов исполнительных механизмов 13-16, а также для управления исполнительными механизмами оператором в дистанционном режиме и может быть реализован по известным релей- ным схемам.
Датчики 5 могут быть реализованы как концевые выключатели, установленные вдоль рельсового пути на судовозной палубе дока.
В качестве задатчиков 3 и 4 могут быть использованы многопозиционные переключатели любого типа.
74
Датчиками 1 и 2 уровня могут быт любые датчики уровня, имеющие цифровой или дискретный выход.
Последовательность обмена информацией между всеми блоками системы и ее обработки в блоке 9 осуществляется в соответствии с программой, которая записана в ПЗУ микроЭВМ (блок обработки и управления информацией) , Укрупненный алгоритм рабо - ты системы в различных режимах, в соответствии с которым составляется программа, приведен на фиг. 3-11.
Система управления доковыми операциями работает следующим образом.
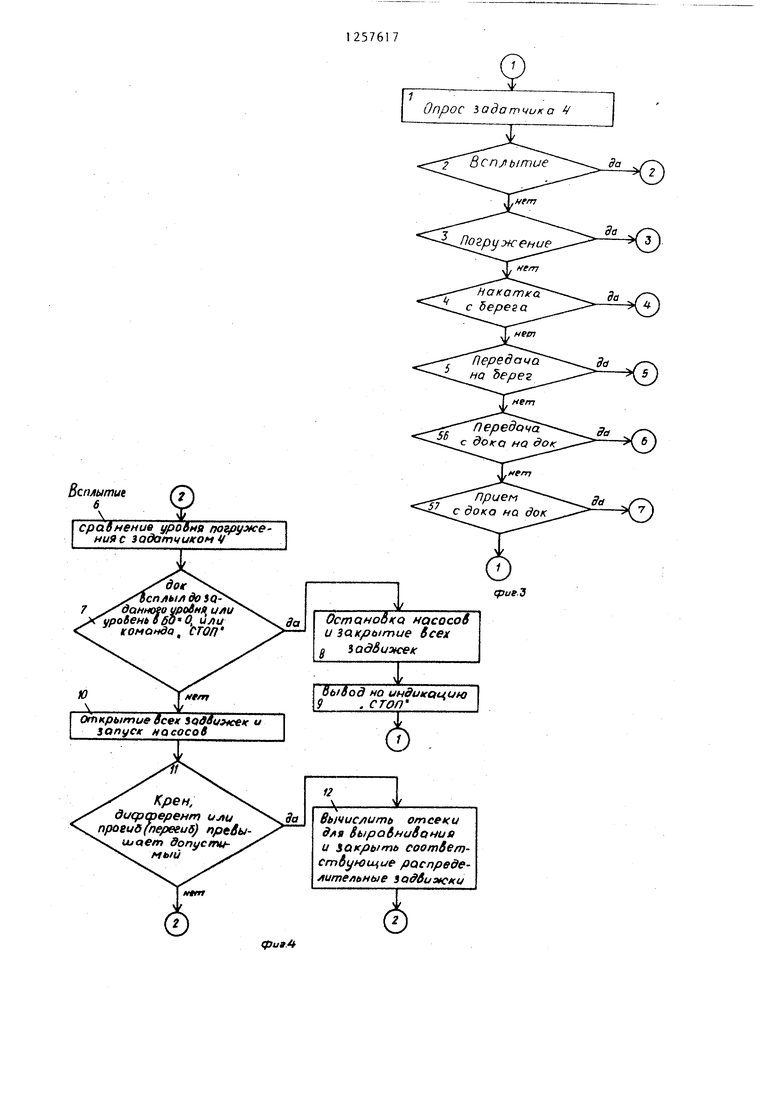
После включения питания микроЭВМ передает управлякядую информацию в блок 8 сопряжения, который посредством сигналов управления опросом коммутирует на информационные входы блока 8 сопряжения через коммутатор 7 выходы задатчика 4 проводимой операции. Эта информация через блок 8 сопряжения попадает на вход-выход микроэвм и анализируется ею. В зависимости от результатов анализа (фиг.З) система выбирает соответ- ствукщую ветвь алгоритма и осуществляет автоматическое управление выбранной доковой операцией.
Система при проведении операции Погружение работает следующим образом:
Оператор на задатчике 4 проводимой операц1ш задает операцию Погружение, по которой начинает выполняться программа погружения, записанная в ППЗУ микроэвм 9, по которой производится открытие приемных задвижек 15 и распределительных задвижек 16, заполнение балластных отсеков балластом, выравнивание возникающих кренов, дифферентов и прогибов.
Информация о дифференте берется как разность показаний носовых и. кормовых датчиков 1 уровня погружения, информация о крене - как разность показаний датчиков 1 правого и левого бортов, информация о продольном прогибе - как разность показаний носовых, кормовых и расположенных в центре башен 1, информация о поперечном прогибе - как разность показаний датчиков 1, расположенных на башнях дока.
Выравнивание кренов, дифферентов и прогибов производится закрытием
51
распределительных задвижек 16 бал- ластных отсеков, которые создают достаточный для выравнивания и противоположно направленньй момент. Выбор отсеков производится также в зависимости от степени их заполнения балластом, т.е. в зависимости от показаний датчиков 2 уровня маневрового балласта по отсекам. Величины кренов, дифферентов, проги- бов, уровней погружения, уровней балласта в отсеках высвечиваются на блоке 11 индикации.
Остановка операции производится оператором заданием на задатчике 4 команды Стоп или при достижении заданного уровня погружения.
Работа системы при выполнении операции .Всплытие происходит следующим образом.
Оператор на задатчике 4 задает операцию Всплытие, по которой начинает выполняться программа всплытия, записанная в ППЗУ микроЭВМ 9.
По этой программе производится открытие отливных задвижек 14 и распределительных задвижек 16, запуск водоотливных насосов 13, откачка балласта из балластных отсеков с выравниванием возникающих кренов,диф- ферентов и прогибов дока.
Информация о крене, дифференте и прогибах дока получается аналогично операции погружения. Выбор отключаемых отсеков производится как и при погружении, но с учетом того, что балласт не принимается, а откачивается (т.е. выбираемое воздействие должно быть противоположно по знаку).
Остановка всплытия производится оператором заданием на задатчике 4 команды Стоп или при достижении нижнргх уровней в балластных отсеках
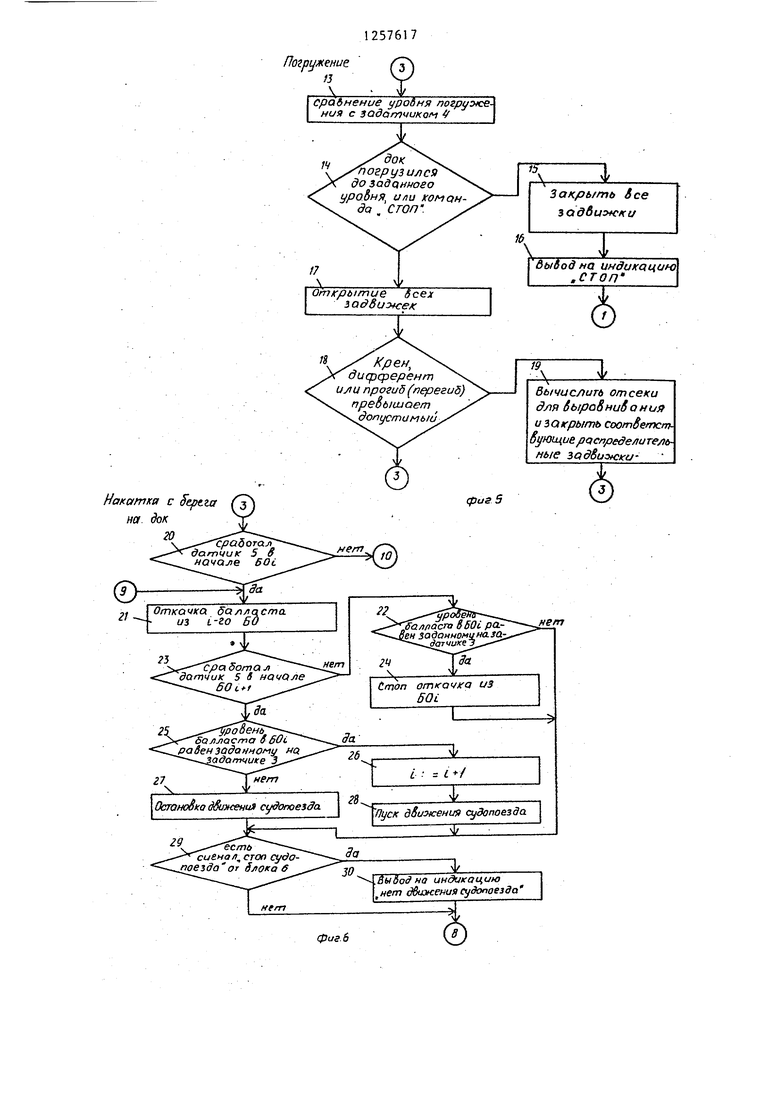
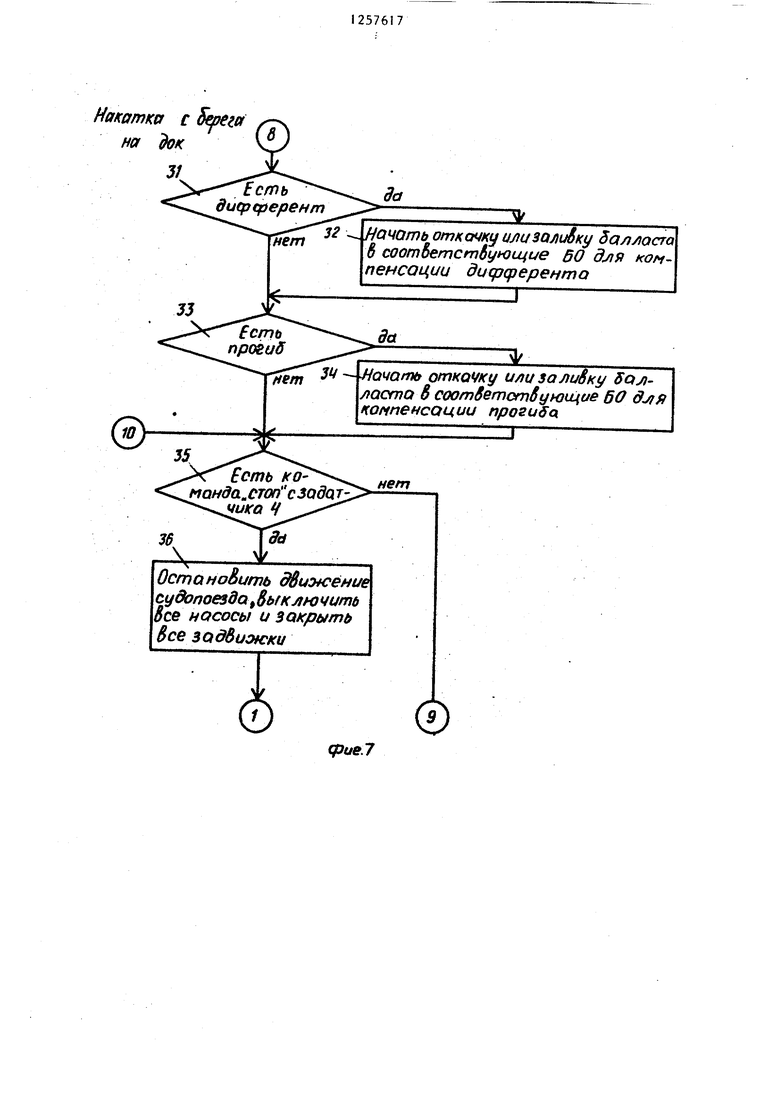
Работа системы при проведении опрации Накатка судопоезда на док происходит следующим образом.
Оператор на задатчиках 3 уровня откачки и заливки по балластным отсекам устанавливает уровни необходимой откачки с учетом объема ждд ких грузов на доке, которые определяются в зависимости от массы принимаемого судопоезда и способа его постановки на судовозной палубе, и далее на задатчике 4 задает операци Накатка судопоезда, по которой проводит выполнение программы накат
1
0
5 0
5 0
5
76
ки судопоезда на док, записанной в ППЗУ микроэвм 9.
Программа составляется таким образом, что откачка -из отсеков каждо- го понтона начинается при срабатывании датчика 5 в начале этого понтона и продолжается до сравнения фактического уровня в каждом отсеке с заданным на задатчиках 3.
Блок 6 контроля положения судопоезда по импульсным сигналам, поступающим от датчиков 5 при наезде каждого колеса судопоезда, формирует сигналы положения судопоезда по мере его продвижения, по которым начинается откачка из каждого последующего понтона, а при остановке судопоезда формирует сигнал Стоп, по которому процесс откачки прекращается.
Соответствие принятой массы судопоезда массе откачанного балласта в каждый момент времени обеспечивается выбором соответствующей производительности балластных насосов 13.
Информация о возникающих дифферентах берется как разность показаний носовых и кормовых датчиков 1 уровня погружения, о продольном прогибе - как разность показаний носовых, кормовых и установленных в центре башен датчиков 1.
Выравнивание возникающих дифферентов и прогибов производится осушением или заполнением балластных отсеков, не участвующих в компенсации массы судопоезда.
Остановка операции производится по команде оператора, задающего на задатчике 4 команду Стоп.
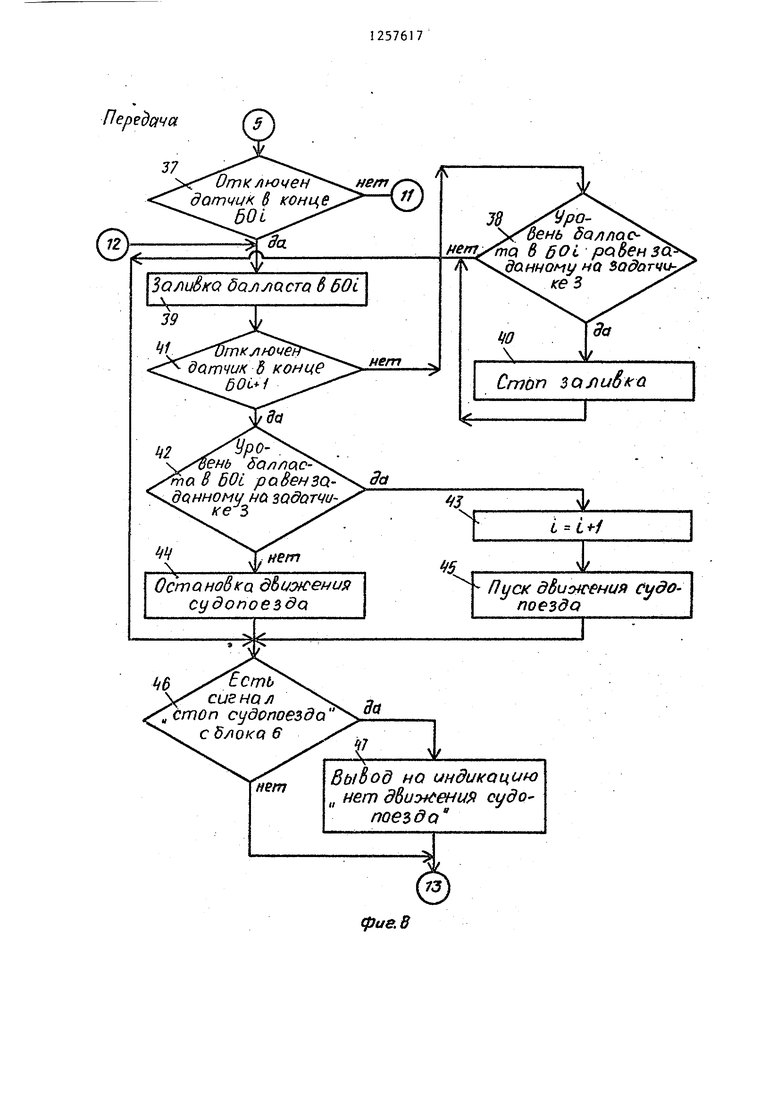
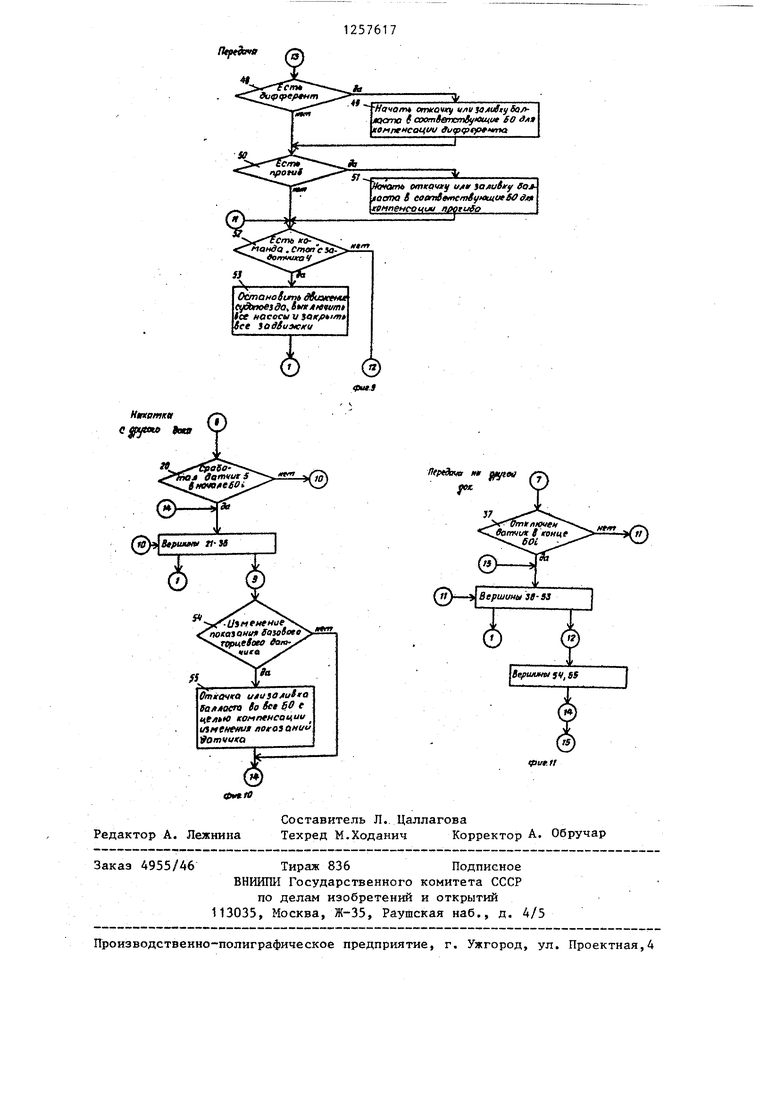
Операция Передача на берег производится аналогично, только на задатчиках 3 уровня откачки и заливки устанавливаются необходимые уровни заливши, а заливка в отсеки понтона производится при освобождении датчика на задней границе каждого понтона.
При передаче судопоезда на плаву с дока на док работа системы аналогична работе ее при накатке или передаче с постановкой на одну береговую опору с тем отличием, что базовым считается тот торцовьм датчик 1, со стороны которого пристыкован второй док, и дополнительно производится поддержание неизменным первоначально зафиксированного на нем уровня погружения.
Формула изобретения
1. Система управления доковыми операциями, содержащая датчики положения судопоезда и блок дистанционного управления, выходы которого подключены к входам соответствующих исполнительных механизмов, отличающаяся тем, что, с целью расширения области применения системы за счет обеспечения управлением доковыми операциями доков всех назначений и сокращения объема гидротехнических работ по сооружению подводных опор для передаточных доков,она содержит устройство обработки и управления данными,коммутатор, блок сопряжения, блок контроля положения судопоезда, блок вывода, блок индикации, а также датчики уровня погружения дока, датчики уровня маневрового балласта в отсеках и жидких грузов н цистернах, задатчики уровня заливки и откачки по отсекам, задат- .чик проводимой операции, выходы которых подключены к первой группе информационных входов коммутатора, группа управляющих входов которого соединена с группой выходов управления опросом блока сопряжения, а группа выходов - с группой информационных входов блока сопряжения.
вход-выход интерфейса устройства обработки и управления данными подключен к входу-выходу .интерфейса блока сопряжения, группа управляю- щих выходов которого соединена с группой входов блока вывода, подключенного группой выходов к соответствующим входам блока индикации и блока дистанционного управления,
выходы датчиков положения судопоезда соединены с соответствующими входами блока контроля, выходы которого подключены к второй группе информационных входов коммутатора.
2. Система поп.1, отличаю- щ i- я с я тем, что блок контроля положения судопоезда содержит и+1 элементов памяти и реле времени (п - количество датчиков положения судопоезда), а также сумматор, входы которого подключены к соответствующим входам блока и к первым входам соответствующих элементов памяти и входам соответствующих реле времени,
выходы которых соединены с вторыми входами соответствующих элементов памятиj выходы которых подключеньг к соответствующим выходам блока, выход сумматора соединен с первым входом
Oi+1)-ro элемента памяти и с первым входом (п+1)-го реле времени, выход которого подключен к второму входу (n + D-ro элемента памяти, соединенного выходом с соответствующим дополнительным выходом блока.
фus.Z
Всплытие 6
сраоненив урооня погрузке- HU9с задотчикон V
За
OcmQHooKct насосов и закрытие Всех о 3 ад&имсек
Опрос за да т чих а
мет
Вывод но unduxQuL/Hi 9 . стоп
открытие Всех лодаи млк и зопусх насосов
Крен,
дидзарерент или оеиб (перееиб) npt&bi- uioem допустимый
Ja
12
вычис/ч/ть отсеки для ВырабниВаниа и 30(крь1ть соотВет- стбующие распределительные зод6имс1 и
Погружение /j
сравнение уробня г огру:же- ния с задатчико
дои
погруз и/1ся до 3adQHHoso уроЬня, или команда стоп: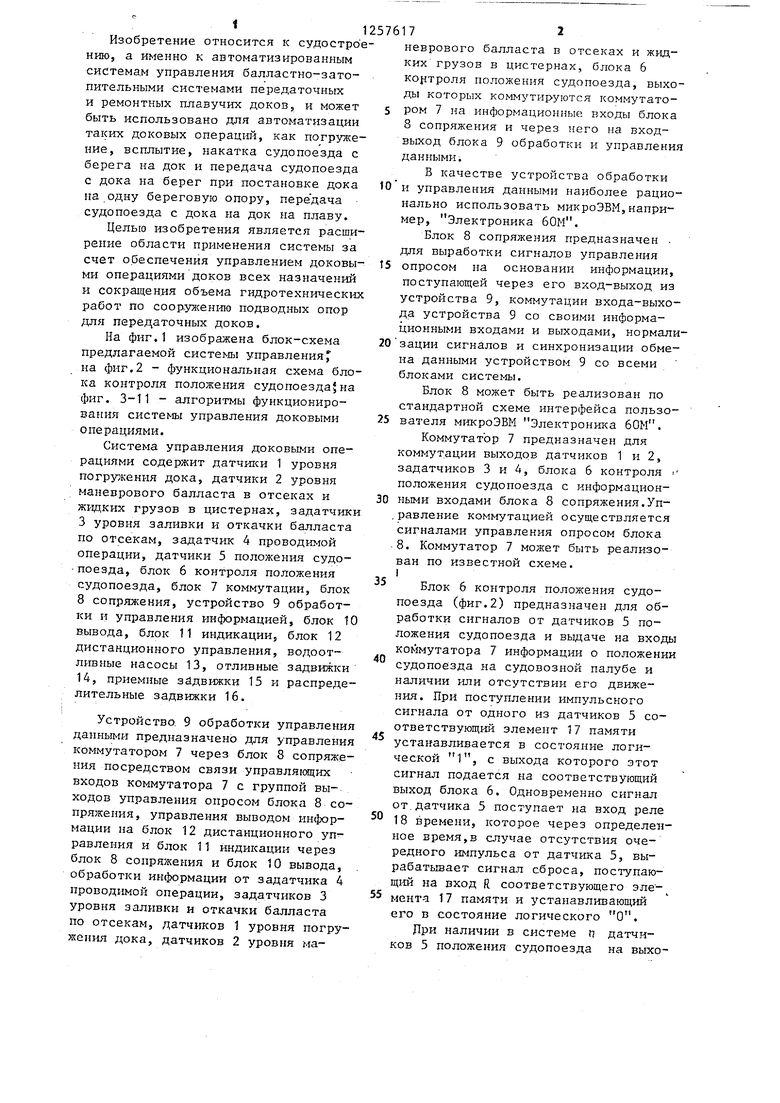
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВУЧИЙ ПЕРЕДАТОЧНЫЙ ДОК | 2016 |
|
RU2615026C1 |
| СПОСОБ ПОГРУЗКИ-ВЫГРУЗКИ И ТРАНСПОРТИРОВКИ НА СУДНЕ НЕГАБАРИТНОГО ТЯЖЕЛОВЕСНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2180636C2 |
| Плавучее сооружение для перевозки тяжелых грузов | 1980 |
|
SU979202A1 |
| Система управления накаткой судов | 1970 |
|
SU727514A1 |
| Плавучий док | 1988 |
|
SU1586956A1 |
| СУДНО-ДОК | 2006 |
|
RU2326786C1 |
| ПЛАВУЧИЙ ПЕРЕДАТОЧНЫЙ ДОК | 2012 |
|
RU2506196C1 |
| Передаточный плавучий док | 1981 |
|
SU1009895A1 |
| Плавучий док | 1977 |
|
SU648071A3 |
| Плавучий док и способ докования в нем судов | 1983 |
|
SU1104053A1 |
Изобретение относится к области судостроения, в частности к автоматизированным системам управления бал- ластно-затопительными системами передаточных и ремонтнь1х плавучих доков. Целью изобретения является расширение области применения системы за счет обеспечения управлением доковыми операциями доков всех назначений. Система управления доковыми операциями содержит датчики положения судопоезда, блок дистанционного управления, водоотливные насосы, приемные, отливные и распределительные задвижки, а также комплекс аппаратуры, включающий датчики уровня погружения дока, датчики уровня маневрового балласта в отсеках и жидких грузов в цистернах, задатчики уровней заливки и откачки по отсекам, блок контроля положения судопоезда на судовозной палубе, устройство обработки и управления данными, коммутатор, блоки вывода и индикации. При этом блок контроля положения судопоезда содержит элементы памяти, реле времени и сумматор, каждый . выход датчика положения судопоезда подключен к входу своего элемента памяти и входу своего реле времени, выход которого включен на стирающий вход этого элемента памяти, и одновременно все выходы датчиков положения подключены на входы,сумматора, выход которого также включен на вход дополнительного элемента памяти и на вход дополнительного реле времени, выход которого включен на стирающий вход дополнительного элемен- та памяти. Предлагаемая система автоматического управления доковыми операциями может быть использована для автоматизации таких доковых операций, как погружение, всплытие, накатка судопоезда на док и передача судопоезда с дока на берег при . постановке дока на одну береговую- опору, передача судопоезда с дока на док на плаву. 1 з.п. ф-лы, 11 ил. а 3 (Л N9 СП Ч а 
Иака/пкя с Stpt-ta ( на. док 20
фиг. 6
Накатка с на к
J/
JL
32 Ночоть откачку и цзалиВку Зал/юста ё соотВ€тст6ующ1 в 60 ком- пенсоции дидусреренто
L
34 - Начать отковку u/iuзаливку Sctj). ласта соответствующие 6 О для гсомпенсации прогибс(
Ва
JL
дл
L
u/iu ст ог
нет
ОстаноВить dBu fCeHue судопоезда Вьгключить See /лосось/ и закрыть
Все задвиогски
дэие7
Передача
Оста новK-Q движения сддопоеьда
Пуск судо- поеэдо
ВыЬод но индикацию „ нет д6и:и ени судо- поеъда
дзие.8
ffavotrtt откачгу или jajiufiy /юсто f ооотВетапвулцм SO л ммпенсацуи
Нсноть откачну ufit tofutiry Soj- toano t еовтввяктЛующмбО л лвмпенсании npotuSo
OtimOHoSumt S8u3it«Hui eySbnoesda Ivittnwmt Ice НОСОСЫ V iOKjMiait tee Зо Лилсяи
vV
.l
HlKOtnini
cyxftaw 9МЯ
Я
fS
Отхачка илаза и9 а еаллаеп во tet 0 е комп«нсоции изненем aoraSQHUu Tfomnufoi
fffpt3aw юг f/ytea г.
Редактор А. Лежнина
Составитель Л.. Цаллагова
Техред М.Ходанич Корректор А. Обручар
4955/46
Тираж 836Подписное
ВНИИГОГ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4
| Авторское свидетельство СССР , N 727514, кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
