1
Изобретение относится к судостроению, в частности к системе управления накаткой судов на спусковой док, . ,
Известна система управления накаткой судов на спусковой док, оборудованный РИДОМ понтонов, содержащая блок дистанционного управления, электроприводы балластных насосов, приемных и отливных клинкетов, причем насосы и клинкеты установлены на каждом понтоне 1 .
Недостатком такой системы является ручное дистанционное управление приводами клинкетов, что может привести к перегрузке опор и деформации дока, или снятию дока с мористой опоры и к аварии.
Целью изобретения является обеспечение автоматизации балластировки дока при накатке судна на спусковой док.
Для этого система снабжена переключателями, датчиками положения, автоматическими выключателями балластного насоса, включенными в цепь питания насоса, и реле времени, причем датчики положения соединены с одним входом автоматического вы1 лючателя балластногр насоса, а в цепь другого входа автоматического выключателя подключены замыкающие контакты реле времени., при этом датчик положения каждого предыдущего понтона подк.шочен к входу автоматического выключателя балластного насоса последующего понтона посредством переключателя и к блоку дистанцион0ного управления.
Кроме того, система снабжена дифферентометром, включенным в цепь электропривода балластного насоса последнего из ряда понтонов, и прог5раммным механизмом, включенным параллельно электроприводу балластного насоса.
Дополнительно датчик положения каждого предыдущего понтона подклю0чен в цепь электропривода приемного клинкета каждого последующего понтона.
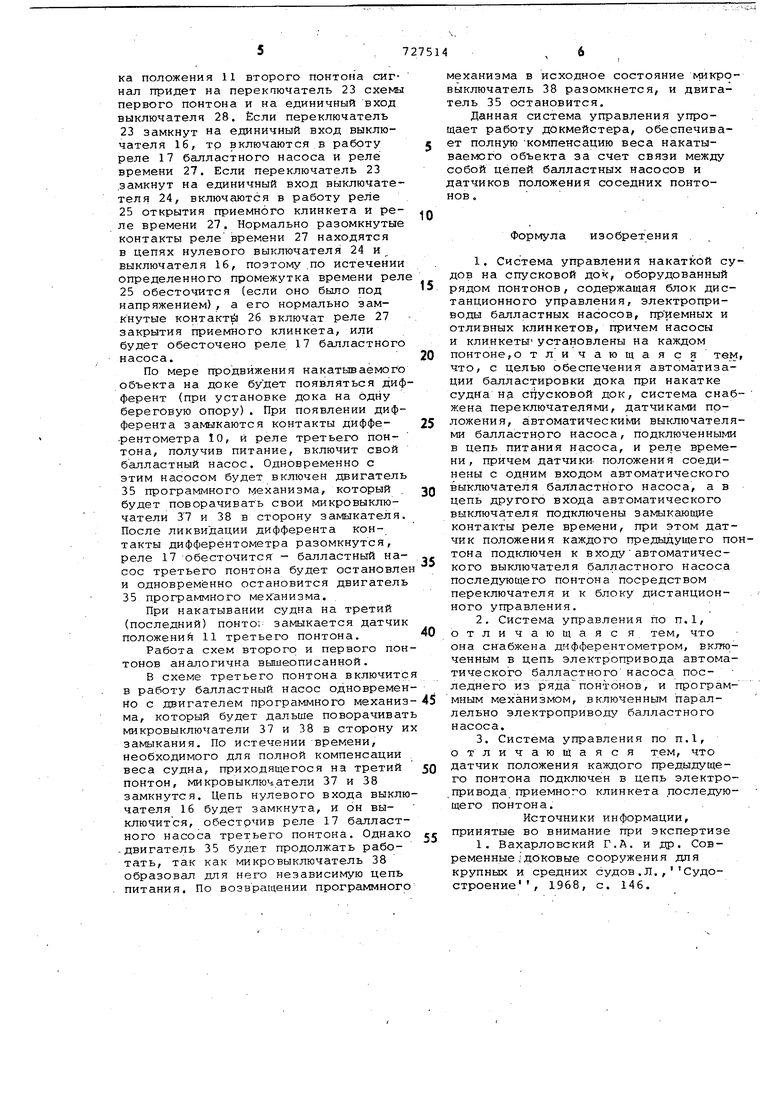
На фиг.1 Изображена блок-схема с системы управления; на фиг.2 - принципиальная схема системы управления.
Система управления накаткой состоит из блока дистанционного управления 1, связанного с блоком 2 накатки на док и блоком 3 накатки на стапельноё место. К блоку 2 подключены блок 4 выбора отливного клинкета и баипластного насоса. К блоку 4 подсоединены отливные клинкеты 5 и балластные насосы 6 с электроприводами, а к блоку 3 накатки на стапельное место подключен блок 7 выбора приемного клинкета, связанный с приемными клинкетами 8.
Необходимая информация о состоянии системы док-судно обеспечивается датчикамигпрогибомером 9, дифферентометром 10, датчиком положения 11 (для определения положения накатываемого судна по длине) , датчиком 12 уровня акватории. Все эти датчики подключены к блоку 2 накатки надок и блоку 3 накатки на стапельное место. Блоки 2 и 3 связаны также с отсечными клинкетами 13 и с пультом управления 14 Судовозных тележек. Для аварийной защиты системы служит блок аварийной защиты 15, Датчики положения 11 установлены на стапельпалубе дока вдоль рельсовой эс.такады и число их различно в зависимости :от числа понтонов (для данного.случая взято три понтона) или бсшластны отсеков. Датчик положения 11 связан с автоматическими выключателями 16, которые при замыкании контактов датчика положения 11 включают реле 17 балластного насоса. Выключатель 18 подключен к выходу соответствующих выключателей 16, замыкающихся на реле времени 19, служащего для контроля работы балластного насоса при его первом включении. За1иыкающие контакты 20 реле 19 включены в цепь входа выключателя 16, В цепьреле 21 закрытия отливного клинкета включены размыкающие контакты 22 соответствующих реле 17,
Переключатель 23 пoi ключeн к схем первого понтона и к датчику положе-. нйя слёдующ его понтона, таким же образом этот переключатель в следующем понтоне подключен к датчику положения третьего понтона, В зависимости от весовой характеристики накатываемого .судна переключатель 23 может быть подключен к входу выключателя 24, включающего реле 25 открытия приемного клинкета, либо на вход выключателя 16, включающего реле 17 балластного насоса. Размыкающие контакты 26 реле 25 включены в цепь рел 2 зак1эытия приемного клинкета.
Автоматические выключатели 28 подютючены к реле времени 29. К входу выключателя 28 в схеме первого понтбна подключен датчик положения второго понтона, а к соответствующему выключателю в схеме второго понтона датчик положения третьего понтона, Замы{сак)щие контакты 30 реле времени 29 включены в цепи входа выключателя 24 и выключателя 16, Переключатель 31, подключенный к датчику положеНИН третьего понтона, может быть замкнут либо на вход выключателя 24, либо выключателя 16.
Автоматический выключатель 32, подключенный к реле времени 33, связан своим входом с датчиком положения третьего понтона. Замыкающие контакты 34 реле времени 33 включены в цепь входа выключателя 24 и выключателя 16.
Дифферентометр 10 своими замыкающими контактами (не указаны на схеме включен непосредственно в цепь реле балластного насоса третьего понтона. Двигатель 35 программного механизма включен параллельно реле балластного насоса третьегопонтона. В цепи якоря двигателя 35 имеется регулировочное сопротивление 36, спомощью которого устанавливается необходимая скорость вращения двигателя, которая определяется в соответствии с необходимой продолжительностью работы балластного насоса третьего понтона.
Программный механизм имеет также два микровыключателя 37, 38, которые замыкаются одновременно по истечению времени, . необходимого для работы насоса, иди сразу после возвращения программного механизма в исходное .положение. Микровыключатель 37 включен в цепь входа выключателя 16 третьего понтрна. Микровыключатель 3 находится в цепи независимого питани двигателя 35 программного механизма. В схеме диоды 39 служат для развязки отдельных частей схемы.
Все автоматические выключатели имеют единичный вход для включения выключателя и нулевой для выключения выключателя.
При накатывании судна на первый понтон замыкается датчик положения 11 Первого понтона, что приводит к замыканию цепей единичных входов автоматического выключателя 16, включающего реле 17 балластного насоса 6 и выключателя 18, включающе: о Основное реле времени 19. Реле 17 включае в работу балластный насос с одновременным включением электропривода отливного клинкета на открытие. Реле времени 19 по истечении .времени, необходимого для работы насоса, чтобы скомпенсировать вес накатываемого судна, приходящийся на первый понтон замыкает свои контакты в цепи нулевого входа автоматического выключателя 16. В результате этого реле17 обесточивается, насос останавливаетс Нормально замкнутые контакты 22 реле 17 включат реле 21 закрытия отливног клинкета. Одновременно обесточится реле времени 19. -При накатывании судна на второй понтон замыкается датчик положения 1 второго понтона. Работа схемы второго понтона при этом будет аналогична вышеописанной. Одновременно с датчика положения 11 второго понтона сигнсш придет на перекпючатель 23 схемы первого понтона и на единичный вход выключателя 28. Если переключатель 23 замкнут на единичный вход выключателя 16, тр включаются в работу реле 17 балластного насоса и реле времени 27. Если переключатель 23 .замкнут на единичный вход выключатетеля 24, включаются в работу реле 25 открытия приемного клинкета и реле времени 27. Нормально разомкнутые контакты реле времени 27 находятся в цепях нулевого выключателя 24 и выключателя 16, поэтому .по истечении определенного промежутка времени реле 25 обесточится (если оно было под напряжением), а его нормально замкнутые контактй 26 включат реле 27 закрытия приемного клинкета, или будет обесточено реле 17 башластного насоса.
По мере продвижения накатываемого объекта на доке будет появляться дифферент (при установке дока на одну береговую опору). При появлении дифферента замыкаются контакты диффе.рентометра 10, и реле третьего понтона, получив питание, включит свой балластный насос. Одновременно с этим насосом будет включен двигатель 35 программного механизма, который . будет поворачивать свои микровыключатели 37 и 38 в сторону замыкателя. После ликвидации дифферента контакты дифферентометра разомкнутся, реле 17 обесточится - балластный насое третьего понтона будет остановл.е и одновременно остановится двигатель 35 программного механизма.
При накатывании судна на третий (последний) понто;- замыкается датчик положений 11 третьего понтона.
Работа схем второго и первого понтонов аналогична вышеописанной.
В схеме третьего понтона включитс в работу балластный насос одновременно с двигателем программного механиз ма, который будет дальше поворачиват микровыключатели 37 и 38 в сторону и замыкания. По истечении -времени, необходимого для полной компенсации веса судна, приходящегося на третий понтон, микровыключатели 37 и 38 замкнутся. Цепь нулевого входа выключателя 16 будет замкнута, и он выключится, обестрчив реле 17 балластного насоса третьего понтона. Однако -двигатель 35 будет продолжать работать, так как микровыключатель 38 образовал для него независимую цепь питания. По возвращении программного
механизма в исходное состояние NMKPOвыключатель 38 разомкнется, и двигатель 35 остановится.
Данная система управления упрощает работу докмейстера, обеспечивает полную -компенсацию веса накатываемого объекта за счет связи между собой цепей балластных насосов и датчиков положения соседних понтонов .
Формула изобретения
1.Система управления накаткой судов на спусковой док, оборудованный рядом понтонов, содержащая блок дистанционного управления, электроприводы балластных насосов, приемных и отливных клинкетов, причем насосы
и клинкеты установлены на каждом понтоне, о тличающаяся тем что, с целью обеспечения автоматизации балластировки дока при накатке судна на спусковой док, система снабжена Переключателями, датчиками прложения, автоматическими выключателями балластнрго насоса, подключенными в цепь питания насоса, и реле времени, причем датчики, положения соединены с одним входом автоматического выключателя балластного насоса, а в цепь другого входа автоматического выключателя подключены замыкающие контакты реле времени, при этом датчик положения каждого предыдущего потона подключен к входуавтоматического выключателя балластного насоса последующего понтона посредством переключателя и к блоку дистанционного управления.;
2.Система управления по п.1, отличающаяс я тем, что она снабжена дифферентометром, включенным в цепь электропривода автоматического балластного насоса последнего из ряда понтонов, и программным механизмом, включенным параллельно электроприводу балластного насоса.
3.Система управления по п.1, отличающаяся тем, что датчик положения каждого предыдущего понтона подключен в цепь электропривода приемного клинкета последующего понтона.
Источники информации, принятые во внимание при экспертизе
1. Вахарловский Г.А. и др. Современные ; доковые сооружения для крупных и средних судов.Л.,Судостроение, 1968, с. 146.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления доковыми операциями | 1984 |
|
SU1257617A1 |
| ПЛАВУЧАЯ ВЕТРОЭЛЕКТРИЧЕСКАЯ УСТАНОВКА | 1998 |
|
RU2173280C2 |
| Плавучий док | 1990 |
|
SU1749119A1 |
| ЗАТВОР СУДОПРОПУСКНОГО ОТВЕРСТИЯ ГИДРОТЕХНИЧЕСКОГО СООРУЖЕНИЯ | 1992 |
|
RU2037009C1 |
| СПОСОБ ПОГРУЗКИ-ВЫГРУЗКИ И ТРАНСПОРТИРОВКИ НА СУДНЕ НЕГАБАРИТНОГО ТЯЖЕЛОВЕСНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2180636C2 |
| МНОГОАГРЕГАТНАЯ ПЛАВУЧАЯ ПРИБРЕЖНАЯ ВЕТРОФЕРМА | 2002 |
|
RU2258633C2 |
| Устройство для намотки изделий из микропровода в стеклянной изоляции | 1980 |
|
SU917219A1 |
| Установка для сбора и обезвреживания сточно-фекальных вод на судах | 1972 |
|
SU473638A1 |
| СИСТЕМА КОНТРОЛЯ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА ПРОТРАВЛИВАНИЯ СЕМЯН | 2019 |
|
RU2715689C1 |
| Система дистанционного управления двигателем | 1974 |
|
SU631670A1 |
Фиг.г.
