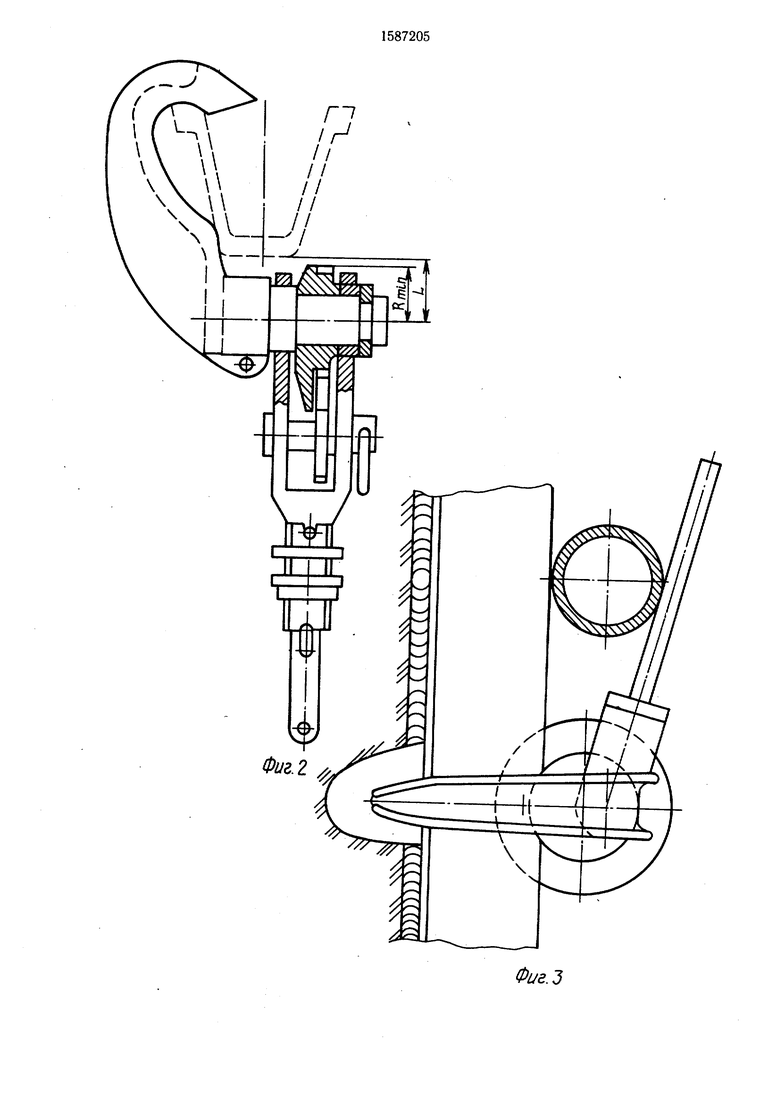
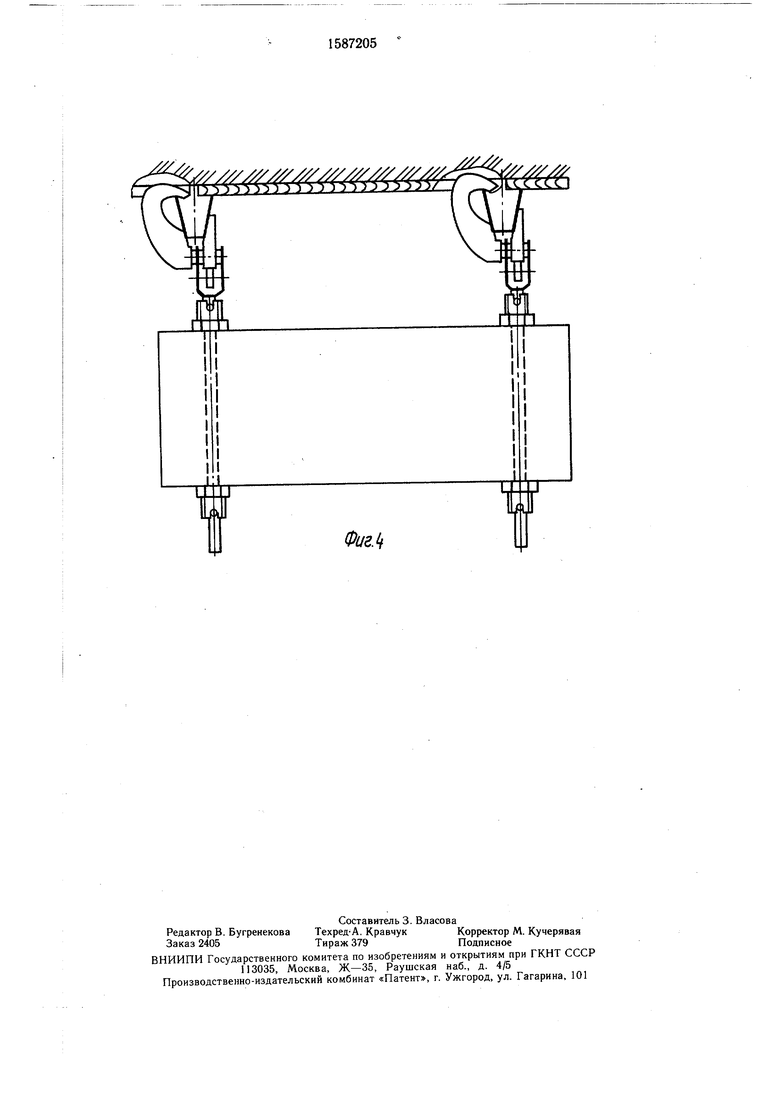
Изобретение относится к горному делу поверхностью профиля 10 крепи посредст- и может быть использовано для подвески вом контакта с конической поверхностью 7. груза на профилях шахтной крепи.Поворот зажимного эксцентрикового элеменНа фиг. 1 изображено устройство для та 2 осуществляется до тех пор, пока бо- закрепления груза на профиле крепи в рабо- g ковые поверхности профиля 10 не будут чем положении, общий вид; на фиг. 2 - то же, в расфиксированном положении; на фиг. 3 - схема закрепления груза, например трубопровода, на стойках крепи; на фиг. 4 - схема закрепления груза, наприхрапового механизма 12.
Установкой рычага 11 в нужное положение, которое осуществляется поворотом
зажаты между упором 6 н конической поверхностью 7 с усилием достаточным для надежного крепления устройства с грузом на профиле крепи.
Затем рычаг 11 устанавливается в поШШ VAtlvl ел ocin.pv iii iv.ii/jy.i ,iiui jx iГJ
мер полка для размещения оборудованияЮ ложение, необходимое для установки груза
на стойках крепи.(фиг- 3 и 4) и фиксируется посредством
Устройство для закрепления груза на профиле шахтной крепи содержит размещенные на оси 1 зажимной эксцентриковый
элемент 2 и захват 3, выполненный в его относительно зажимного эксцентрикового
де крюка 4 с выступом 5 и упором 6. За-элемента 2 осуществляется регулирование
жимной эксцентриковый элемент 2 представ-положения груза, которое изменяется вследляет собой эксцентрик с конической поверх-ствие деформации выработки,
ностью 7 которая обращена в сторону, Крепление груза к устройству осузахвата 3 Ось 8 зажимного эксцентрико-ществляется посредством фиксатора 15 и отвого элемента 2 размещена параллельно ос-20 верстий 16, которыми снабжен рычаг 11.
нованию 9 поперечного сечения профиля ШПри демонтаже устройства перекидная
крепи и удалена от него на расстояниесобачка 13 храпового механизма 12 устабольше минимального радиуса вращениянавливается в противоположное положение и
большого основания конуса.поворотом рычага 11 снимается зажимное
На оси 1 шарнирно установлен рычаг 11,,. усилие, а зажимной эксцентриковый элемент устанавливается в положение, при котором между основанием 9 профиля 10 и ближайшей к нему точкой большого основания
конуса зажимного эксцентрикового элемента 2 образуется зазор достаточный для 30 снятия устройства с крепи, перемещая его в сторону захвата 3 (фиг. 2).
Формула изобретения 1. Устройство для закрепления груза
с возможностью стопорения относительно зажимного эксцентрикового элемента 2, например, храповым механизмом 12, перекидная собачка 13 которого закреплена на рычаге 11, а упоры 14 - на зажимном эксцентриковом элементе 2.
На рычаге 11 установлен переставной фиксатор 15 и выполнены отверстия 16 для закрепления груза.
Зажимной эксцентриковый элемент 2 и рычаг 11 закреплен на оси 1 известным
способом, например посредством стопорного 35 « профилях шахтной крепи, включаю- кольца 17Щ размещенные на оси зажимной эксПодготовка устройства к закреплению центриковый элемент с упором, захват, вы- его на профиле 10 крепи заключается в полненный в виде крюка с выступом, рычаг, отличающееся тем, что, с целью
снижения трудоемкости монтажа и демонтажа устройства на профилях крепи, зажимной эксцентриковый элемент со стороны захвата выполнен с конической поверхностью, а рычаг установлен на оси шар-нирно с возможностью стопорения отнопланки пр офиля с тороньГ боковой 45 сительно зажимного эксцентрикового элемен- поверхности последнего. Поддерживая уст- та.
ройство в этом положении, поворотом ры-2. Устройство по п. , отличающееся iQV(,
чага 11 приводят зажимной эксцентриковый что рычаг выполнен с фиксаторами и от- элемент 2 во взаимодействие с боковой верстиями для груза.
установке перекидной собачки 13 храпового механизма 12 в положение, препятствующее свободному повороту рычага 11 относительно зажимного эксцентрикового элемента 2 под действием силы тяжести.
При монтаже устройства на элементе крепи крюк 4 захвата 3 заводится за
40
храпового механизма 12.
Установкой рычага 11 в нужное положение, которое осуществляется поворотом
(фиг- 3 и 4) и фиксируется посредством
конуса зажимного эксцентрикового элемента 2 образуется зазор достаточный для 30 снятия устройства с крепи, перемещая его в сторону захвата 3 (фиг. 2).
Формула изобретения 1. Устройство для закрепления груза
35 « профилях шахтной крепи, включаю- Щ размещенные на оси зажимной эксФиг. 2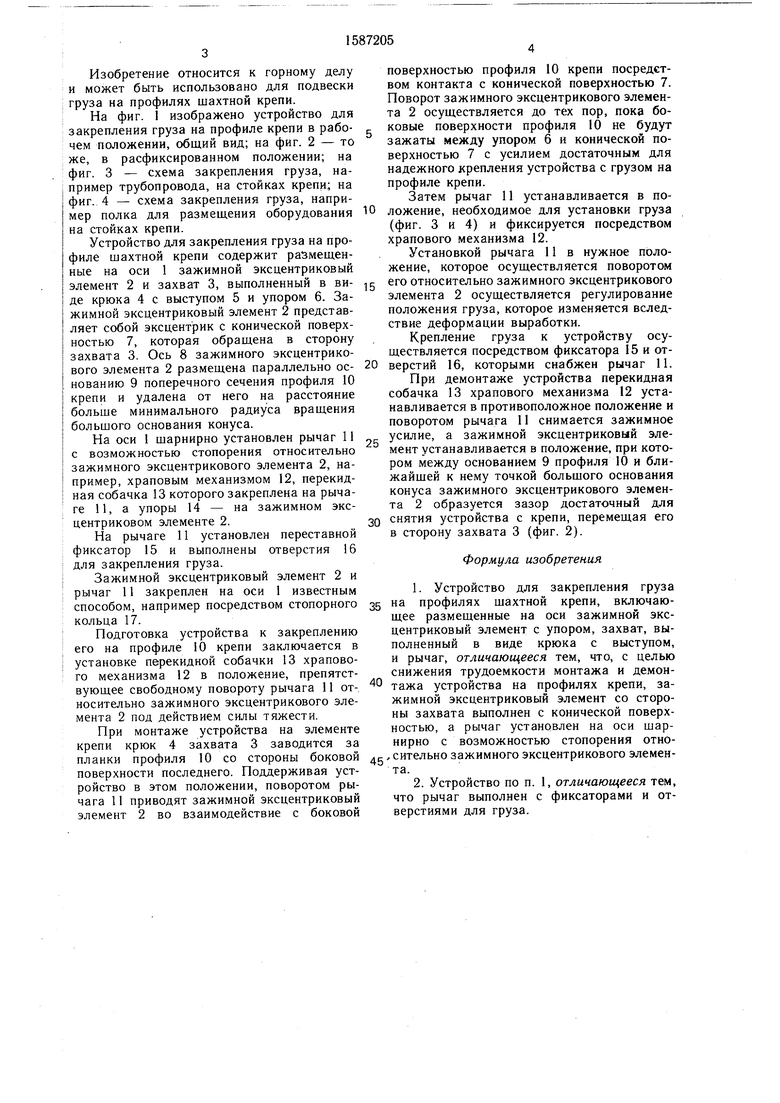
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для листовых материалов | 1983 |
|
SU1139693A1 |
| УСТРОЙСТВО ДЛЯ ЗАКРЕПЛЕНИЯ ГРУЗА | 2006 |
|
RU2415764C2 |
| САМОБЛОКИРУЮЩЕЕСЯ СПУСКОВОЕ УСТРОЙСТВО | 2014 |
|
RU2551180C1 |
| Храповое устройство с загрузкой сбоку | 2012 |
|
RU2617859C2 |
| Устройство для приема и выдачи штанг на буровом станке | 1978 |
|
SU739212A1 |
| ЗАМОК ДЛЯ ПОВОРОТНОЙ СТВОРКИ | 2024 |
|
RU2831827C1 |
| Захват-кантователь | 1979 |
|
SU823260A1 |
| Автоматическая револьверная головка | 1983 |
|
SU1151365A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПОДДЕРЖКИ ТРУБОПРОВОДА В ТРАНШЕЕ, ВЗАИМОДЕЙСТВУЮЩЕЕ С ТРУБОУКЛАДЧИКОМ | 1999 |
|
RU2175090C2 |
| Автоматическая каретка подвесной канатной установки | 1973 |
|
SU495223A1 |
Изобретение относится к горному делу. Цель - снижение трудоемкости монтажа и демонтажа устройства на профилях /П/ крепи. На оси 1 устройства установлены зажимной эксцентриковый элемент /Э/2, захват 3 и рычаг /Р/ 11. Захват 3 выполнен в виде крюка 4 с выступом 5 и упором 6, а Р11 имеет фиксаторы 15 и отверстия 16 для груза и установлен на оси шарнирно с возможностью стопорения относительно Э2 храповым механизмом 12. Со стороны захвата 3 Э2 выполнен с конической поверхностью 7. Собачка 13 механизма 12 закреплена на Р 11, а упоры 14 - на зажимном Э2. При монтаже устройства захват 3 зацепляется за П 10 с одной стороны. С другой стороны поворотом Р11 прижимают зажимной Э2. Затем Р11 устанавливается в положение, необходимое для закрепления груза, после чего Р11 фиксируется механизмом 12. При демонтаже устройства собачка 13 устанавливается в противоположное положение. Поворотом Р11 снимается усилие зажимного Э2 на П10. Зажимной Э2 устанавливается в положение, при котором образуется зазор между ним и основанием П10. 1 з.п. ф-лы, 4 ил.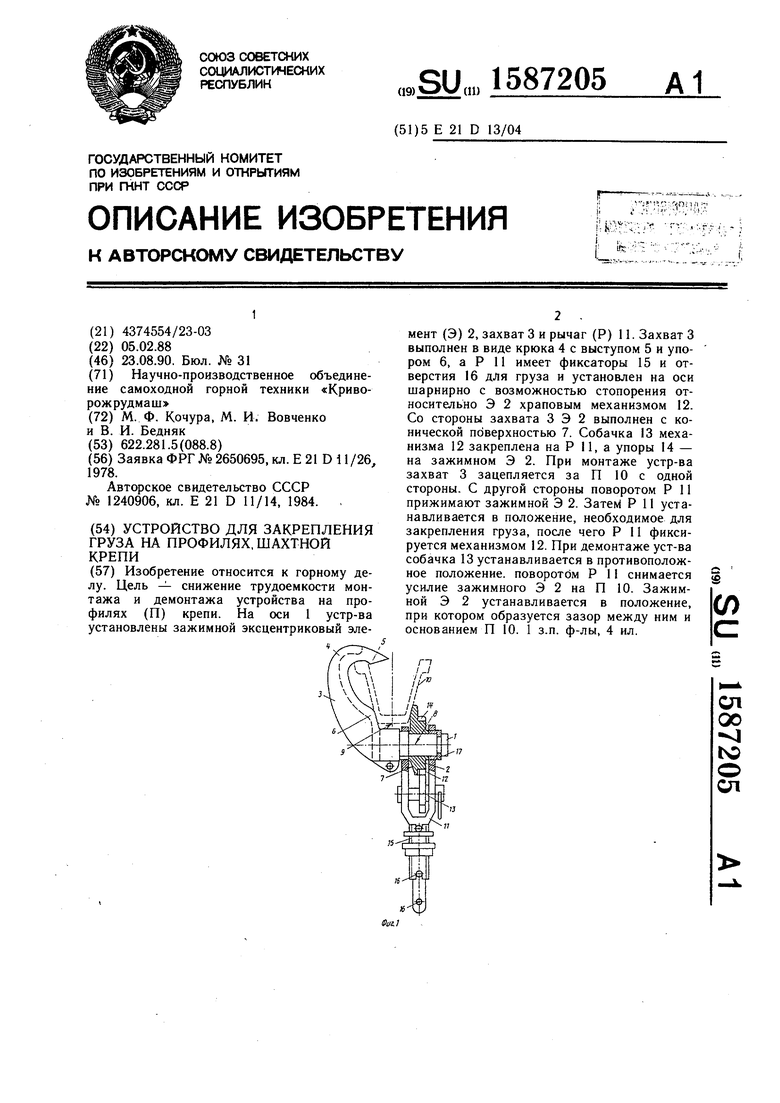
Фиг.
.- ////////////////////////////// «УьУЬ У v У$о УЗУ57
Йуг
/////// ее с с. . I
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ ТРАНСФОРМАТОРА | 2013 |
|
RU2650695C2 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Захват для стягивания элементов крепи | 1984 |
|
SU1240906A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| , | |||
