4
СП
го
1
Изобретение относится к электротехнике, а именно к электроприводам постоянного тока, управляемым по цепи якоря и возбуждения, и является усовершенствованием устройства по авт. св. № 758447.
Цель изобретения - уменьшение потерь энергии в двигателе за счет бо
матора 14 через блок 19 перемножения, второй вход которого связан с выходом сумматора 16, вход триггера
22соединен с выходом датчика 4 тока якоря, а его выход подключен к управляющим входам управляемых ключей
23и 24, исполнительные цепи первого из которых включены между выходами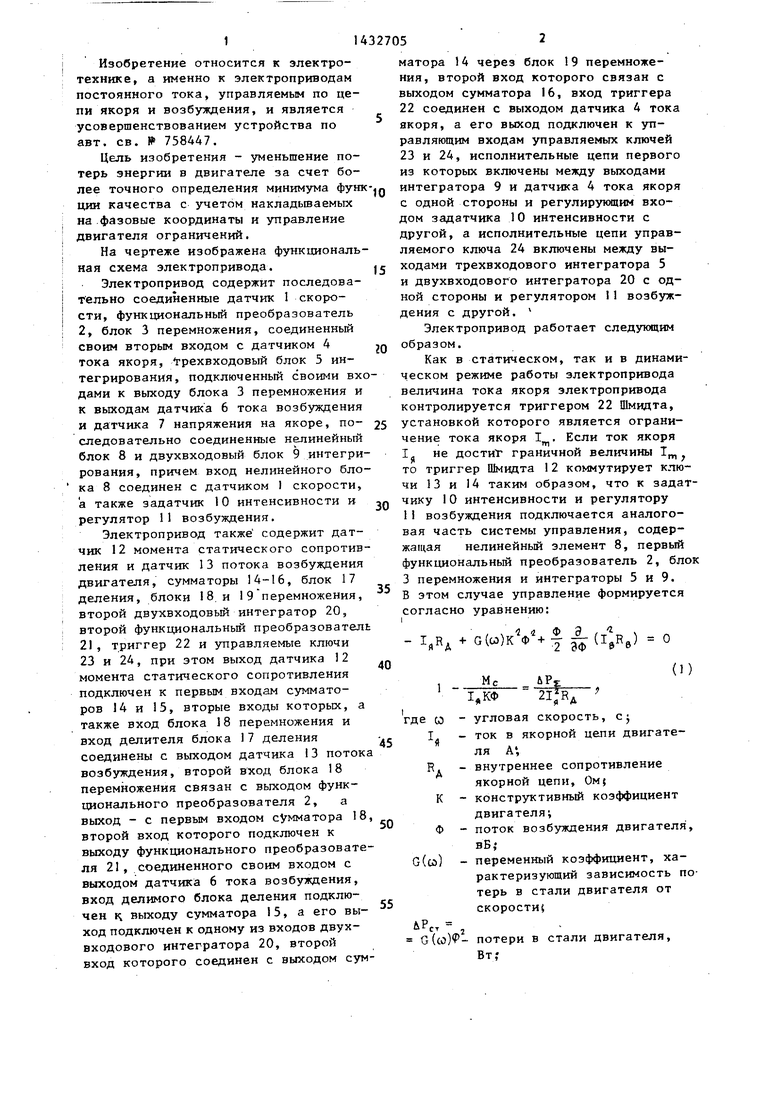
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1982 |
|
SU1107239A2 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1981 |
|
SU1003280A2 |
| Электропривод постоянного тока с минимиза-циЕй пОТЕРь B дВигАТЕлЕ | 1977 |
|
SU847474A2 |
| Система автоматического регулирования скорости электропривода | 1984 |
|
SU1277331A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Управляемый электропривод постоянного тока | 1974 |
|
SU499554A1 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1977 |
|
SU758447A2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Устройство оптимизации электропривода стенда для испытаний трансмиссий | 1988 |
|
SU1596305A1 |
Изобретение относится к электротехнике и может быть использовано для управления электродвигателями постоянного тока. Целью изобретения является уменьшение потерь энергии в двигателе за счет более точного определения минимума функции качества с учетом накладьшаемых на фазовые координаты и управление двигателя ог- граничений. Устройство содержит датчик 12 момента статического сопротивления, выход которого подключен к первым входам су «маторов 14, 15. Вход блока 8 перемножения и вход делителя блока 17 деления соединены с выходом датчика 13 потока. В данном устройстве обеспечивается оптимальное по потерям энергии функционирование электропривода с учетом ограничений, накладьтаемых на фазовые координаты электропривода. 1 ил. (Л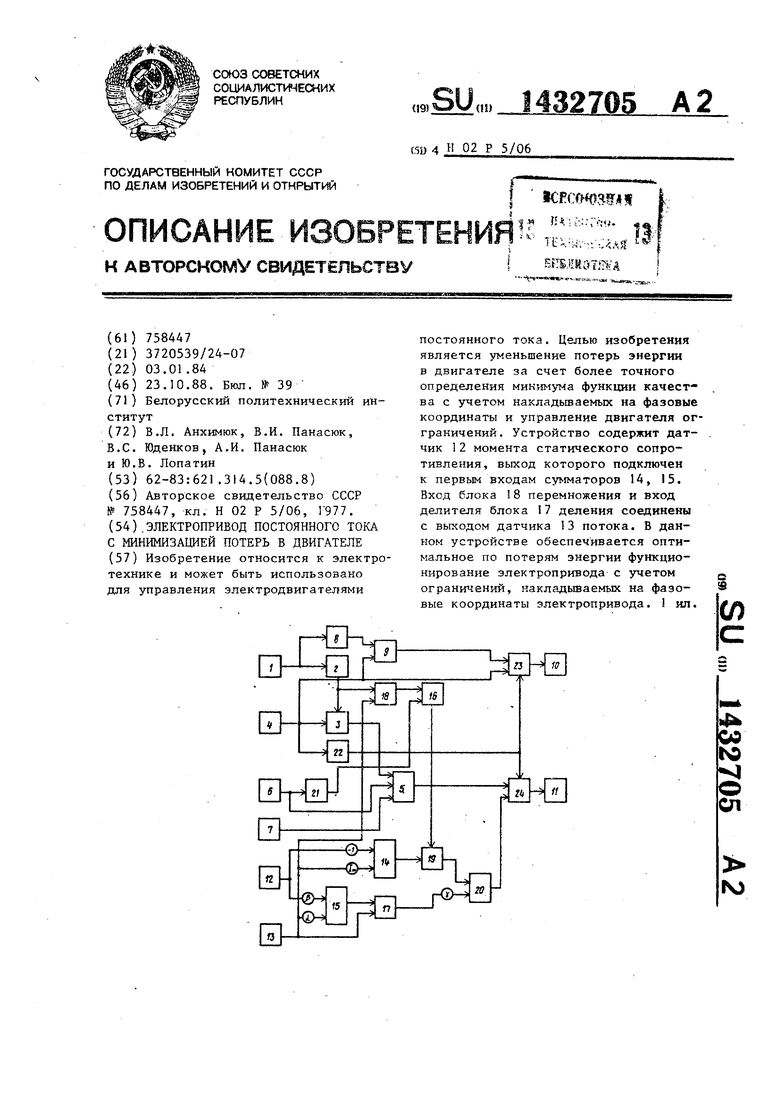
лее точного определения минимума функ-.д интегратора 9 и датчика 4 тока якоря
30
ции качества с учетом накладьшаемых на.фазовые координаты и управление двигателя ограничений.
На чертеже изображена функциональная схема электропривода.|е
Электропривод содержит последовательно соединенные датчик 1 скорости, функциональный преобразователь 2, блок 3 перемножения, соединенньй своим вторым входом с датчиком 4 jg тока якоря, грехвходовый блок 5 интегрирования, подключенный своими входами к выходу блока 3 перемножения и к выходам датчика 6 тока возбуждения и датчика 7 напряжения на якоре, по- 25 следовательно соединенные нелинейный блок 8 и двухвходовый блок 9 интегрирования, причем вход нелинейного блока 8 соединен с датчиком 1 скорости, а также задатчик 10 интенсивности и регулятор 11 возбуждения.
Электропривод также содержит датчик 12 момента статического сопротивления и датчик 13 потока возбуждения двигателя, сумматоры 14-16, блок 17 деления, блоки 18 и 19 перемножения, второй двухвходовый интегратор 20, второй функциональный преобразователь 21, триггер 22 и управляемые ключи 23 и 24, при этом выход датчика 12 момента статического сопротивления подключен к первым входам суммато- 1 - ров 14 и 15, вторые входы которых, а также вход блока 18 перемножения и вход делителя блока 17 деления соединены с выходом датчика I3 потока возбуждения, второй вход блока 18 перемножения связан с выходом функционального преобразователя 2, а выход - с первым входом сумматора 18, второй вход которого подключен к выходу функционального преобразователя 21, соединенного своим входом с выходом датчика 6 тока возбутедения, вход делимого блока деления подключен к выходу сумматора 15, а его выход подключен к одному из входов двух- &PCT J входового интегратора 20, второй ОСсо)- вход которого соединен с выходом сум35
40
с одной стороны и регулирунлцим входом задатчика 10 интенсивности с другой, а исполнительные цепи управляемого ключа 24 включены между выходами трехвходового интегратора 5 и двухвходового интегратора 20 с одной стороны и регулятором I1 возбуждения с другой.
Электропривод работает следующим образом.
Как в статическом, так и в динамическом режиме работы электропривода величина тока якоря электропривода контролируется триггером 22 Шмидта, установкой которого является ограничение тока якоря 1, Если ток якоря Ij, не ДОСТИГ граничной величины 1 то триггер Шмидта 12 коммутирует ключи 13 и 14 таким образом, что к задат чику 10 интенсивности и регулятору 11 возбуждения подключается аналоговая часть системы управления, содержащая нелинейный элемент 8, первый функциональный преобразователь 2, бло 3 перемножения и интеграторы 5 и 9. В этом случае управление формируется согласно уравнению:
I«RA
0(со)
9 ЗФ
(iftRe)
о
м,
UP,
(1)
45
I
где (О
I,
21:нд
R
50
55
1,КФ
угловая скорость, cj ток в якорной цели двигателя А,
внутреннее сопротивление якорной цепи, Ом$ конструктивный коэффициент двигателя;
поток возбуждения двигателя, вБ,
G(CO) - переменный коэффициент, характеризующий зависимость по терь в стали двигателя от скорости
потери в стали двигателя, Вт,А
К ф 0
е
g 5
1 - &PCT J ОСсо)-
5
с одной стороны и регулирунлцим входом задатчика 10 интенсивности с другой, а исполнительные цепи управляемого ключа 24 включены между выходами трехвходового интегратора 5 и двухвходового интегратора 20 с одной стороны и регулятором I1 возбуждения с другой.
Электропривод работает следующим образом.
Как в статическом, так и в динамическом режиме работы электропривода величина тока якоря электропривода контролируется триггером 22 Шмидта, установкой которого является ограничение тока якоря 1, Если ток якоря Ij, не ДОСТИГ граничной величины 1 то триггер Шмидта 12 коммутирует ключи 13 и 14 таким образом, что к задат- чику 10 интенсивности и регулятору 11 возбуждения подключается аналоговая часть системы управления, содержащая нелинейный элемент 8, первый функциональный преобразователь 2, блок 3 перемножения и интеграторы 5 и 9. В этом случае управление формируется согласно уравнению:
0(со)
9 ЗФ
(iftRe)
о
1 - &PCT J ОСсо)-
м,
UP,
(1)
1 - &PCT J ОСсо)-
5
I
где (О
I,
21:нд
R
0
5
1,КФ
угловая скорость, cj ток в якорной цели двигателя А,
внутреннее сопротивление якорной цепи, Ом$ конструктивный коэффициент двигателя;
поток возбуждения двигателя, вБ,
G(CO) - переменный коэффициент, характеризующий зависимость потерь в стали двигателя от скорости
А
К ф потери в стали двигателя, Вт,
Р
поток возбуждения двигателя, AI
сопротивление обмотки возбуждения, OMi
А ЛРст- ТвКв 4Рме, () - полные потери в двигателе,
Вт;
-механические потери, Вт,
-момент статического сопротивления на валу двигателяi Нм.
Выполнение условий (1) обеспечиает достижение минимума функционаа качества
7
Qn 1 , .ац ( F(i,, Ф,0) du
ЛР
ме
М„
(Oi
1«Ф-Ме
и
О,
при совместном регулировании тока якоря и потока возбуждения двигателя и тем. самым обеспечивает минимум потерь энергии,.вьщеляющихся в двигателе за время процесса без учета oi раничений, накладываемых на фазовые . координаты электропривода.
В статическом режиме сигнал с датчика 1 скорости поступает на вход функционального преобразователя 2 и нелинейного блока 8. Сигнал с выхода нелинейного блока 8 суммируется на входе интегратора 9 .(коэффициент К) с сигналом, пропорциональным току якоря (коэффициент К) и поступающим от датчика 4 тока якоря. Выходной сигнал интегратора 9. через ключ 23, управляемый триггером 22 Шмидта, уставкой которого является ограничение
по току якоря 1 , поступая на регулирующий вход задатчика 10 интенсивности, управляет изменением скорости привода. Интегратор 9 для предотвращения накопления на его выхо50
де больших сигналов в статическом ре- сигналы подаются на входы двухвходового интегратора 20 с соответствующими коэффициентами, на выходе которого формируется желаемое значение тока возбуждения. Для получения сигнала на втором входе блока 19 перемножения, пропорционального значению
Зт ( + G(w)P) служат сумматор
6 о ()ф
15, функциональный преобразователь 21 и блок 18 перемножения. Сигнал с датчика 6 тока возбуждения преобразуется функциональным преобразователем
ЭТв
жиме должен быть снабжен ограничителем выходного сигнала.Блок 3 перемножения осуществляет непрерьганое перемножение двух сигналов - поступающего от датчика 4 тока и якоря и поступающего от функционального преобразователя 2. На выходе блока 3 перемножения формируется сигнал, поступающий со знаком плюс и с коэффициентом К на первый вход интегратора 5. На второй его вход со знаком минус и с коэффициентом Kj поступает с датчика 7 сигнал, пропорциональный напряжению, приложенному
55
21
в величину.
На один ия
i
10
15
20
о25.
к якорю двигателя, а на третий его вход со знаком минус и с коэффициентом Kj поступает сигнал, пропорциональный току возбуждения от датчика 6. Сигнал с выхода интегратора 5 поступает на первый вход второго ключа 24, управляемого триггером 22 Шмидта, и далее на вход регулятора 1 возбуждения.
В динамическом режиме пока величина тока якоря не достигнет граничного значения I электропривод работает по той же схеме, как и в статическом режиме. При соответствующем выборе коэффициентов . поддерживается минимум энергии потерь в двигателе.в соответствии с законом управления (I ) до вьгходе тока якоря на ограничение I .
Если ток якоря двигателя вышел на ограничение, то триггер 22 Шмидта производит коммутацию ключей 23 и 24 таким образом, что управление электроприводом в динамическом режиме осуществляется по закону:
(в. с(а))Ф)(,)--Ьр,
9ф
(2)
0
0
где л находит из второго уравнения (l), т.е. начинает работать другая часть схемы управления.
Сигнал с выхода датчика 13 потока возбуждения подается на вторые входы сумматоров 5 и 14 с коэффициентами oi и 1 соответственно, а сигнал с выхода датчика 12 статического момента сопротивления на первые входы этих же сумматоров с коэффициентами (Ьи - I. Сигнал с выхода сумматора IS делится на сигнал с выхода датчика 13 потока возбуждения, а сигнал с выхода сумматора 14 умножается на сигнал с выхода сумматора 16. Эти
50
55
ЭТв
21
в величину.
На один ия
входов блока 18 перемножения подается сигнал, пропорциональ« ый коэффициенту G(W), характеризующему потери в стали двигателя, а на второй вход блока 18 перемножения подается сигнал с вьЕХОда датчика 3 потока возбуждения, . выходе блока 18 перемножения получаем сигнал С((о)Ф, который, складываясь с сигналом с выхода функционального преобразователя 21 с помощью сумматора 16, формирует на вькоде последнего сигнал, пропорциональный 31р
С(&9)ф) . Процесс разгона
ЭФ
двигателя, формируемой по закону, (2) с помощью вновь введенных элементов, осуществляется только при выходе тока якоря двигател : на ограничение 1. При снижении тока якоря ниже 1 управление формщ)уется по другому закону управления (1),Этот момент переключения контролируется триггером 22 Шмидта, выходной сигнал которого переключает ключи 23 и 24 на режим, идентичный описанному-статческому режиму.
.Таким образом обеспечивается оптимальное по потерям энергии функционирование электропривода с учетом ограничений накладьшаемьп;: ка фазовые координаты э.лектропривода, что способствует еще большему снижению потерь электроэнергии. Применение предлагаемого устройства позволит по сравнению с известным, з Т еньшить потери электроэнергии в среднем на 10-20%
Формула изобретения
Электропривод постоянного тока с минимизацией потерь в двигателе по авт. св. № 758447, отличающийся тем, что, :,с ц;У1ью уменьшения потерь энергии в двигателе за счет более точного определения минимума функции качества с учетом накладываемых на фазовые координаты и управление двигателя ограН1-1ченш 1, в него введены датч1-1ки момента статического сопротивления к потока вобуждения двигателя, три сумматора.
блок деления, второй и третий блоки перемножения, второй двухвходовый интегратор, второй функциональный преобразователь, триггер и два управляемых клгоча, при этом выход датчика момента статического сопротивления подключен к первьт входам первого и второго сумматоров, вторые
входы которых, а также вход второго блока перемножения и вход делителя блока деления соединены с выкодом датчика потока возбуждения, второй вход второго блока перемножения связан с выходом первого функционального преобразователя, а выход - с пер- вьм входом третьего сумматора, второй, вход которого подключен к выходу второго функционального преобразователя 5 соединенного своим входом с выходом ; датчика тока возбуждения, вход делимого блока деления подключен к выходу второго сумматора, а его выход подключен к из входов второго
двухвходового интегратора, второй
вход которого соединен с выходом первого сумматора через третий блок перемножения, второй вход которого связан с выходом третьего сумматора,
вход триггера соединен с выходом
датчика тока якоря, а его выход подключен, к управляющим входам управляемых ключей, исполнительные цепи первого из которых включены между выходами первого интегратора и датчика тока якоря с одной стороны и ре- гулир тощим входом задатчика интенсивности с другой, а исполнительные цепи второго управляемого ключа включены между выходами трехвходового интегратора и второго двухвходового интегратора с одной стороны и регулятором возб гждения с другой, причем второй ФЗ Нкциональный преобразователь реализует зависимость
т R .SI&- 5-йdФ
- ток возбуясдення электродвигателя;
- сопротивление обмотки возбуждения,
- поток возбуждения.
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1977 |
|
SU758447A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
