1
(21)4460054/31-11
(22)01.06.88
(46) 15.08.90. Бюл. № 30
(71)Уральский политехнический институт им. С.М.Кирова и Всесоюзный научно-исследовательский институт Электропривод
(72)В.В.Белошабский, Л.В.Вейнгер, Е.В.Катюхин, В.Ю.Зуев, С.Ю.Потоску- ев, В.Н.Ермак, Г.М.Иванов, А.Г.Иванов и В.И.Новиков
(53)629.113 (088.8)
(56)Авторское свидетельство СССР № 790091, кл. Н 02 Р 5/00, 1978.(54)УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ МЕХАНИЧЕСКОЙ ТРАНСМИССИИ
(57)Изобретение относится к регулируемым электроприводам переменного тока с синхронным двигателем и зави2 о
симымй инвертора ми тока и может быть использовано в стендах для испытания редукторов, дизелей, трансмиссий вер- толе тов и т.д.. с высокими, требованиями к ск орости нарастания и точности поддержания заданного динамического момента. Цель изобретения - расширение функциональных возможностей устройства для испытания механической трансмиссии. Устройство включает следующие дополнительные элементы: три трехфазных тиристорных реверсивных моста I6-18, шины переменного тока которых подключены соответственно к статорным обмоткам приводной 1 и нагрузочной 2 синхронных машин, датчики 20 и 21 напряжений фаз, датчики 22 и 23 углового положения синхронных машин, измерители 24 и 25 электромагнитных моментов и потокосцепле- ний синхронных .машин, формирователь
о
«
(Л

| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1987 |
|
SU1439727A1 |
| Электропривод | 1981 |
|
SU1083319A1 |
| Электропривод | 1987 |
|
SU1515324A1 |
| Вентильный электропривод | 1984 |
|
SU1205246A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| Электропривод | 1983 |
|
SU1167688A1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| Асинхронный электропривод с частотно-токовым управлением | 1984 |
|
SU1239824A1 |
| Способ управления асинхронным электроприводом и устройство для его осуществления | 1984 |
|
SU1458962A1 |
Изобретение относится к регулируемым электроприводам переменного тока с синхронным двигателем и зависимыми инверторами тока и может быть использовано в стендах для испытания редукторов, дизелей, трансмиссий вертолетов и т.д. с высокими требованиями к скорости нарастания и точности поддержания заданного динамического момента. Цель изобретения - расширение функциональных возможностей устройства для испытания механической трансмиссии. Устройство включает следующие дополнительные элементы: три трехфазных тиристорных реверсивных моста 16, 17, 18, датчики 20, 21 напряжений токов фаз 8, 9 приводной 1 и нагрузочной 2 синхронных машин, датчики 22, 23 углового положения этих машин, измерители 24, 25 электромагнитных моментов и потокосцеплений синхронных машин, формирователь заданий, регуляторы электромагнитного момента и потокосцеплений синхронных машин, формирователи управляющих напряжений, за счет которых обеспечивается устойчивая работа синхронных машин при их взаимной нагрузке во всем диапазоне требуемого нагружения при заданном быстродействии и стандартном для подчиненных систем регулирования характере переходных процессов. Использование синхронных машин и передача энергии на постоянном токе снимает ограничение по мощности и частоте вращения испытуемых трансмиссий, позволяет испытывать трансмиссии с произвольным передаточным числом. 1 з.п. ф-лы, 4 ил.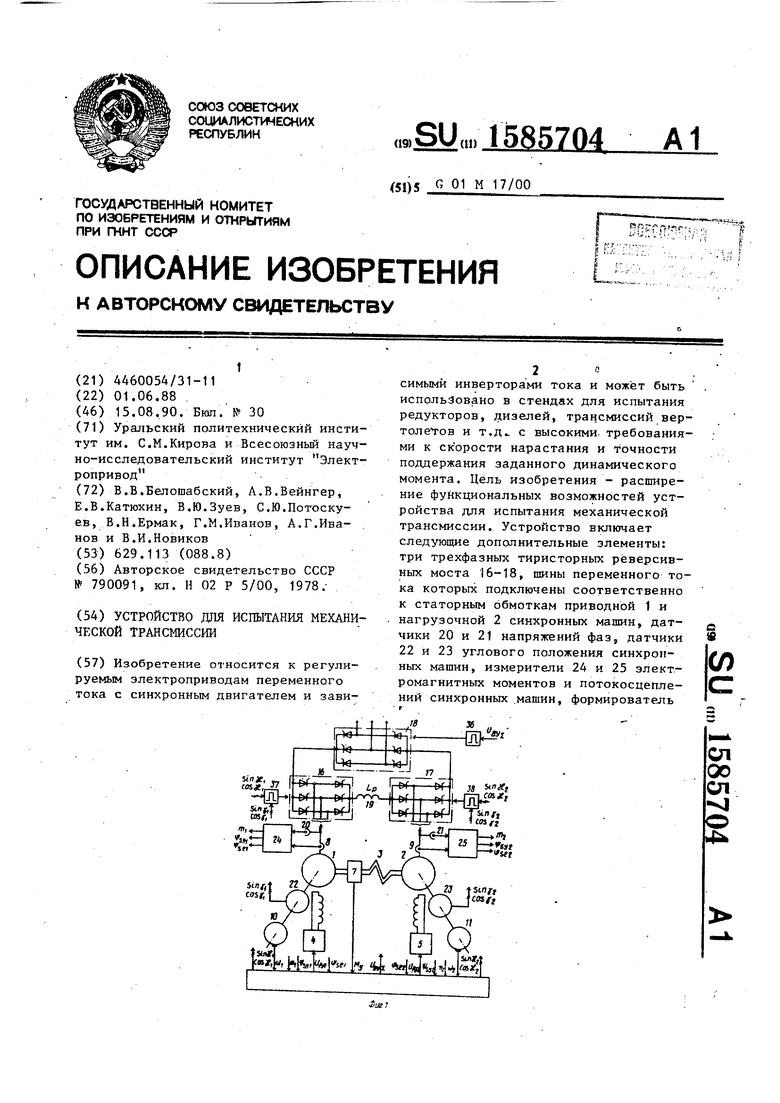
ел
00
ел
15857044
заданий, регуляторы электромагнитного н/чм гто момйнт;, „ п, х и1ного ном для подчиненных систем регулиооНЯНИПУапг г -тл.
f.-u.bj. .wiWAx i .1 riJrl MHtJl С
момента и потокосцеплений синхронных машин, формирователи управляющих напряжений, за счет которых обеспечивается устойчивая работа синхронных машин при их взаимной нагрузке во всем диапазоне требуемого нагружения при заданном быстродействии и стандарт -.v- jci yJiKlPO
вания характере переходных процессов Использование синхронных машин и передача энергии на постоянном токе сни мает ограничение по мощности и частоте вращения испытуемых трансмиссий позволяет испытывать трансмиссии с произвольным передаточным числом.
Изобретение относится к электротехнике, а именно к автоматизированным электроприводам с упругими механическими звеньями, и может быть использовано на стендах для испытания редукторов, дизелей, трансмиссий вер толетов и т.д.
Цель изобретения - расширение функциональных возможностей устройства.
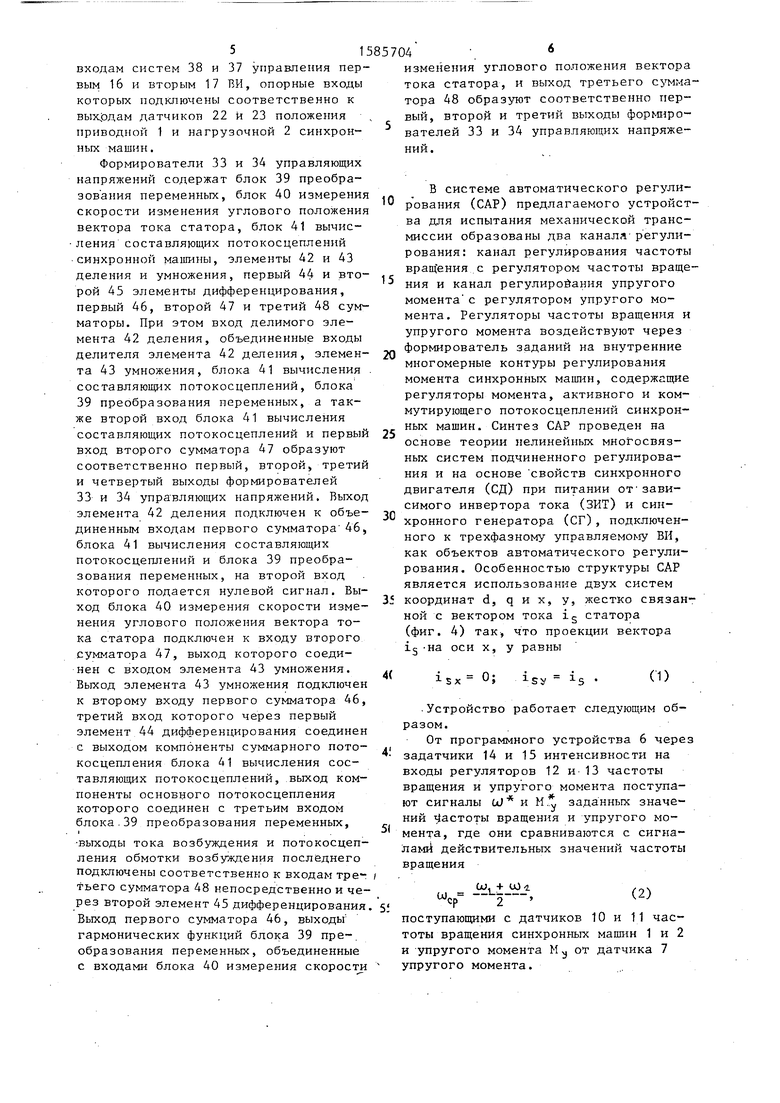
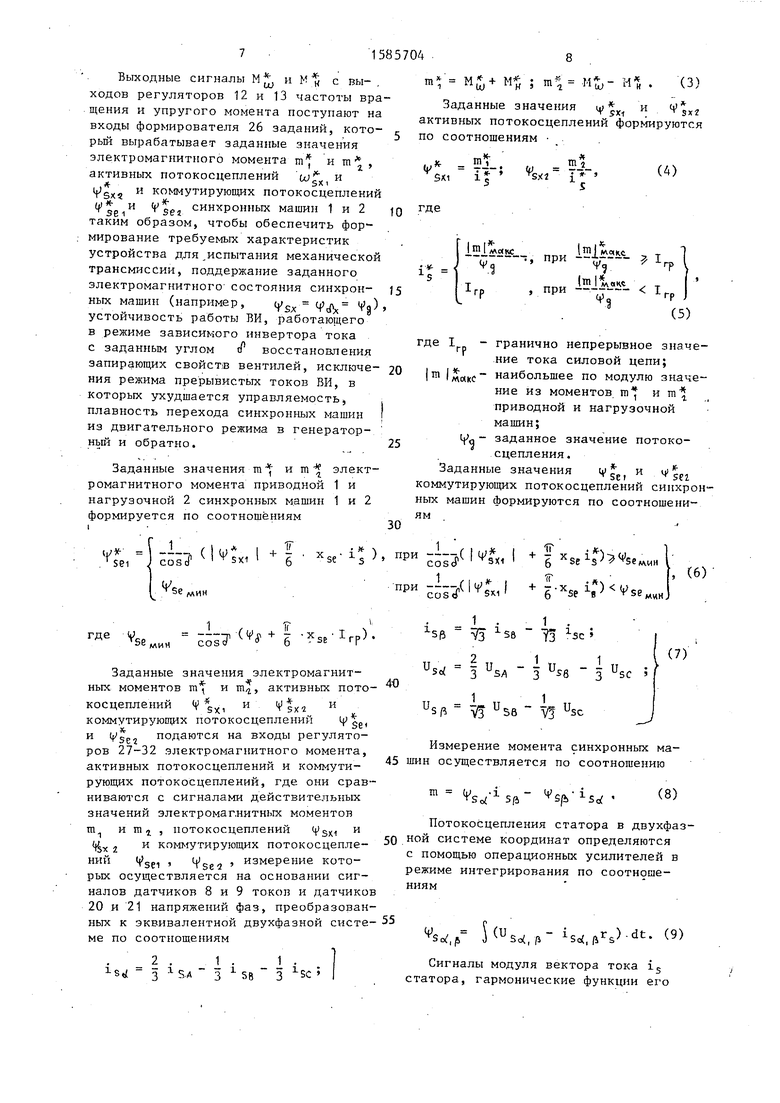
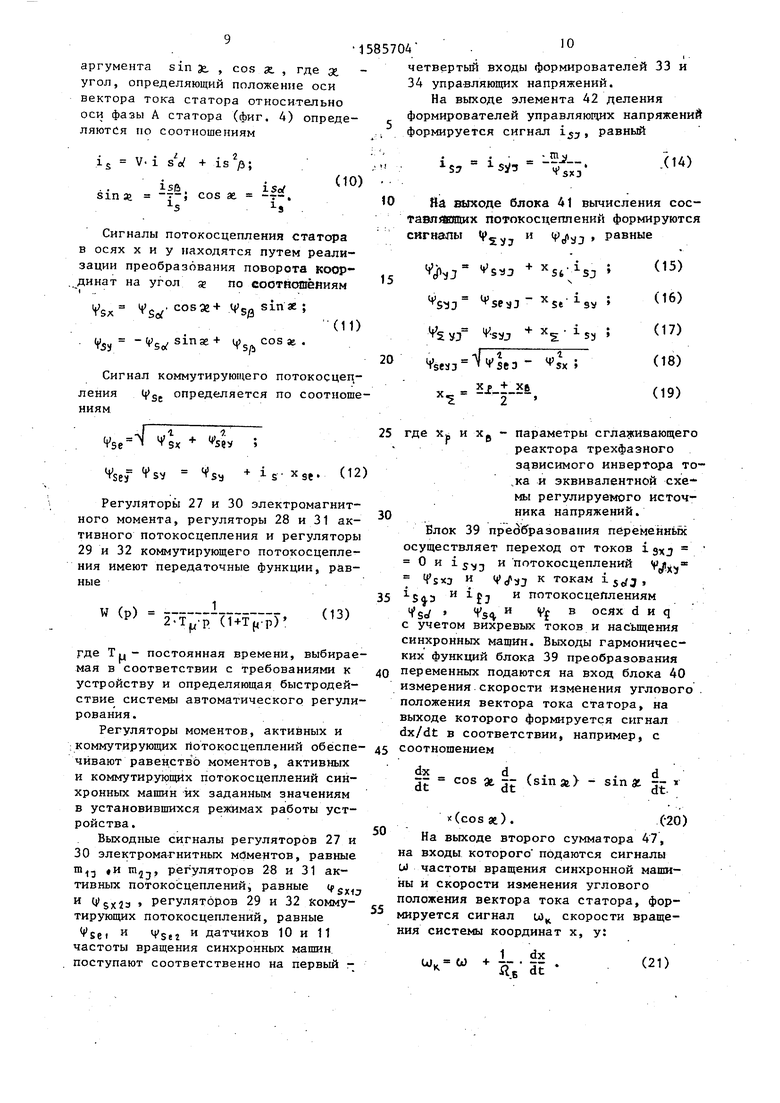
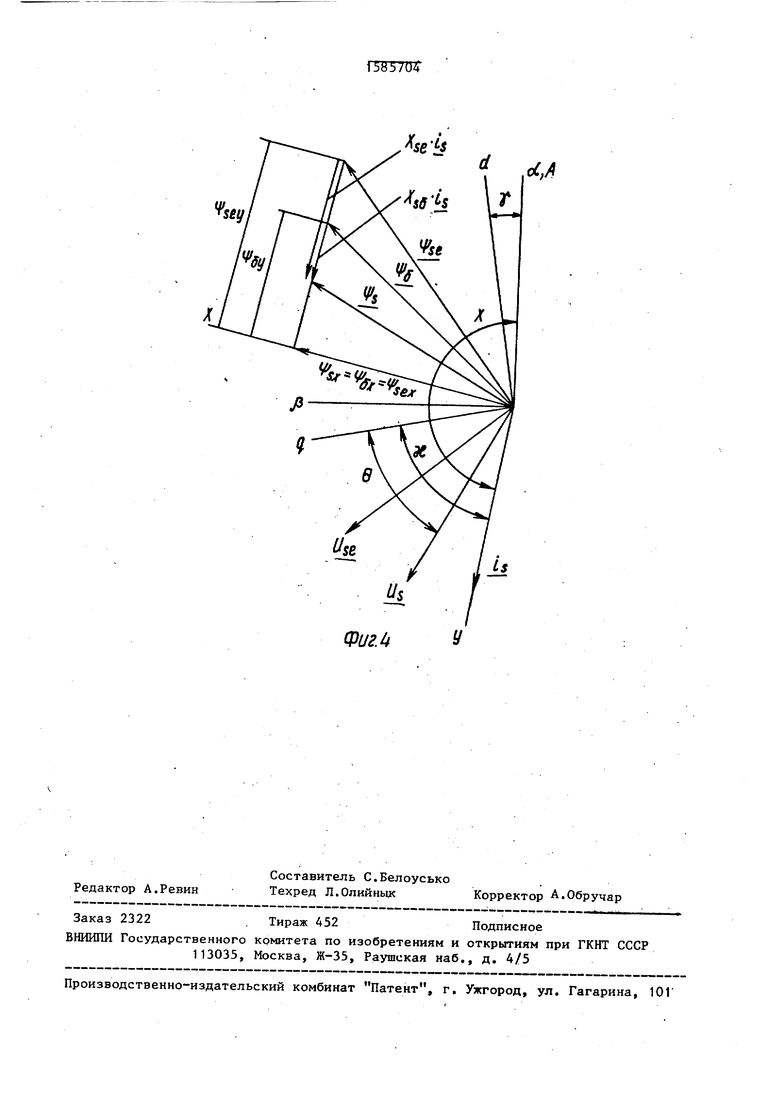
На фиг. 1 изображена Функциональная схема предлагаемого устройства; на фиг. 2 - функциональная схема системы управления устройством; на Фиг. 3 - функциональная схема входящего в состав системы управления формирователя управляющих напряжений; на фиг. 4 - векторная диаграмма, поясняющая работу синхронной машины (в режиме двигателя).
Устройство содержит приводную 1 и нагрузочную 2 синхронные машины, кинематически соединяемые испытуемой трансмиссией 3, возбудители 4 и 5 синхронных машин, программное устройство 6 и систему автоматического регулирования момента нагружения и частоты вращения, включающую датчик 7 упругого момента, датчики 8 и 9 токов фаз, датчики 10 и 11 частоты вращения синхронных машин, регуляторы 12 и 13 частоты вращения и упругого момента, управляющие входы которых через задатчики 14 и 15 интенсивности подключены к выходам программного устройства 6, а входы обратных связей - к выходам датчиков 10 и 11 частоты вращения и датчика 7 упругого момента.
Устройство снабжено первым 16, вторым 17 и третьим 18 управляемым трехфазным выпрямителем-инвертором (ВИ), шины переменного тока которых подключены соответственно к статор- ным обмоткам приводной 1 и нагрузоч н/чм гто ном для подчиненных систем регулиооНЯНИПУапг г -тл.
-.v- jci yJiKlPO
вания характере переходных процессов. Использование синхронных машин и передача энергии на постоянном токе снимает ограничение по мощности и частоте вращения испытуемых трансмиссий позволяет испытывать трансмиссии с произвольным передаточным числом.
, 1 З.П. ф-ЛЫ, ft ил.
20
30
15 ной 2 синхронных машин и трехфазной сети, а шины постоянного тока соединены последовательно через ющии реактор 19 с датчиками 20 и 21 напряжений фаз и датчиками 22 и 23 положения синхронньк машин, измерителями 24 и 25 электромагнит;;ого та, активного и коммутирующего пото- косцепления синхронных машин, форми- Рователем 26 заданий, регуля;ораГ 25 .7-32 электромагнитного момента, ак- ле иГ° U потокосцеп- ля 33 °Р« Ровате- управляющих напряжений и сумматором 3.5. Выходы датчиков 8 и 9 токов и датчиков 20 и 21 напря
Гвх аГи подключены к входам измерителей 24 и 25 электоп. магнитного момента, активного и коТ
мутирующего потокосцеплений, соотвёт- 35 ствующие вьпсоды которьп подключены к входам обратных связей регуляторов /-32 электромагнитного момента, активного и коммутирующего потокосцепЛ 6 НИИ,
BPaSf „--™Г™:.„«. lllf.-f.-«
электромагнитного момента, ак- 45 тивного и коммутирующего потокосцеплений, выходы которых подключены соответственно к первому, второму и третьему входам формирователей 33 и 34 управляющих напряжений, четвертые входы которых подключены к выходам датчиков 10 и 11 частоты вращения синхронных машин.
Первые выходы формирователей 33 и J управляющих напряжений через сум- 5 Г° подключены к входу системы J6 управления третьего ВИ 18, вторые вьпсоды первого 33 и второго 34 формирователей управляющих напряжений подключены соответственно к управляющим
0
5
входам систем 38 и 37 управления первым 16 и вторым 17 ВИ, опорные входы которых подключены соответственно к выхрдам датчиков 22 и 23 положения приводной 1 и нагрузочной 2 синхронных машин.
Формирователи 33 и 34 управляющих напряжений содержат блок 39 преобразования переменных, блок 40 измерения скорости изменения углового положения вектора тока статора, блок 41 вычисления составляющих потокосцеплений синхронной машины, элементы 42 и 43 деления и умножения, первый 44 и второй 45 элементы дифференцирования, первый 46, второй 47 и третий 48 сумматоры. При этом вход делимого элемента 42 деления, объединенные входы делителя элемента 42 деления, элемента 43 умножения, блока 41 вычисления составляющих потокосцеплений, блока 39 преобразования переменных, а также второй вход блока 41 вычисления составляющих потокосцеплений и первый вход второго сумматора 47 образуют соответственно первый, второй, третий и четвертый выходы формирователей 33 и 34 управляющих напряжений. Выход элемента 42 деления подключен к объединенным входам первого сумматора 46, блока 41 вычисления составляющих потокосцеплений и блока 39 преобразования переменных, на второй вход которого подается нулевой сигнал. Выход блока 40 измерения скорости изменения углового положения вектора тока статора подключен к входу второго сумматора 47, выход которого соединен с входом элемента 43 умножения. Выход элемента 43 умножения подключен к второму входу первого сумматора 46, третий вход которого через первый элемент 44 дифференцирования соединен с выходом компоненты суммарного пото- косцепления блока 41 вычисления составляющих потокосцеплений, выход компоненты основного потокосцепления которого соединен с третьим входом блока.39 преобразования переменных.
15
выходы тока возбуждения и потокосцепления обмотки возбуждения последнего подключены соответственно к входам тре- ) тьего сумматора 48 непосредственно и через второй элемент 45 дифференцирования, sf Выход первого сумматора 46, выходы гармонических функций блока 39 пре-. образования переменных, объединенные с входами блока 40 измерения скорости
изменения углового положения вектора
тока статора, и выход третьего сумматора 48 образуют соответственно первый, второй и третий выходы фор№1ро- вателей 33 и 34 управляющих напряжений.
В системе автоматического регули- р ования (САР) предлагаемого устройства для испытания механической трансмиссии образованы два канала-регулирования: канал регулирования частоты вращ ения с регулятором частоты вращения и канал регулирования упругого момента с регулятором упругого момента. Регуляторы частоты вращения и упругого момента воздействуют через формирователь заданий на внутренние многомерные контуры регулирования момента синхронных , содержащие регуляторы момента, активного и коммутирующего потокосцеплений синхронных машин. Синтез САР проведен на основе теории нелинейных многосвяз- ньк систем подчиненного регулирования и на основе свойств синхронного двигателя (СД) при питании отзависимого инвертора тока (ЗИТ) и синхронного генератора (СГ), подключенного к трехфазному управляемому ВИ, как объектов автоматического регулирования. Особенностью структуры САР является использование двух систем координат d, q и х, у, жестко связанной с вектором тока i статора (фиг. 4) так, что проекции вектора ig -на оси X, у равны
SX
0;
-sy
1
(1)
Устройство работает следующим образом.
От программного устройства 6 через задатчики 14 и 15 интенсивности на входы регуляторов 12 и 13 частоты вращения и упругого момента поступают сигналы Ijj и М. заданных значений Частоты вращения и упругого момента, где они сравниваются с сигналами действительных значений частоты вращения
Чр
OJ + OOlJL
(2)
поступающими с датчиков 10 и 11 частоты вращения синхронных машин 1 и 2 и упругого момента М vj от датчика 7 упругого момента.
Выходные сигналы М- н М
с выходов регуляторов 12 и 13 частоты вра П1;ения и упругого момента поступают на входы формирователя 26 заданий, который вырабатывает заданные значения электромагнитного момента т и т , активных потокосцеплений и; и Vsxs коммутирующих потокосцеплений ( синхронных машин 1 и 2 таким образом, чтобы обеспечить формирование требуемых характеристик устройства для ,испытания механической трансмиссии, поддержание заданного электромагнитного- состояния синхронных машин (например, t sx (9) устойчивость работы ВИ, работающего в режиме зависимого инвертора тока с заданным углом tP восстановления запирающих свойств вентилей, исключения режима прерывистых токов ВИ, в которых ухудшается управляемость, , плавность перехода синхроннь х машин I из двигательного режима в генератор- ньш и обратно.
Заданные значения то - и то - электромагнитного момента приводной1 и нагрузочной 2 синхронных машин1 и 2 формируется по соотношениям
1
sei
cos
(v
A SX1
f
X
se
v
V,
Se ин
где
мин
co-s g )
Заданные значения электромагнит- , .. „
ных моментов то косцеплений (
SX1
и то, активных пото- и iii и
.
коммутируюсцих потокосцеплении и ( подаются на входы регуляторов 27-32 электромагнитного момента, активных потокосцеплений и коммутирующих потокосцеплений, где они сравниваются с сигналами действительных значений электромагнитных моментов
т и то,
потокосцеплений
Vsxi
() 2 и коммутирующих потокосцепле- mifi Ц др, , Ч зе измерение которых осуществляется на основании сигналов датчиков 8 и 9 токов и датчиков 20 и 21 напряжений фаз, преобразованных к эквивалентной двухфазной систе- ме по соотношениям
S5.A
- 5 8
I .
3 SC
iT| м + м 1 ч
т H S
(3)
Заданные значения ц и зхг активных потокосцеплений формируются по соотношениям
(4)
I
Т
15
I
Т (5)
0
5
0
где I
-Р
- гранично непрерывное значение тока силовой цепи;
I ™ Iмйкс наибольшее по модулю значение из моментов га и га- приводной и нагрузочной машин; УО заданное значение потокосцепления. Заданные значения
V
SEI
ч
sei
J t IJC I.
коммутирующих потокосцеплений синхронных машин формируются по соотношениям
Р сЬ I Р cb-/l sxj
. ir
6 se- s
.H .H
, (6)
Чр - 3 -SB 7з be
Usc Us. - U,, - U,, ;
1
3
j
3
(7)
sp V v5 sc
45
Измерение момента синхронных машин осуществляется по соотношению
™ Vs, S/b isef
(8)
50
55
Потокосцепления статора в двухфазной системе координат определяются с помощью операционных усилителей в режиме интегрирования по соотношениям
Vc.. (V „- i, rj.dt. (9)
s.p
So(,p
-So(,fi -S
Сигналы модуля вектора тока ig статора, гармонические функции его
аргумента sin , cos at , где se угол, определяющий положение оси вектора тока статора относительно оси фазы А статора (фиг. 4) определяются по соотношениям
ig V- i
isa iso(
Sin se. fcos ae. ---, Ь s
Сигналы потокосцепления статора в осях X и у находятся путем реализации преобразования поворота координат на угол s по соотпоюёяиям
Vsx Sef S0 s 5 5 -Vs sinae+ .
(11)
Сигнал коммутирующего потокосцец- ления Ц) определяется по соотношениям
e VL ;
Vs
«I
sa
+ 1
s se
(12)
Регуляторы 27 и 30 электромагнитного момента, регуляторы 28 и 31 активного потокосцепления и регуляторы 29 и 32 коммутирующего потокосцепления имеют передаточные функции, равные.
W (р)
1
()
(13)
где Tjj- постоянная времени, выбираемая в соответствии с требованиями к устройству и определяющая быстродействие системы автоматического регулирования.
Регуляторы моментов, активных и ;коммутирующих потокосцеплений обеспечивают равенство моментов, активных и коммутирующих потокосцеплений синхронных машин их заданным значениям в установившихся реяшмах работы устройства.
Выходные сигналы регуляторов 27 и 30 электрома-гнитных моментов, равные «и , регуляторов 28 и 31 активных потокосцеплений, равные f CXIT и Vsxls регуляторов 29 и 32 коммутирующих потокосцеплений, равные Vsei и Vsez датчиков 10 и 11 частоты вращения синхронных машин, поступают соответственно на первый гчетвертый входы формирователей 33 и 34 управляющих напряжений.
На выходе элемента 42 деления формирователей управляющих напряжений формируется сигнал равный
. , . Ш у S
5X3
.(14)
О На выходе блока 41 вычисления сос- тавпйвщих потокосцеплеНИИ формируются сигналы
V.,j - sf/sj 5 fsev,J- se-4v 5
(15) (16)
Vsvr V-sNi + iss )
4 sen fscD- sx;
,, - i 2
(18) (19)
где Хр и Хр - параметры сглаживающего реактора трехфазного зависимого инвертора то- ,ка и эквивалентной схемы регулируемого источника напряжений.
Блок 39 пре(5бразования переменнЬ1х осуществляет переход от токов igxj О и i потокосцеплений VJlvN и к токам ijofj,
5йЭ fj потокосцеплениям H s. Vs, Vf в осях d и q с учетом вихревых токов и нac ьш eния синхронных мащин. Выходы гармонических функций блока 39 преобразования
переменных подаются на вход блока 40 измерения скорости изменения углового . положения вектора тока статора, на выходе которого формируется сигнал dx/dt в соответствии, например, с
соотношением
d f , . . d 5- - cos at -- (sinjfe) - sina ;-
dt
dt(cos at).(-20)
Ha выходе второго сумматора 47, на входы которого подаются сигналы W частоты вращения синхронной машины и скорости изменения углового положения вектора тока статора, формируется сигнал кия системы координат х, у:
5
скорости враще-К- -k-a1(21)
На выходе сумматора 46, соединенном с первым выходом формирователя 33 или 34 управляющих напряжений с помощью элемента 43 умножения, элемента 44 дифференцирования, формируется сигнал и,, равный
dVsyj
и
Sf RS
dt
+ uj..V
SX3
(22)
где R,
R.
R-P-l-Re.
R
«
r K
сопротивления соответ- стйенно обмотки статора 5 синхронной машины, реактора и эквивалентной схеме третьего ВИ. На выходе сумматора 35, на входы которогб подаются сигналы U,, и U j,, первого выхода формирователей 33 и 34 упрайляющих напряжений, формируется управляющий сигнал U в,, третьего ВИ 18. Сигналы гармонических функ- ций блока 39 преобразования переменных подаются на второй вькод формирователей 33 и 34, управляющих напряжений, и через системы 37 и 38 управления осуществляют управление первым 16 и вторым 17 ВН. Управление первым 16 и вторым 17 ВИ связано с продольной и поперечной оЬями ротора синхронных машин 1 и 2 при помощи датчиков 22 и 23 углового положения так.
Следует, заметить что операции дифференцирования, реализуемые элементами 44 и 45 дифференцирования, выполняются с необходимой точностью, поскольку на входы формирователей 33 и 34, управляющих напряжений поступают сигналы т,, ц, и у. , прошедшие фильтрацию.
Разгон устройства для испытания механической трансмкссии осуществляют с заданным темпом до заданного значения частоты w вращения при режиме (т 0; га 0). Энергия, необхояшая для вращения устройства поступает в этом режиме от третьего ВИ 18. Нагружение испытуемой трансмиссии осуществляют в соответствии с заданной программой после подачи от программного устройства 6 через датчик 15 интенсивности сигнала зада ния упругого момента М. Сигнал задания момента га нагрузочной машины принимает отрицательное значение, в результате чего синхронная машина 2 переводится в генераторный режим. Вследстйие этого синхронная машина
20
25
ич-п г,,. ОТ .-M.-iDnc Jiuju синхронная машина
i Л 2 - вь,раеа.ы.,.ь з„ерг„„. „оруют управляющие импульсы для тиристоров в определенных положениях ротора относительно статора синхронных машин..
- Управляющие сигналы sinae. и cosje изменяют эти угловые положения, определяя тем самым усредненное угловое положение вектора тока статора в системе координат d и q так, что (фиг. 4) выполняются соотношения
:40
торая через второй ВИ 17, работающий в режиме выпрямителя, и первый ВИ 16 работающий в режиме инвертора, поступает в статор синхронного двигателя, а затем в виде механической энергии через испытуег ую трансмиссию 3 возвращается к синхронному, генератору, обеспечивая, взаимную йа грузку син- хронных машин. Третий да,18 компенси- рует электрические и Механические потери синхронных машин. Наличие жесткой отрицательной обратной связи по упругому моменту от датчика 7 упругого момента демпфирует колеба- 50 ния ynpyf-pro моменте, возникакадее при резких изменениях вращения .уст- ройства или момента нагруэк-а.
sd s si ;
s;y S
cos эе .
(23)
На соединенном с третьим выходом формирователей 33 и 34 управляющих напряжений выходе третьего сумматора 48, на входы которого подается сигнал ij и через второй элемент 45 дифференцирования - сигнал (f. с выходов блока 39 преобразования переменных, формируется управляющий сигнал Ujj регулируемых возбудителей
синхронных машин по соотноше
dVfj dt
(24)
0
5
где RO сопротивление обмотки возбуждения синхронной машины.
Следует, заметить что операции дифференцирования, реализуемые элементами 44 и 45 дифференцирования, выполняются с необходимой точностью, поскольку на входы формирователей 33 и 34, управляющих напряжений поступают сигналы т,, ц, и у. , прошедшие фильтрацию.
Разгон устройства для испытания механической трансмкссии осуществляют с заданным темпом до заданного значения частоты w вращения при режиме (т 0; га 0). Энергия, необхояшая для вращения устройства поступает в этом режиме от третьего ВИ 18. Нагружение испытуемой трансмиссии осуществляют в соответствии с заданной программой после подачи от программного устройства 6 через датчик 15 интенсивности сигнала зада- ния упругого момента М. Сигнал задания момента га нагрузочной машины принимает отрицательное значение, в результате чего синхронная машина 2 переводится в генераторный режим. Вследстйие этого синхронная машина
0
5
v-.-M.-iDnc Jiuju синхронная машина
2 - вь,раеа.ы.,.ь з„ерг„„. 2 - вь,раеа.ы.,.ь з„ерг„„. „о0
торая через второй ВИ 17, работающий в режиме выпрямителя, и первый ВИ 16, работающий в режиме инвертора, поступает в статор синхронного двигателя, а затем в виде механической энергии через испытуег ую трансмиссию 3 возвращается к синхронному, генератору, обеспечивая, взаимную йа грузку син- хронных машин. Третий да,18 компенси- рует электрические и Механические потери синхронных машин. Наличие жесткой отрицательной обратной связи по упругому моменту от датчика 7 упругого момента демпфирует колеба- 0 ния ynpyf-pro моменте, возникакадее при резких изменениях вращения .уст- ройства или момента нагруэк-а.
Использование синхронных мащйн и передачи, энергии на постоянном токе Снимает ограничения по мощности и Частоте вращения испытуемых трансмиссий, позволяет испытывать трансмиссии с,произвольным передаточным
числом, что расширяет функциональные возможности устройства,
Фо рмула изобретения
потокосцепления и коммутирующего потокосцепления синхронных машин, выход
0
5
0
5
регуляторов частоты вращения и упругого элемента через формирователь заданий подключены к входам регуляторов .электромагнитного момента, активного потокосцепления и коммутирующего потокосцепления, выходы которых подключены соответственно к первому, второму и третьему входам формирователей управляющих напряжений, четвертые входы которых подключены к выходам датчиков частоты вращения синхронных машин, первые выходы формиро.вателей управляющих- напряжений через сумматор подключены к yпpaвляющe 5y входу системы управления третьим выпрямителем-инвертором, вторые и третьи выходы первого и втор.ого формирователей управляющих напряжений подключены соответственно к управляющим входам систем управления первым и вторым выпрямителем-инвертором, опорные входы которых подключены соответственно к выходам датчиков положения приводной и нагрузочной синхронных машин, а четвертые выходы формирователей управляющих напряжений п одкпючены к входам
возбудителей синхронных машин. I
0
5
0
5
5
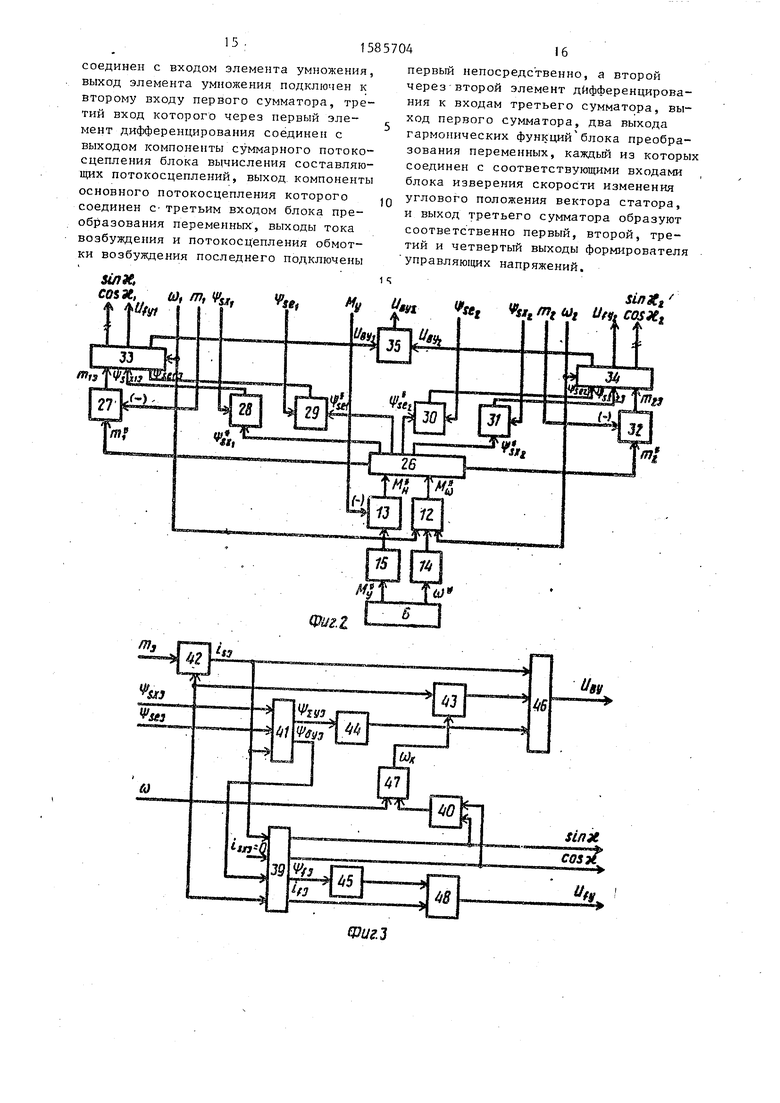
соединен с входом элемента умножения, выход элемента умножения подключен к второму входу первого сумматора, третий вход которого через первый элемент дифференцирования соединен с выходом компоненты суммарного потоко- сцепления блока вычисления составляющих потокосцеплений, выход компоненты основного потокосцепления которого соединен с- третьим входом блока преобразования переменных, выходы тока возбуждения и потокосцепления обмотки возбуждения последнего подключены
siffse.
cos ас, &}, /77, V,., i/fift
первый непосредственно, а второй через второй элемент дифференцирования к входам третьего сумматора, выход первого сумматора, два выхода гармонических функций блока преобразования переменных, каждый из которых соединен с соответствующими входами блока изверения скорости изменения углового положения вектора статора, и выход третьего сумматора образуют соответственно первый, второй, третий и четвертый выходы формирователя Управляю1цих напряжений.
и,
Ufy COfXg
изв
ФигМ
