Изобретение относится к радиотехнике и может быть.использовано в аппаратуре для контроля электрических параметров интегральных схем. Цель изобретения - повьшение надежности контактирования.
На Фиг. 1 изображена зондовая головка, общий вид5 на Фиг. 2 -блок-схема ее управления, на Лиг. 3 - осциллограммы напряжений при различных режимах работы устройства.
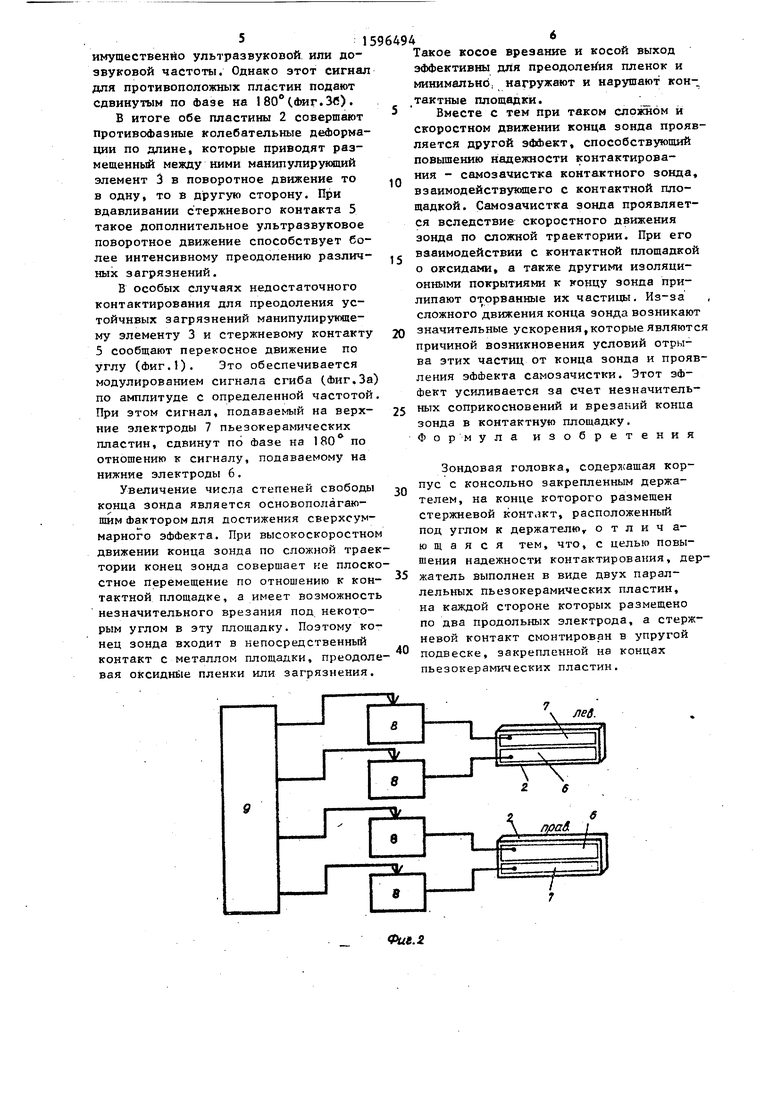
Зондовая головка содержит закрепленный в корпусе 1 держатель, выполненный в виде двух параллельно распо- 15 ложенных пьезокерамических пластин 2, установленньш поперек между ними манипулирующий элемент 3, например текстолитовый или бакелитовый цилиндр, связанный с и ьшжней частями пластин 2 в отдельности посредством упругой подвески 4, например металлических пальцев из пружинной стали, а также стержневой контакт 5, закреплен ный соосно. с манипулирующим элементом н поперек по отношению к пьезокерамическим пластинам-2. Манипулирующий элемент 3 изготавливают из материала, обладающего электроизоляционными свойствами и вибропропускно способностью, в частности из тексто.лита, бакелита и т.д. . Пьезокерамические пластины 2 обращены одна к другой своими электродными сторонами, причем на каждой сто роне образовано по два продольных электрода (нижний 6 и верхний 7). Электрическая часть, обеспечивающая работу зондовой головки, состоит из отдельных блоков 8 питания, управляемых микропроцессором 9, кото рый содержит ци(Ьроаналоговыё преобразователи (Фиг.2). Зондовая головка работает следующим образом. Для проведения контрольных измерений проверяемых схем 10 зондовые головки- Скак правило, две) перемета ются позиционирующим устройством по заданной команде по отношению к проверяемой схеме 10. Проанализируем работу одной зондовой головки. - После установки зондовой головки в требуемое положение она подводитс к проверяемой схеме 10. Для этого держатели стержневого контакта 5 Пьезокерамические пластины 2, подвергаются сгибу. С этой целью к об им парам верхних электродов 7 и ниж
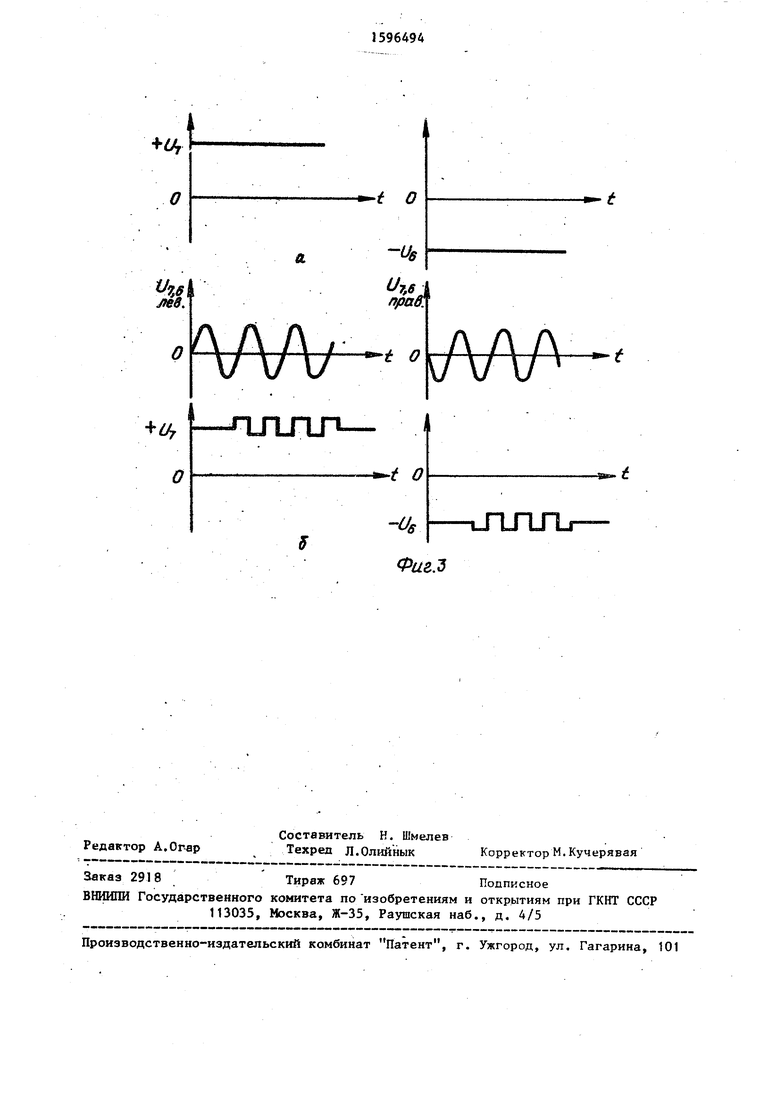
них электродов 6 подается постоянное напряжение, но противоположного зна.ка (фиг.За), что обеспечивает деформации удлинения верхних частей обеих пьезокерамических пластин 2 и деформации стягивания их нижних продольных половин (частей). Следовательно, обе пластины 2 сгибаются вниз (пунк тирная линия на Фиг.1), а вместе с ними опускается и закрепленный на конце манипутгирующий элемент 3, который вдавливает в контактную площадку схемы 10 стержневой контакт 5. Упругость вдавливания обуславливается упругостью подвески 4, при помощи которой манипулирующий элемент 3 прикреплен к пьезокерамическим пласти.нам 2. При использовании пьезокераМИКИ типа ЦТС, длина пластин которых 50-60 мм, ширина 8-10 мм, достигается амплитуда опускания 0,1-0,2 мм. Отвод манипулирующего элемента 3 со стержневым контактом 5 осуществляется путем отключения сигналой питания. Это обеспечивается с помощью микропроцессора 9, управляющего блоками 8 питания, число которых равно числу пьезоактивных участков пьезокерамических пластин 2, В данном случае в каждой пьезокерамической пластине 2 существует по два - верхний и нижний - пьезоактивных участка, соответствующих верхним 7 и нижним 6 электродам. В случае отсутствия или недостаточности электрического контакта при соприкосновении стержневого контакта 5 с проверяемой схемой 10 зондовая головка обеспечивает повторное вдавливание этого контакта, одновременно сообщая ему дополнительные движения, в частности поворотное вокруг своей оси и перекосное. Это обеспечивает более интенсивное преодоление случайных заносов, препятствующих надежному контактированию. С этой целью одновременно с подачей на пластины 2 электрических сигналов, обеспечивающих их сгиб и подвод стержневго контакта 5 к проверяемой схеме 10, от блоков питания подается дополнительное электрическое питание. Для осуществления вращения манипулирующего элемента 3, а следовательно, и стержневого контакта. 5 к обеим пьезокерамическим пластинам 2(ко всем их электродам 6 и 7) подается переменный электрический сигнал преимущественйо ультразвуковой или дозвуковой частоты. Однако этот сигнал для противоположных пластин подают сдвинутым по фазе на I 80 (Фиг.ЗС) . В итоге обе пластины 2 совершают противофазные колебательные деформации по длине, которые приводят размещенный между ними манипулирукяций элемент 3 в поворотное движение то в одну, то в другую сторону. При вдавливании стержневого контакта 5 такое дополнительное ультразвуковое поворотное движение способствует более интенсивному преодолению различных загрязнений. В особых случаях недостаточного контактирования для преодоления устойчнвых загрязнений манипулирующему элементу 3 и стержневому контакту 5 сообщают перекосное движение по углу (Фиг.1). Это обеспечивается модулированием сигнала сгиба (Фиг,За по амплитуде с определенной частотой При этом сигнал, подаваемый на верхние электроды 7 пьезокерамическик пластин, сдвинут по Фазе на 180 по отношению к сигналу, подаваемому на нижние электроды 6. Увеличение числа степеней свободы конца зонда является основополагающим Фактором для достижения сверхсуммарного эффекта. При высокоскоростно движении конца зонда по сложной трае тории конец зонда совершает ке плоск стное перемещение по отношению к кон тактной площадке, а имеет возможност незначительного врезания под некоторым углом в эту площадку. Поэтому ко нец зонда входит в непосредственный контакт с металлом площадки, преодол вая оксидн1)1е пленки или загрязнения. 1 Такое косое вреэашге и косой выход эффективны для преодоле ия пленок и минимально, нагружают и нарушают кон- тактные площадки. Вместе с тем при таком слозкном и скоростном движении конца зонда проявляется другой эффект, способствующий повышению надежности контактирования - самозачистка контактного зонда, взаимодействукяцего с контактной площадкой. Самозачистка зонда проявляется вследствие скоростного движения зонда по сложной траектории. При его взаимодействии с контактной площадкой о оксидами, а также другими изоляционными покрытиями к концу зонда прилипают оторванные их частицы. Из-за сложного движения конца зонда возникают значительные ускорения,которые являются причиной возникновения условий отрыва этих частиц от конца зонда и проявления эффекта самозачистки. Этот эффект усиливается за счет незначительных соприкосновений и врезаний конца зонда в контактную площадку, Формула изобретения Зондовая головка, содержащая корпус с консольно закрепленным держателем, на конце которого размещен стержневой контакт, расположенный под углом к держателю,, о т л и ч аю щ а я с я тем, что, с целью повыщения надежности контактирования, держатель выполнен в виде двух параллельных пьезокерамических пластин, на каждой стороне которых размещено по два продольных электрода, а стержневой контакт смонтирован в упругой подвеске, закрепленной на концах пьезокерамических пластин.
t
-ЛЛГиг-
Uj
о
-Us
Фаг.ъ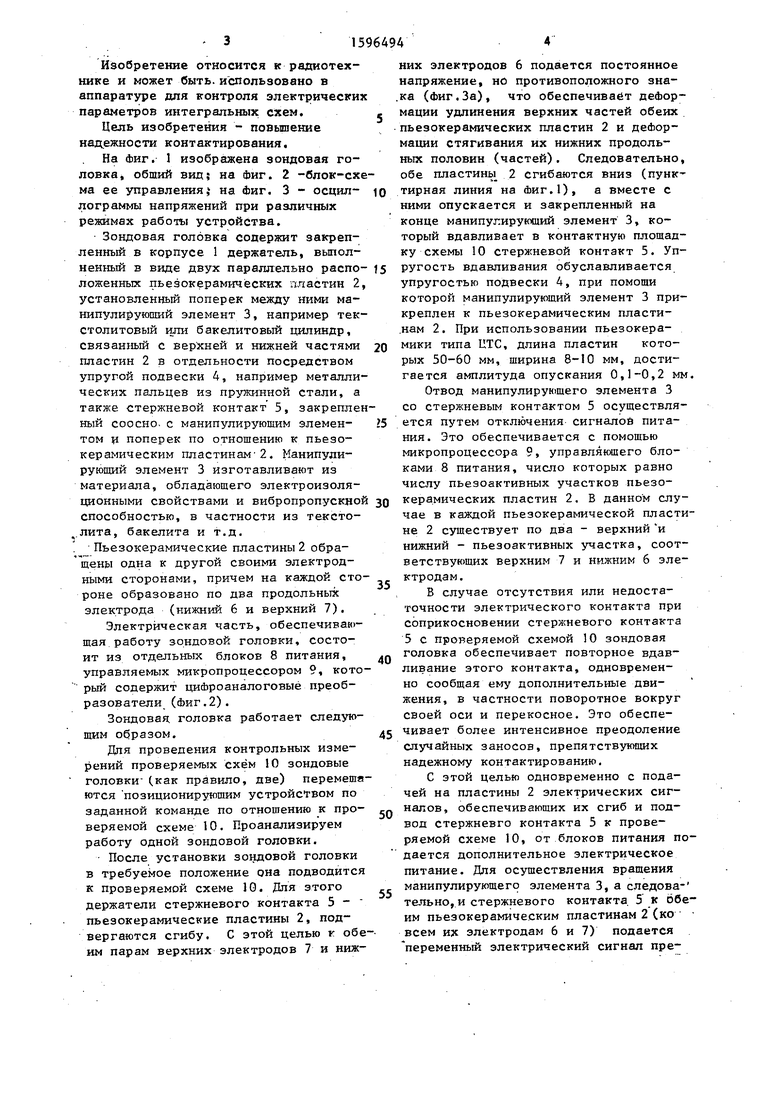
| название | год | авторы | номер документа |
|---|---|---|---|
| Контактное устройство преимущественно для устройств контроля печатных плат | 1984 |
|
SU1228310A1 |
| Способ контроля печатных плат | 1987 |
|
SU1506600A1 |
| ЗОНД НА ОСНОВЕ ПЬЕЗОКЕРАМИЧЕСКОЙ ТРУБКИ ДЛЯ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2005 |
|
RU2300150C1 |
| Устройство для контроля печатных плат | 1984 |
|
SU1262749A1 |
| Устройство для контроля | 1978 |
|
SU746967A1 |
| Устройство для измерения электрических параметров интегральных схем | 1980 |
|
SU906045A1 |
| Зондовое устройство | 1988 |
|
SU1649691A1 |
| Устройство для контроля контактирования в зондовых установках | 1982 |
|
SU1102062A2 |
| ЗОНДОВАЯ ГОЛОВКА | 1990 |
|
RU2035131C1 |
| МНОГОКОНТАКТНЫЙ ЗОНД ДЛЯ ИСПЫТАНИЯ ПЛАНАРНЫХ ЭЛЕМЕНТОВ ИНТЕГРАЛЬНЫХ СХЕМ | 2005 |
|
RU2293339C1 |
Изобретение относится к радиотехнике и может быть использовано в аппаратуре для контроля электрических параметров интегральных схем. Цель изобретения - повышение надежности контактирования. Точный подвод стержневого контакта 5 к контролируемому изделию 10 осуществляется изгибом пьезокерамических пластин 2. Для этого к обеим парам верхних электродов 7 и парам нижних электродов 6 подается постоянное напряжение противоположного знака. Для зачистки зоны контактирования на электроды подается переменный электрический сигнал. При этом конец стержневого контакта 5 описывает сложные пространственные кривые. 3 ил.
