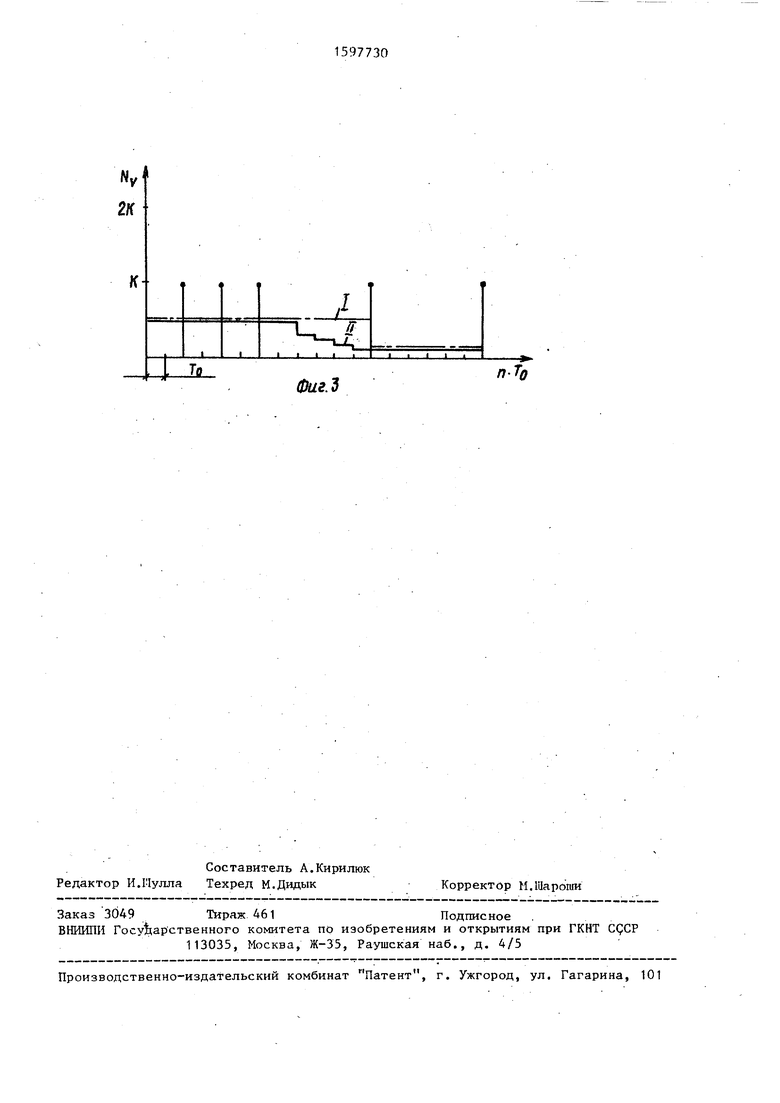
чины предыдутчего, то с данного такта генератора эталонной частоты и до прихода импульса датчика в каждом такте скорость определяется по текущему значению интервала измерения. В противном случае значение скорости определяется по числу импульсов гене- ратора эталонной частоты в момент прихода импульса тахогенератора. Таким образом, при снижении скорости и увеличении последуюР1его интервала измерения значение скорости может быть получено с большей динамической точностью до прихода следующего импульса от датчика, что уменьшает величину запаздывания сигнала скорости и снижает динамическую погрешность измерения.
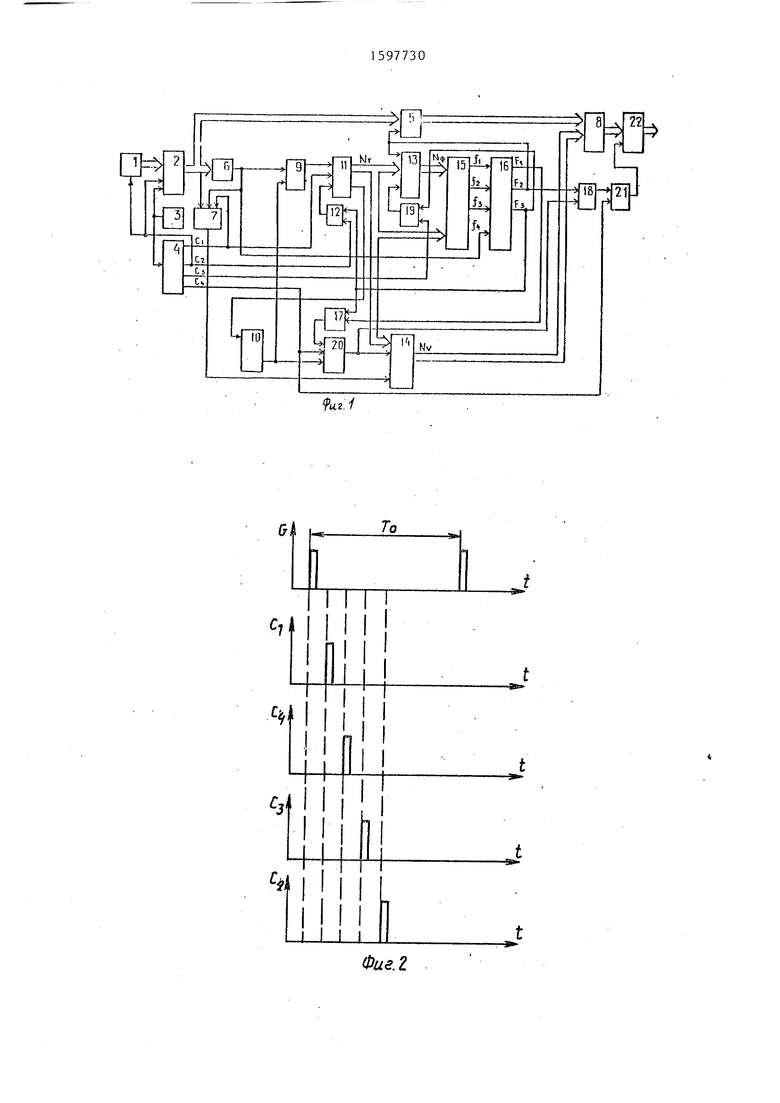
На фиг. 1 показана структурная схема устройства для осуществления предлагаемого способа; на фиг. 2 - временные диаграммы синхроимпульсов; на Лиг, 3 - временные диаграммы работы устройства по известному (l) и предлагаемому (II) способам.
Устройство для измерения скорости/, перемещения (фиг. 1) содержит импульс Hbtfi датчик .1, первьй регистр 2, генератор 3 эталонной частоты, ключ 5,
определите ль 7 знака, вторую схему ИЛИ 8, вторую схему ИПИ-НЕ 9, триг- , гер 1П, счетчик 11 первую схему И 12, второй регистр 13, блок 14 памяти, блок 15 компараторов, блок 16 управления, третью 17 и четвертую 18 схемы ИЛИ, вторую 19 и третью 20 и четвертую 21 схемы И, третий регистр 22.
На фиг. 1 С - 4 логические переменные соответственно на первом, втором, третьем, четвертом выходах блока 4 синхронизации; f - f 2 - логические функции на первом, втором, третьем выходах блока 15 компараторов; f логическая функция на выходе первой схемы ИЛИ 6; F - F . - логические функции на первом, втором, третьем, четвертом выходах блока 16 управления; код текущего значения интервала измерения; N ф- код заЛиксированного предыдущего интервала измерения; код скорости; N а - код на вькоде датчика 1.
Устройство работает следующим образом.
10
15
блок 4 синхронизации, первую схему ИЛИ ,6,
15977304
В исходном состоянии в регистре 13 записан код максимально возможного интервала измерения, триггер 10 сброшен, на его выходе присутствует уровень логического нуля, счетчик 11 и регистры 2 и 22 обнулены. В момент времени, определяемый периодом Т, генератора 3 эталонной частоты, информация с датчика 1 импульсов в параллельном коде переписывается в первый регистр 2, выходы которого объединены схемой. ИЛИ 6. Если во всех разрядах регистра.2 логические нули, то на выходе схемы ИЛИ-НЕ 9 появится уровень логической единицы, который поступит на синхронизирукшщй вход счетчика 11. Через интервал времени, необходимый для завершения переходных процессов в указанных блоках, на счетньп вход счетчика 11 пррпсодит импульс С с блока 4 синхронизации. В счетчике 11 формируется текущее.. значение интервала измерения, которое поступает на первый информационный вход блока компараторов, на второй вход которого с регистра 13 поступает информация о значении предыдущего интервала измерения. В начальный момент работы устройства это значение не определено и поэтому задается максимально возможным. На выходах блока 15 компараторов формируются значения ло ги че с ких фу НК;ЦИЙ
20
25
30
35
40
если NT- NAJ
если N, N
ь.,
ГП Ь,
г 1, «ели N. 0; 1о, ее
если NT- ксли NT
Ф
Nf;
45
50
:СЛИ NT 0. .
Логиче9кая функция i: принимает значение eдиниlI l, если на выходе датчика 1 присутствует нен.улевая информация (N о 0) .
Значения f , f анализируются блоком 16 управления на выходах которого формируются логические функции
f, f.
Г
F7 РЭ
f.; f.
55
Логическая функция Fj разрешает (при F, 1) выборку и перенос кода из блока 14 памяти в регистр 22. Логическая фун кция Fj разрешает перенос кода из регистра 2 в регистр 22 т разрешает перено.с кода из счетчика 11 в 13. Последовательность
5
0
если NT- NAJ
если N, N
ь.,
ГП Ь,
г 1, «ели N. 0; 1о, ее
если NT- ксли NT
Ф
Nf;
5
0
:СЛИ NT 0. .
Логиче9кая функция i: принимает значение eдиниlI l, если на выходе датчика 1 присутствует нен.улевая информация (N о 0) .
Значения f , f анализируются блоком 16 управления на выходах которого формируются логические функции
f, f.
Г
F7 РЭ
f.; f.
5
Логическая функция Fj разрешает (при F, 1) выборку и перенос кода из блока 14 памяти в регистр 22. Логическая фун кция Fj разрешает перенос кода из регистра 2 в регистр 22 т разрешает перено.с кода из счетчика 11 в 13. Последовательность
выполнения этих переносов обеспечивается блоком 4 синхронизации.
После первого (с момента прихода импульса с датчика 1) такта генератора эталонной частоты происходит Увеличение содержимого счетчикА 11 на единицу, а состояние остальных блоков остается без изменения. Подоная ситулция повторяется в каждом такте генератора -3 до момента прихода импульса с датчика 1 когда на выходе схемы ИЛИ 6 устанавливается уровень логической единицы, вследствие чего запрещается счет импульс счетчиком 11 и завершается формирование кода интервала измерения. На- выходах блока 15 компараторов значения f 0; на выходах блока F,
f
16 1; F, О
пульс с,
, - U j J- 3 - произведет
скорости N из ячейки памяти блока 14 соответствуюр;ей коду интервала измерения
т
и пересылку кода N в
регистр 22. Импульс Cj осуществит перенос кода N из счетчика 11 в регистр 13, зафиксировав новый текугр1й интервал измерения N, импульс С сбросит в нулевое состояние регистр 2 и счетчик 11, подготовив их к новому 11;иклу измерения.
С этого момента устройство полностью готово /у1я работы по предлагаемому способу измерения.
14 памяти записакоды скорости соотношения
N
V
о пр ед е ля е мые
N
К
где
V К NT +
1
к
коэффициент пропорциональноти. При измерении угловой скорости
2
до-Т о
где
д. число импульсов на оборот датчика. Адресуемое пространство блока 14 памяти состои из двух страниц, соответствующих положительным и отрицательным значениям скорости. Переходом со страницы на страницу управляет определите
7знака в соответствии со знаком скорости. При уменьшении измеряемой скорости до нуля код в счетчике .11 увеличивается до N ако соответ- ствуюр их ячейках блока 14 памяти записываются нулевые коды скорости.
8следз ющем такте генератора 3 эта0
лонной частоты счетчик 11 переполняется, на его соответствуюием выходе появляется импульс, которьй устанавливает триггер 10 в единичное состояние, и дальнейпмй счет импульсов счетчиком 11 запрещается схемой ИЛТ-НЕ 9. Перевод устройства из данного состояния осуществляется сигналом Пуск (не показан), которьш устанавливает все блоки в исходное состояние.
Устройство сохраняет работоспо- . собность и в том случае, когда часто- C та обновления информации на выходе
датчика 1 выше частоты генератора 3. : в этом pexJiMe работы устройства выборка Из блока 14 памяти не осуществляется, открывается ключ 5 и параллель- 0 HbDi код скорости с выхода первого регистра 2 записьтается через ключ 5 и первые входы схемы ИПИ 8 в регистр 22 в каждом такте генератора 3.
В качестве импульсного датчика 1 5 используется фотоэлектрический датчик- скорости с параллельным кодовым вьгхо- дом. В нижнем диапазоне частот вращения в младшем разряде выхода датчика появляется уровень логической единшц с периодичностью, пропорциональной периоду оборота или перемеп;е- ния. В этом случае датчик представляет собой датчик импульсов и устройство работает по предлагаемому способу. При увеличении скорости перемещения в старших разрядах на выходе датчика появляются уровгш логических единиц и устройство осуществляет сквоз ной перенос параллельного кода с датчи- регистр 22.
0
5
0
ка 1 на
Формула, изобр
е т е н и я
45
50
55
1. Способ измерения скорости перемещения путем подсчета числа импульсов генератора эталонной частоты в интервале времени между двумя опорными импульсами, поступающими от датчика, отличающийся тем, что,, с целью повьппения динамической точности измерения, дополнительно в момент прихода импульса датчика фиксируют -величину интервала измерения, а в каждом такте генератора эталоной частоты сравнивают значение текущего интервала измерения с зафиксированной величиной предыдутцего интервала измерения ,и, если до прихода импульса датчика значеш е текущего интервала
измерения достигает величины предыдущего интервала измерения, то с данного такта генератора эталонной частоты и в каждом из последующих скорость определяется по значению текущего интервала измерения.
2. Устройство для измерения скорости перемещения, содержащее импульсный датчик, генератор эталонной часто- .Q ты, счетчик, ключ, блок памяти и регистр, отличающееся тем, что, с целью повьшения динамической точности и расширения диапазона изме- - рения, в него дополнительно введены j
второй и третий регистры, блок синхронизации, четыре схемы ИЛИ, определитель знака, схема ИЛИ-НЕ, триггер, четыре схемы И, блок компараторов и блок управления, причем выход импульс-- ,ного датчика соединен с первым вхо- Ттом первого регистра, выход которого соединен с первым входом ключа, с первым входом определителя знака И с . входом первой схемы ПТИ, выход кото- 25 рой соединен со вторым входом, определителя знака и с первым входом схемы ИЛИ-НЕ, второй вход которой соединен с выходом триггера, а выход - с первым входом счетчика, второй Q вход которого соединен с третьим входом определителя знака и с первым выходом блока синхронизаисии, вход которого соединен со вторым входом первого регистра и с выходом генератора эталонной частоты, второй выход блоки синхронизации соединен со входом импульсного датчика, с -третьим входом первого регистра и с первым входом первой схемы И, выход которой соединен с третьим входом счетчика, первый выход которого соединен с первым входом второго регистра, с первым входом блока компараторов и с
1597730 8
первым входом блока памяти, выход которого соединен с первым входом второй cxeMi i ИЛИ, второй вход которой соединен с выходом ключа, а выход- с первым входом третьего регистра, выход которого является выходом устройства, при этом выход второго регистра, соединен с вторым входом блока компараторов, первый, второй и третий выходы которого соединены соответственно с первым, вторым и третьим входами блока управления, чет- вертный вход которого соединен с выходом первой схемы ИЛИ, при этом пер- вьпЧ вход блока управления соединен с первым входом третьей схемы ИЛИ, второй выход блока управления соединен с вторыми входами ключа и второго регистра и с первым входом четвертой схемы ИЛИ, третий выход блока управления соединен с вторыми входами первой и третьей схемы ИЛИ и с первым входом второй схемы И, второй вход которой соединен с третьим выходом блока синхронизадаи, а выход - с третьим входом второго регистра, причем четвертый выход блока синхрони-. зации соединен с первыми входами третьей и четвертой схем И, второй вход третьей схемыЦ соединен с выходом третьей схемы ИЛИ, а третий вход третьей схемы И - с выходом триггера, вход которого соединен со.вторым выходом счетчика, при этом выход третьей сх.емы И соединен со,вторым входом блока памяти и со вторым входом -четвертой .схемы ИЛИ, выход которой соединен со вторым входом четвертой схемы И, выход которой соединен со вторым входом третьего регистра, при этом выход определителя знака соединен с третьим входом блока памяти.
35
40
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗВЕЩАТЕЛЬ В.И. ЯЦКОВА С ЁМКОСТНЫМ И ЛУЧЕВЫМ СРЕДСТВАМИ ОБНАРУЖЕНИЯ | 2017 |
|
RU2697617C2 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1982 |
|
SU1101866A1 |
| Устройство формирования и регистрации путевых параметров для управления шахтной подъемной установкой | 1989 |
|
SU1835383A1 |
| САМОНАСТРАИВАЮЩЕЕСЯ ЦИФРОВОЕ СГЛАЖИВАЮЩЕЕ УСТРОЙСТВО | 2017 |
|
RU2665906C1 |
| Цифровое устройство управление весовым дозированием | 1980 |
|
SU866418A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| АДАПТИВНОЕ ЦИФРОВОЕ СГЛАЖИВАЮЩЕЕ УСТРОЙСТВО | 2017 |
|
RU2665908C1 |
| Устройство для стабилизации скорости электропривода | 1987 |
|
SU1474765A1 |
| Устройство для моделирования синусно-косинусного трансформаторного датчика угла | 1990 |
|
SU1778766A1 |
| СПОСОБ И УСТРОЙСТВО КОРРЕКЦИИ ПОГРЕШНОСТЕЙ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ | 2007 |
|
RU2352060C1 |
Изобретение относится к измерительной технике и может быть использовано в число-импульсных системах измерения скорости автоматизированных электроприводов станков с программным управлением и промышленных роботов. Цель изобретения - повышение динамической точности и расширение диапазона измерения. В способе дополнительно в момент прихода импульса тахогенератора фиксируют величину интервала измерения и в каждом такте генератора эталонной частоты сравнивают значение текущего интервала измерения с величиной зафиксированного интервала измерения. Значения скорости определяют по числу импульсов генератора эталонной частоты и соотношению зафиксированного и текущего интервалов измерения. Устройство, реализующее способ, содержит датчик импульсов, генератор эталонной частоты, счетчик, блок управления, четыре схемы И, схему ИЛИ-НЕ, триггер, блок памяти, четыре схемы ИЛИ, три регистра, блок компараторов, блок синхронизации, определитель знака. 2 с.п. ф-лы, 3 ил.
Фие.г
Ну
2К
| Герман-Галкин С | |||
| Г | |||
| и др | |||
| Т иЛро- вые электроприводы с транзисторными преобраяпвателями | |||
| - Л.: Зне.ргоатом- издат, 1986, с | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Цифровой измеритель скорости перемещения | 1984 |
|
SU1315905A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
