.3
S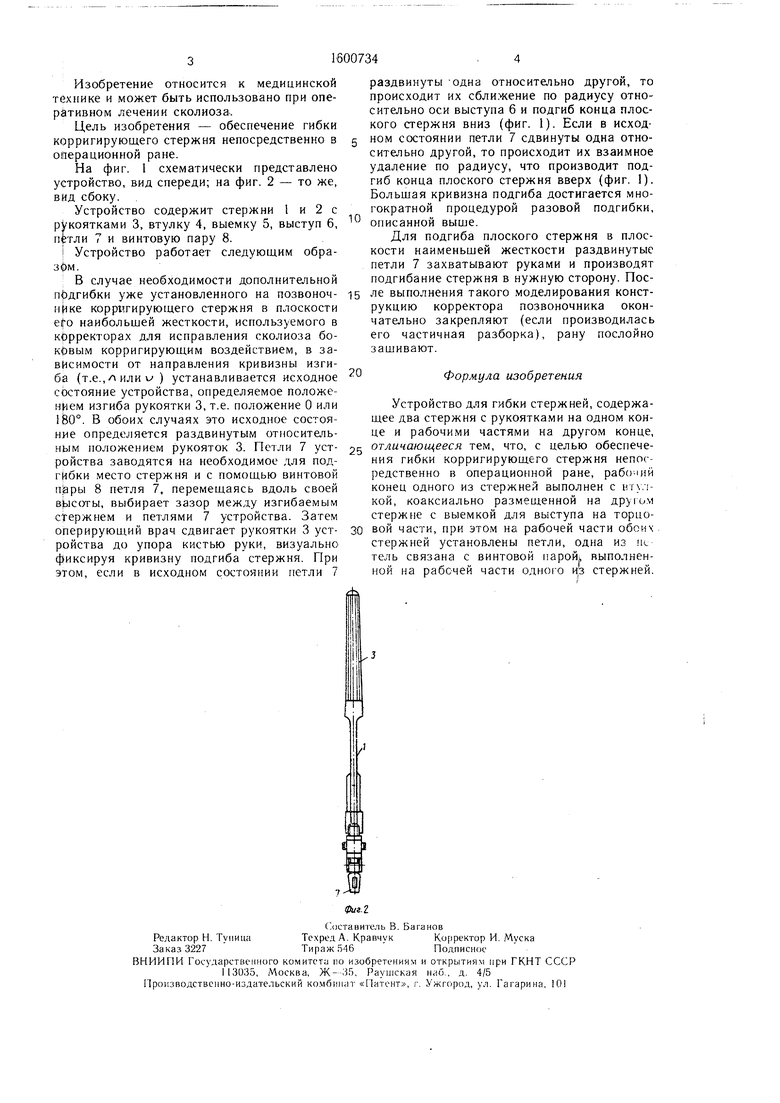
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНСТРУМЕНТ ДЛЯ ОБРАБОТКИ КОНЦОВ СПИЦ В ОПЕРАЦИОННОЙ РАНЕ | 2000 |
|
RU2189192C2 |
| УСТРОЙСТВО ДЛЯ ЗАГИБАНИЯ СПИЦ | 1999 |
|
RU2164785C1 |
| СПОСОБ ХИРУРГИЧЕСКОЙ КОРРЕКЦИИ И СТАБИЛИЗАЦИИ ПОЗВОНОЧНИКА И СТЕРЖНЕВАЯ СИСТЕМА ДУЛАЕВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2086200C1 |
| Набор инструментов для проведения транспедикулярной фиксации позвоночника с моделированием стержней и фиксацией транспедикулярных и стопорных винтов | 2023 |
|
RU2808116C1 |
| Устройство для захвата спинального межтелового имплантата цилиндрической формы | 2022 |
|
RU2798674C1 |
| МЕЖТЕЛОВОЙ ИМПЛАНТ ДЛЯ СТАБИЛИЗАЦИИ ШЕЙНОГО ОТДЕЛА ПОЗВОНОЧНИКА И УСТРОЙСТВО ДЛЯ ЕГО УСТАНОВКИ | 2020 |
|
RU2778201C2 |
| УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ ДЕФОРМАЦИИ ПОЗВОНОЧНИКА | 1996 |
|
RU2129844C1 |
| Инструмент для изгибания балок при проведении транспедикулярной фиксации | 2023 |
|
RU2810365C1 |
| Устройство для лечения искривлений позвоночника | 1985 |
|
SU1454432A1 |
| Способ лечения сколиотической деформации позвоночника у детей и устройство для его осуществления | 1990 |
|
SU1814887A1 |
Изобретение относится к медицинской технике. Целью изобретения является обеспечение гибки корригирующих стержней непосредственно в операционной ране. Устройство выполнено в виде двух шарнирно связанных стержней 1 и 2 с петлями, охватывающих изгибаемый стержень. 2 ил.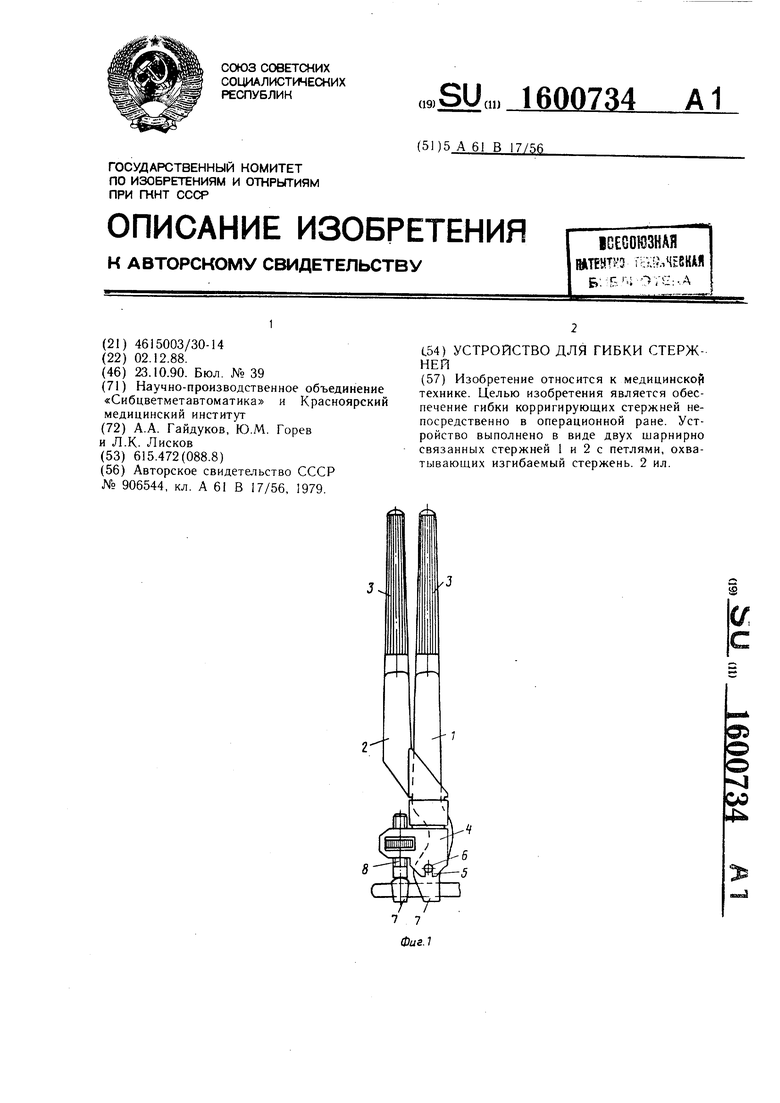
00 4
Изобретение относится к медицинской технике и может быть использовано при оперативном лечении сколиоза.
Цель изобретения - обеспечение гибки корригирующего стержня непосредственно в операционной ране.
На фиг. 1 схематически представлено устройство, вид спереди; на фиг. 2 - то же, вид сбоку.
Устройство содержит стержни 1 и 2 с рукоятками 3, втулку 4, выемку 5, выступ 6, петли 7 и винтовую пару 8.
i Устройство работает следующим обра- зЬм.
в случае необходимости дополнительной подгибки уже установленного на позвоночнике корригирующего стержня в плоскости eiTo наибольшей жесткости, используемого в корректорах для исправления сколиоза бо- К0ВЫМ корригирующим воздействием, в зависимости от направления кривизны изгиба (т.е.,лилии ) устанавливается исходное состояние устройства, определяемое положением изгиба рукоятки 3, т.е. положение О или 180°. В обоих случаях это исходное состояние определяется раздвинутым относительным положением рукояток 3. Петли 7 устройства заводятся на необходимое для подгибки место стержня и с помощью винтовой п|ары 8 петля 7, перемещаясь вдоль своей выс(л-ы, выбирает зазор между изгибаемым ctepжнeм и петлями 7 устройства. Затем оперирующий врач сдвигает рукоятки 3 устройства до упора кистью руки, визуально фиксируя кривизну подгиба стержня. При этом, если в исходном состоянии петли 7
раздвинуты -одна относительно другой, то происходит их сближение по радиусу относительно оси выступа 6 и подгиб конца плоского стержня вниз (фиг. 1). Если в исходном состоянии петли 7 сдвинуты одна относительно другой, то происходит их взаимное удаление по радиусу, что производит подгиб конца плоского стержня вверх (фиг. 1). Больщая кривизна подгиба достигается многократной процедурой разовой подгибки, описанной выще.
Для подгиба плоского стержня в плоскости наименьщей жесткости раздвинутые петли 7 захватывают руками и производят подгибание стержня в нужную сторону. Пос5 ле выполнения такого моделирования конструкцию корректора позвоночника окончательно закрепляют (если производилась его частичная разборка), рану послойно зашивают.
0
20
Формула изобретения
Устройство для гибки стержней, содержащее два стержня с рукоятками на одном конце и рабочими частями на другом конце,
отличающееся тем, что, с целью обеспечения гибки корригирующего стержня непосредственно в операционной ране, рабо- нй конец одного из стержней выполнен с irry. i- кой, коаксиально размещенной на другом стержне с выемкой для выступа на торцовой части, при это.м на рабочей части обоих стержней установлены петли, одна из не тель связана с винтовой парой;, выполненной на рабочей части одного и:з стержней.
| Устройство для гибки штифтов | 1980 |
|
SU906544A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
