Изобретение относится к области автоматизации контроля состояния ме- хаютзмов и может быть использовано в . автоматизированных системах диагностирования оборудования технологических агрегатов.
Целью изобретения является расширение функциональных возможностей и повышение точности диагностирования.
На фиг.1 представлена блок-схема устройства для автоматического сбора и обработки диагностической информации о составлении оборудования;, на фиг.2 - функциональная схема блока аналогово-цифровых преобразователей; на фиг.3 - Функциональная схема блока сдвигающих реестров; на фиг.4 - функциональная схема блока отметки времени; на фиг.5 - блок-схема блока регистрации параметров предаварийной си- туаште,- на фиг.6 - функциональная схема блока управления; на фиг.7 - функциональная схема тактового рас- пределителя и диаграмма ее работы.
Устройство (фиг.1) содержит датчики 1 диагностических параметров, блоки 2 нормализации, блок 3 ключей, блок 4 обработки сигналов, блок 5 индикации, схему 6 определения ситуации диагностирования, блок 7 ввода уста- вок, блок 8 аналого-цифровых преобразователей (АЦГТ), блок 9 сдвигающих регистров, схему 10 перезаписи, блок 11 регистров, компаратор 12, блок 13 цифроаналоговых преобразователей (ДАЛ), блок 14 регистрации информации о параметрах пред -варийной ситуа- ;ции, блок 15 управленля, блок 16 от1600883
iметки времени, блок 17 формирования сигнала аварийной си туации, схему 18 управления приводом, которая реализуется типовой станцией тиристорного электропривода.
Схема управления приводом представляет собой, как правило, станцию тиристорного управления приводом, которая содержит узлы зашиты комплектного i тиристорного электропривода (двигате- 1 ля, оперативйой,и силовой цепей). Работа устройства осуществляется 1 следукнцим образом.
i При возникновении ситуации диаг- : ностирования, условием которой, на- 1 пример, для прокатного стана является наличие признака входа металла в вал- ки, на выходе схемы 6 определения ситуации диагностирования появляется сигнал, который, поступая на управляющие входы блока 3 1слючей, разреша- ет прохождение сигналов датчиков 1 : диагностических параметров, предварительно нормализованных в блоках 2 нормализахщи.
Сигналы каждого-измерительного ка- нала диагностических параметров по- стуйают на входы блока 4 обработки сигналов и блока 8 АЦП.. В блоке 4 об работки сигналов сигналы диагностических параметров подвергаются фильтрации и допусковому контролю по уставкам, задаваемым; с блока 7 ввода уставок, и результаты анализа и контроля индицируются блоком 5 ивдикации Одновременно сигналы с выхода блока 3 ключей поступают на входы блока 8
АЦП.
Функциональная схема блока 8 АЦП
(фиг.2) содержит нуль-орган 19, выполняющий сравнение значения сигнала на информадаонном входе U и компенсирующего сигнала U, источник 20 опорного напряжеш-ш Е, цифровой де-
литель напряжения,-состоящий из блоков 21 сопротивления и блока 22 клю- . чей, блока 23 цифрового автомата, который реализует алгоритм уравновешивания, и генератора 24 тактовых импульсов (ГТИ), синхронизирующего работу всех узлов блока 8.
Блок 8 работает следующим образом . По сигналу Запуск из блока 15 управления осуществляется сброс тригеров блока 23 цифрового автомата и на выходе блока сопротивлений напря жение UK устанавливается равным 0. Под воздействием импульсов ГТИ 24 и с5
0
Q
25
.
35
40
50
. 55гналов нуль-органа 19 блок цифрового автомата выполняет переключение ключей блока 22 ключей. В результате переключений напряжение U ступенчато изменяется. Переключение (уравновещи- вание) прекращается тогда, когда на- пряжедая Ux и U, на :входе нуль-органа 19 станут равными, т.е. U - U 0. В этот момент на выходе блока 23 цифрового автомата вырабатывается сигнал Конец цикла, который подается на первьш выход АЦП 8, соединенный с входом блока 15 управления.
Преобразованные в даФровую форму сигналы диагностических параметров по каждому ь аналу измерения поступают на группу вторых входов блока. 9 сдвигающих регистров.
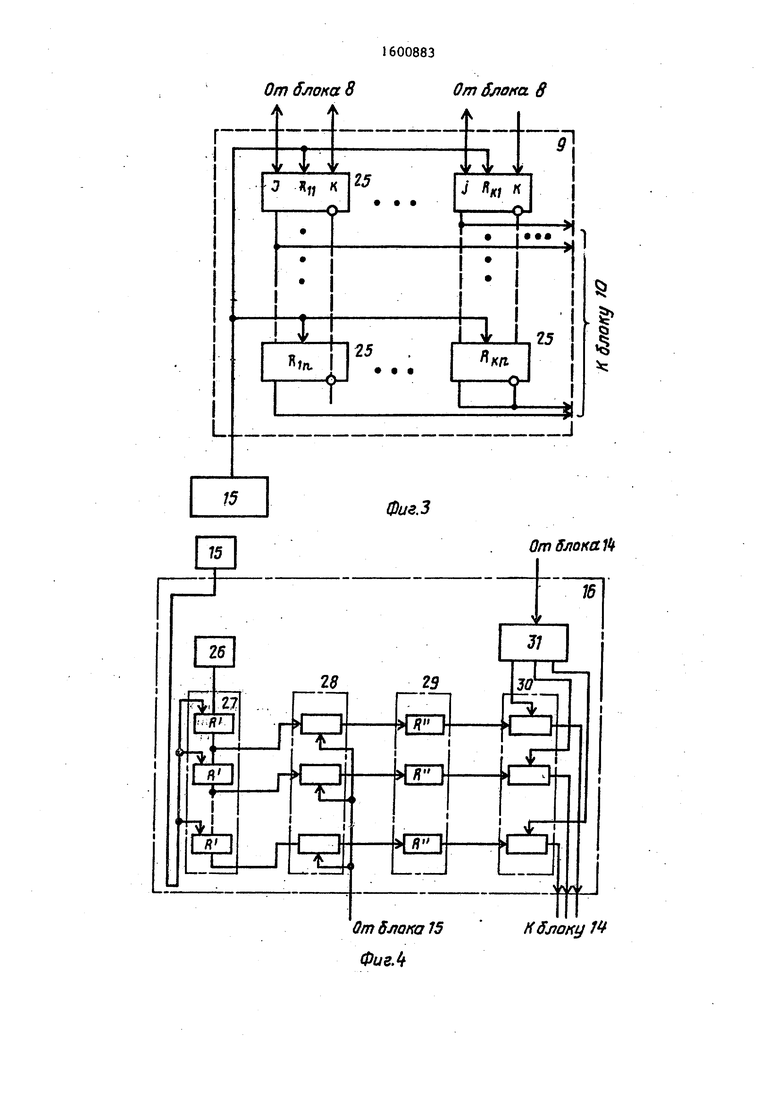
На фиг.З показана реализация блока 9 сдвигающих регистров на базе однотипных парафазных регистров 25, построенных на основе j+k-триггеров. Все разряды регистра (столбцы) соединены последовательно, а тактирующие входы всех разрядов объединены на общую шину, на которую поступают тактовые сигналы из блока 15,управления. Каждый импульс тактовый обеспечивает перезапись каждого разряда в столбцах (по вертикали) на одну строку.Так как перенос в каждом из девяти столбцов аналогичен, то при каждом тактирующем импульсу в блоке 9 сдвигающих регистров осуществляется перенос строки (информации) о единичном замере значения диагностируемого пара- метра на строку ниже. По тому же сигналу Сдвиг осуществляется.и перенос по вертикали в сдвигающих регистрах блока 16 отметки времени (фиг.4), которые аналогичны регистрам блока 9.
Блок 16 отметки времени (фиг.4) содержит датчик 26 времени, блок 27 сдвигающих регистров времени, коммутатор 30 и блок 31 тактового распределителя .
Так как сдвиг информации о казвдом измерении значения диагностируемого параметра в блоке 9 и текущего значения времени в блоке 16 осуществляется по одному и тому же сигналу и число строк в матрице сдвигающих регистров в блоках 9 и 16 одинаковое, то осуществляются привязка каждого значения времени к измеренному в зтот момент диагностическому параметру и их синх- ро шзация при перезаписи с одной : строки на другую.
Каждый поступающий импульс Сдвиг обеспечивает сдвиг кода числа в регистре блока 9 (текущее значение диагностического параметра) и регистра блока 16 (текущее значение времени) на одну строку вниз. Количество импульсов тактового распределителя для полного сдвига с первой строки до списания равно п, т.е. глубине памяти текущей ситуации. После п импульсов информация с последней строки списывается, а в первой строке в это время появляются новое значение диагностируемого параметра (в блоке 9) и .те5сущее значение времени (в блоке 15)
Диагностические характеристики агрегата определяют необходимую частот тактовых импульсов, например для прокатного стана она составляет 10 кГц.
Глубина предыстории аварийной ситуации в условиях прокатного стана составляет 2-7 с, определяет количество регистров в каждой группе блоков 9 сдвигающих регистров. В каждой группе сдвигающих регистров по сигналу тактового иьтульса осуществляются сдвиг информации по регистрам и запись нового текущего значения. Информация в последнем R,, регистре, выходящая за пределы заданной глубины диагностирования, списывается и заполняется новой.
В возникновения аварийной ситуа1щи (аварийная ситуация формируется по инициативе срабатывашш защит главных приводов или по сигналам предельных значений диагностических . параметров, например, уровня вибрации, синтезируется схемой ИЖ) из схемы 18 управления приводом на вход блока 17 формирования сигнала аварийной ситуации поступает сигнал, по которому формируется сигнал аварийной ситуации, который поступает на третий вход блока 15 управления. По этому сигналу в блоке 15 формируются управляющие сигналы, которые с его- четвертого и пятого выходов поступают на управляющ11е входы соответственно блока 10 перезаписи и блока 16 отметки времени.
По этому сигналу информагция с каждого регистра через схему перезаписи переписывается в блок 11 регистров. С выхода блока 11 регистров информационные сигналы поступают на вход коммутатора 12, на управляющие входы которого поступают тактовые импульсы блока 14 регистрации информации о параме1Т)ах предаварийной ситуации. По сигналам блока 14 регистрации информации осуществляется переключение j ключей коммутатора. После каждого импульса на выход коммутатора поступает очередной информационный сигнал о значении диагностируемого параметра.
0 Преобразованный в блоке 13 ЦАП сигнал поступает на вход блока 14 регистра- Ц11и информации.
Блок 14 регистрации параметров предаварийной ситуации представляет
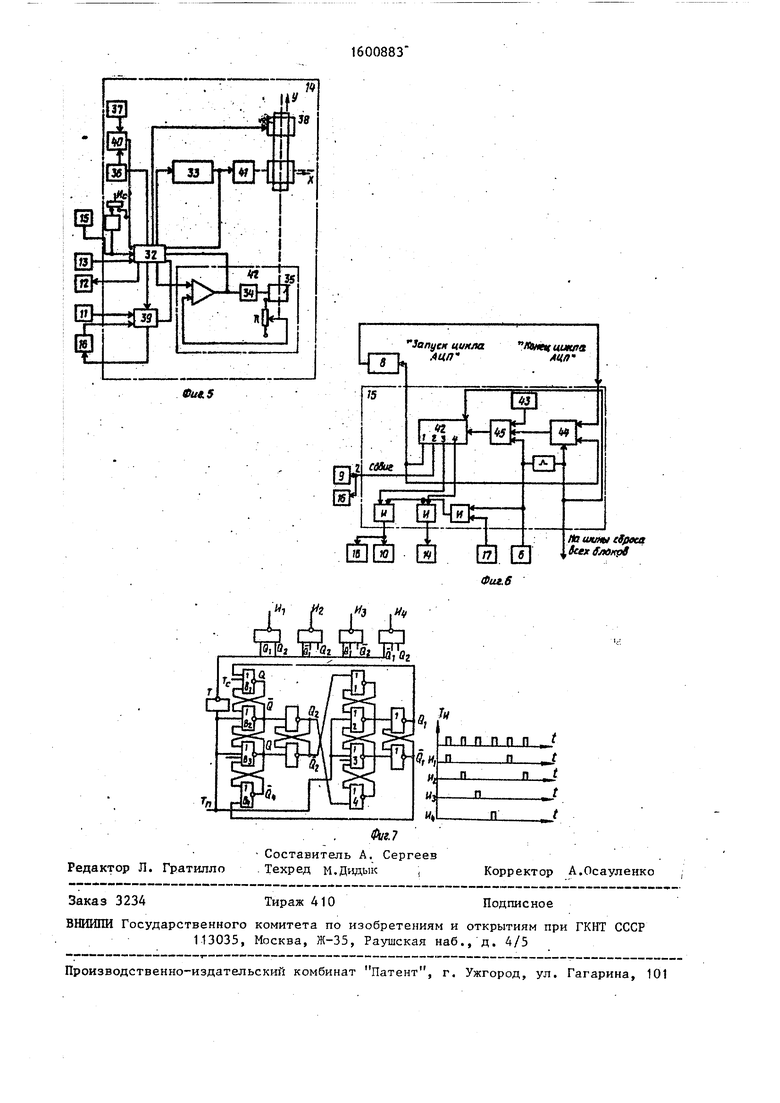
5 . собой двухкоординатный графопостроитель и цифропечатающее устройство. Блок-схема блока.14 (фиг.5) содержит - блок 32 управления (БУ), блок 33 управления шаговым двигателем (БУЩЦ),
0 двигатель 34, редуктор 35, счетчик
36, задатчик 37, регистрирующий электрод (РЭ) 38, блок 39 печати протокола, схему 40 совпадения, шаговый двигатель 41, систему 42 слежения (СС).
5 Работа блока осуществляется следующим образом. После возникновения аварийной ситуации и перезаписи информации о текущем времени, аварии в блок 16 отметки времени и значения
Q диагностируемого параметра в предава- рийлой ситуа14ии в блок 9 блок 39 печати протокола блока 14 по каждому тактовому импульсу осуществляет печать протокола предаварийной ситуации, который имеет вид
5
0
XX XX XX XX ХХХХХ
ч мин с мс значение парамет- XX ра XX ХХХХХ ХХХХХ
5
0
5
Построение графика осуществляется по сигналу, поступающему на вход блока 33 управле шя шаговым двигателем 1ЦЦ 41, который срабатывает по каждому тактовому импульсу слежения на один шаг. При этом по оси X смещения каретки, на которой установлен РЭ 38, после каждого Щага на вход БУ 32 поступает преобразованное в блоке 13 ЦАП значение диагностируемого параметра, которое, поступая на вход СС 42, отрабатывается ею и РЭ 38 устанавливается по оси Y пропорционально значению диагностируемого параметра с дискретной во времени. С БУ 32 в этот момент подается импульс на включение РЭ 38. ЦЦ 41 срабатьшает еди10
20
ничное перемещение по оси X, а по входу от блока 13-поступает следующее значение диагностируемого .параметра, которое отрабатывается СС 42 и регистрируется РЭ 38. Таким образом, отрабатьшаются все п точек значений диагностируемого параметра в предава- рийной ситуации,
После поступления на вход блока 14 управляющего импульса с блока 15 управления в блоке управления графопостроителем формируется последовательность управляющх импульсов, которые управляют работой коммутатора 12,|с
блоком 39 печати протокола, который состоит из буферных устройств приема информации о значениях диагностируе- могхэ параметра, поступающего с блока 11, и времени возникновения аварийной ситуации, поступающего с блока 16, и БУ 32, который управляет вводом указанной информации в буферные устройства и .управляет работой электромагнитов цифропечати, кроме того, с бло- 25 ка 32 управления печатью выдаются сигналы обратной связи -0 Завершение печати строки протокола и Конец цикпа.
БУ 32 осуществляет синхронизацию Q работы всего блока 14 регистрации о параметрах предаварийной ситуации. На его вход поступают сигналы из блока 15 управления, которые инициируют работу блока 14.
По этому сигн алу начинается построение графика. Сигналы обратной связи о завершении движения по осям X и Y, поступая на вход БУ 32, совместно с сигналом со схемы 40 совпадения участвуют в формировании очередного импульса на включение РЭ 38 и на включение на один шаг ШД 41, включение которого осуществляется до тех пор, пока число включений ЩЦ, за- фиксированное счетчиком 36 не совпадает с кодом числа, задаваемого за- датчиком 37, значение которого равно п - числу строк (глубина памяти) сдвигающих регистров, где хранится информация о значениях диагностичес ких параметров в предаварийной ситуации. После совпадения кода числа за- датчика и счетчика работа блока 14 прекращается до следующей аварийной ситуации или до следующего инидаатив- 55 ного сигнала на работу блока 14.
Блок-схема бл-ока 15 управления (фиг.6) работает следующим образом.
40
, 50
10
20
,
|с
25
Q
- -в- 55
40
50
После возникнове шя ситуации диагностирования сигнал с блока 6 определения ситуации диагностирования по- .. ступает на первый вход блока 15 управления, сбрасывает все триггеры устройства для автоматического сбора и обработки диагностической информации в исходное состояние, разрешает прохождение первого импульса ГТИ 43 на вход блока 42 тактового распределителя .
Первый импульс с блока 42 тактового распределителя Запуск цикла АЦП инициирует работу блока 8 А1Щ и запрещает через триггер 44 и схему И 45 поступление импульсов ГТИ 43 на вход блока 42 тактового распределителя до появления сигнала Окончание цикла АЦП от блока 8, который сбрасывает триггер 44 в исходное состояние. Импульсы ГТИ 43, поступая на вход блока 42 тактового распределителя, иниции- руют вьщ,ачу на его выходах сигналов, .инициирующих Сдвиг (второй выход), перезапись (третий выход), инициативного сигнала на печать протокола и построение графика в блоке 14. Причем появление сигналов на выходе, инициирующих работу блоков 16, 10 и 14 возможно только в случае возникновения аварийной ситуации. В случае отсутствия сигнала Аварийная ситуация тактовый блок тактового распределителя вьдаст только импульсы на Сдвиг информации в блоках 9 и 16. Функциональная схема блока 42 тактового распределителя и диаграмма ее работы приведена на фиг .7. Схема выполнена на двух RS-триггерах.
Блок-схема блока 16 отметки времени (фиг,4) состоит из блока 27 сдвигающих регистров R, -R)j , датчика 26 времени, коммутатора 30, блока 31 тактового распределителя.
Таким образом, применение предлагаемого устройства позволяет автоматически осуществлять сбор и регистрацию диагностической информации о состоянии технологического оборудования, г.то позволяет расширить функциональные возможности и повысить точност.ь диагностирования.
Формула изобретения
Устройство для автоматического сбора и обработки диагностической информации о состоянии оборудования.
содержащее датчики диагностических пар.аметров, блоки нормализации, блок ключей, блок обработки сигналов, бло ввода уставок, блок ивдикации, схему определения ситуации диагностирования, схему управления приводом, причем датчики диагностических параметров подсоединены на соответствующие входы блоков нормализации, вькоды которых подсоединены на информационные входы блока ключей, на управляющие входы которого подсоединен выход схемы определения ситуации диагностирования, выходы блока ключей подсоединены на первые входы-блока обработки сигналов, на вторые входы которого подсоединен блок ввода уставок, выход блока обработки сигналов подсоединен на вход блока индикации, отличающееся тем, что, с целью расширения функциональных возможностей и повышения точности диагностирования, оно снабжено блоком аналого-цифровых преобразователей, блоком сдвигаю1цих регистров, блоком управления, блоком формирования сигнала аварийной ситуации, вход которого соединен со схемой управления приводом,схемой перезаписи,блоком регистров, коммутатором, блоком отметки времени, блоком цифроаналоговых преобразователей и блоком регистрации параметров предварительной ситуации, причем выходы блока ключей и через информационный вход блока аналого- цифровых преобразователей подсоединены к входам соответствующей группы
1600883
10
to
15
25
20
30
5
блока, сдвигающих регистров, выходы которого подсоединены к информацион-. ным входам схемы перезаписи, выходы которого соединены с входами блока регистров, выходы которого подсоединены к первой группе входов блока - :регистрации параметров предаварий- ной ситуации и к входам коммутатора, выходы которого через блок цифроана- логовьрс преобразователей подсоединен к второй группе информационных входов блока регистрацш параметров предварительной ситуации, к третьей группе информационных входов которого подсоединен выход блока отметки времени, управляющие выходы блока регистрации параметров предаварийной ситуации подсоединены к управлякяцим входам коммутатора и первому входу блока отметки времени, первый вход блока управления подсоединен к выходу схемы определения ситуации диагностирования, к второму входу - выход блока аналого-цифровых преобразователей, к третьему входу - выход блока формирования сигнала аварийной ситуации, первый выход блока управления подсоединены к управляющим входам блока аналого-цифровых преобразователей, второй выход - к входам блока сдвигающих регистров, третий выход - к входам блока регистрации параметров предаварийной ситуа- ции, четвертый выход - к входу блока отметки времени и пятый выход - к входу схемы перезаписи.
фиг.1



| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И ИССЛЕДОВАНИЯ АВАРИЙНЫХ И ПРЕДАВАРИЙНЫХ СОСТОЯНИЙ РАЗЛИЧНЫХ КОНСТРУКЦИЙ | 1994 |
|
RU2082145C1 |
| Устройство для мониторинга силовых трансформаторов | 2021 |
|
RU2779269C1 |
| Способ диагностирования состояния технического объекта с выбросами параметров и устройство для его осуществления | 1988 |
|
SU1573461A1 |
| Способ дистанционной диагностики механического транспортного средства | 2015 |
|
RU2615806C1 |
| Устройство для диагностирования логических узлов | 1979 |
|
SU892447A1 |
| Устройство для диагностики неисправностей цифровых блоков | 1981 |
|
SU1024925A1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕГИСТРАЦИИ ДАННЫХ, ДИАГНОСТИКИ ТЕХНИЧЕСКОГО И ФИЗИЧЕСКОГО СОСТОЯНИЯ КОМПЛЕКСА "ЧЕЛОВЕК - МАШИНА" | 2014 |
|
RU2602350C2 |
| Устройство для диагностики и прогнозирования отказов | 1989 |
|
SU1629898A1 |
| Устройство тестового диагностирования оборудования узлов коммутации с программным управлением | 1986 |
|
SU1327319A1 |
| РЕГИСТРАТОР ПАРАМЕТРОВ АВАРИЙНЫХ СИТУАЦИЙ В ЭЛЕКТРИЧЕСКИХ СЕТЯХ | 2008 |
|
RU2381549C2 |

Изобретение относится к автоматизации и может быть использовано в автоматизированных системах технического диагностирования оборудования технологических агрегатов. Цель изобретения - расширение функциональных возможностей устройства и повышение точности диагностирования. Поставленная цель достигается тем, что устройство обеспечивает автоматический сбор и регистрацию диагностической информации о состоянии технологического оборудования до аварии и представляет ее для анализа после момента аварии. 7 ил.
Фиг.2
От блока 8
Отклика в
ОтблокаЧ
От блока 15 Фиг.
Н блоку /4
ФилУ
. . Фиг.7
Составитель А. Сергеев Редактор Л. Гратилло .Техред м.Дидык ,
Заказ 3234
Тираж 410
ВНИШШ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Запуея цимла Лдма ииюга АЦП ЛИЯ
Па еУрасв tcexSMKpe
Корректор А.Осауленко
Подписное
| Способ контроля состояния рабочих лопаток турбомашины | 1978 |
|
SU700795A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ диагностики зубчатыхпЕРЕдАч и уСТРОйСТВО для ЕгООСущЕСТВлЕНия | 1979 |
|
SU808896A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ определения параметров колебаний рабочих лопаток турбомашины | 1973 |
|
SU862014A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления тиристорным преобразователем | 1978 |
|
SU752744A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ автоматического управления процессом диагностирования оборудования прокатного стана и устройство для его осуществления | 1984 |
|
SU1158267A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
