Ияобретение относится к подт емно- транспортному маишностроению, п частности к пассажирским конвейерам.
Цель изобретения - повышение надежности путем обеспечения равномерного распределения нагрузки между бегунками ступени,.
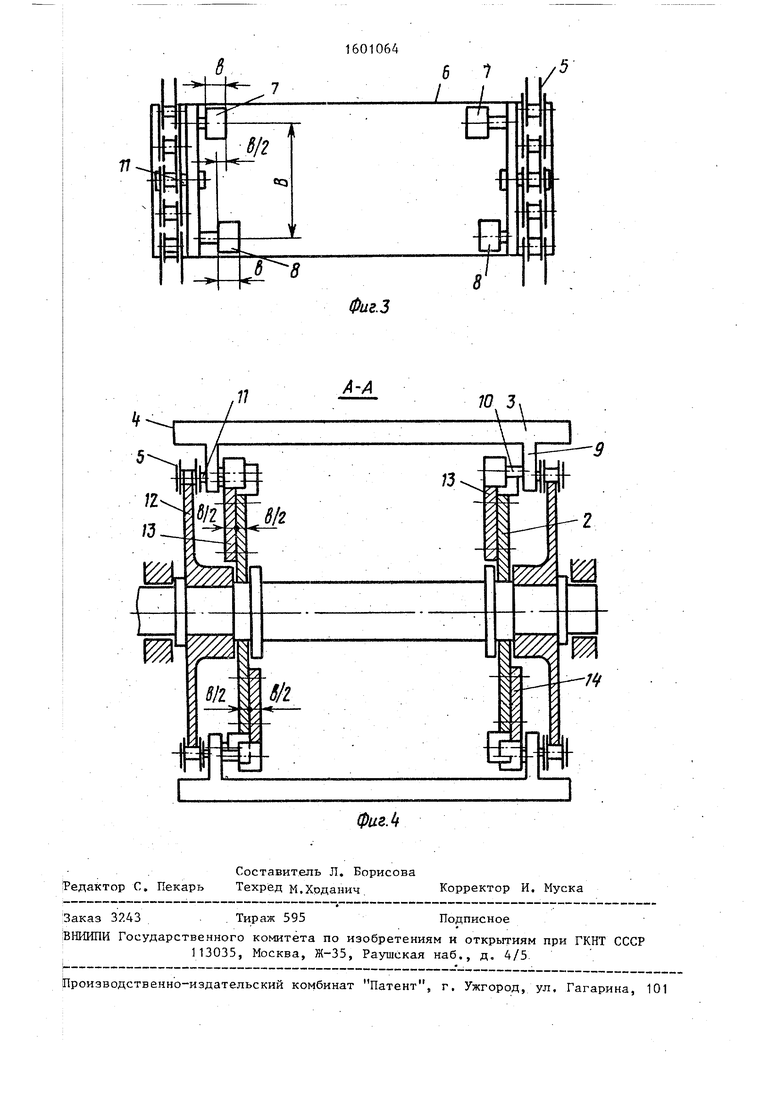
На фиг. 1 схематично представлена трасса конвейера; на фиг. 2 - то же, разреэ по продольной оси (концевая зона); на фиг. 3 - то же, вид на ступень со стороны бегунков; на фиг о - - разрез А-А на фиг. 2.,
Конвейер содержит состыкованные между собой прямолинейные направля- йгще пути 1j и расположенные в концевых зонах конвейера криволинейные направлялацие .пути 2, образугогше полуокружности., Ходовое полотно конвейера состоит из ступеней 3, имеюи1их боковые стороны 4, присоединенные к тяговым цепям 5, и торцовые стороны 6, расположенные по ходу движения ступени. Ступени 3 снабжены парами бегунков 7 и 8, установленных с каж- дои торцовой стороны 6 ступени 3, при этом каждая пара бегунков 7 смещена вдоль их геометрической оси относительно другой пары бегунков 8 на половину ширины Ь/2 обода бегунка Бегунки 7 и 8 смонтированы на ступенях 3 посредством закрепленных: на кронштейнах 9 ступени п олуосей 10 и расположены под ступенью 3 в промежутке между кронштейнами 9., Ступени 3 с помощью закрепленных на кронштейнах 9 между парами бегунков 7 и 8 полуосей 11 присоединены к тяговым цепям 5, В концевых зонах конвейера . установлены звездочки J., на которые замкнуты тяговые цепи 5. На криволинейных направляюр1;их путях 2 в каждой из половин полуокружности с противоположных боковых сторон установ- лены дополнительные криволинейные направляюгцие 13 и 14, одним концом соединенные со стыком направляющих путей 1 и 2, а другим концом - с криволинейным направляющим путем 2. Дополнительные криволинейные направляющие 13 и 14 установлены в .соответствии со смещением пар бегунков 7 и -8 ступени 3 - одна в верхней половине полуокружности, а другая в нижней, а радиус кривизны этих направляющих 13 и 14 всегда меньше радиуса кривизны криволинейных направляюпщх путей 2, Ширина криволинейных направляюрсих путей 2 и пмрина дополнительных криволинейных направляющих 13 и 14 выбрана равной половине ширины Ь/2
обода бегунков 7 и 8, а. ступени 3
оперты на нап завляюпще пути 2 и дополнительные криволинейные направляющие 13 и 14 половиной ширины обода бегунков 7 и 8.
Конвейер работает следующим образом.
До начала контакта места закрепления ступени 3 и 11,епи 5 со звездочкой 12 бегунки 7 и 8 катятся по прямолинейным направляю1тим путям 1. После прохождения места закрепления ступени 3 к цепи 5 вертикальной оси аа звездочки 12 бегунки 7 или Я (в зависимости от направления движения ступеней 3), первыми проходящие место стыка путей 1 и 2, продолжают свое движение половиной ширины обода бегунка 7 или 8 по дополнительной криволинейной направляющей 13 и 14 до тех пор,
пока вторая пара бегунков этой же ступени не достигнет м.еста стыка путей 1 с 2. С этого момента бегунки катятся.по криволинейным на- правляюи1им путям 2 половиной пшри ойода (один из которых 8 катится наружной половиной ширины обода по отношению к ступени, а другой 7 - внутренней половиной). Это движение продолжается во второй половине полуокружности криволинейных направляющих путей 2 до достижения впереди идущим бегунком 7 или 8 (в зависимости, от направления движения ступени) соответствующего стыка криволинейных направляюшзих путей 2 с прямолинейными путями 1. После выхода бегунка, идущего впереди, на прямолинейные направляю цие пути 1 задний бегунок переходит свободной половиной пшрины обода на соответствующие дополнительные направляюпдае 13 или 14, обеспечивая тем самым прижатие впереди идущих бегунков 7 или 8 к прямолинейным направлягопщм путям 1« Таким образом, ступень 3 движется
до пересечения местом закрепления ступени 3 к цепи 5 полуосью 11 вертикальной оси аа звездочки 12 с одновременньм прохождением заднего бегунка 7 или- 8 места стыка путей 2
с путями 1. После этого ступени 3 продолжаются катиться пд прямолинейным направляющим путям 1 до противоположной концевой зоны, где происходит
их аналогичное обкатывание по криволинейным направляющим путям 2 и дополнительным направляющим 13 и 14.
Формула изобретения
Пассажирский конвейер, содержащий состыкованные между собой прямолийей- ные направляюпще пути и расположенные в концевых зонах конвейера криволинейные направляюв1ие пути в форме полуокружности, установленные с каждой торцовой стороны ступени пары бегунков, смонтированные на криволинейных и прямолинейных направляюпшх пути, отличающийся тем, что, с целью повышения надежности путем обеспечения равномерного, распределения нагрузки между deryHKaNm ступени, пара бегунков одной из торцовых сторон ступени смещена вдоль их оси относительно пары бегунков другой торцовой стороны ступени на половину ширины обода бегунка, при этом конвейер снабжен размещенными на криволинейных направляющих путях
д в каждой из половин JIoлyoкpyжнocти с противоположных их сторон дополнительными криволинейными направляющими, ОДНИ1-Ш концами соединенными со стыком прямолинейного и криволиней ного направляю1яих путей, а другими кoнцa п - с криволинейным направля- -ющим путем, причем радиус кривизны дополнительных направляющих меньше радиуса кривизны направляющих путей.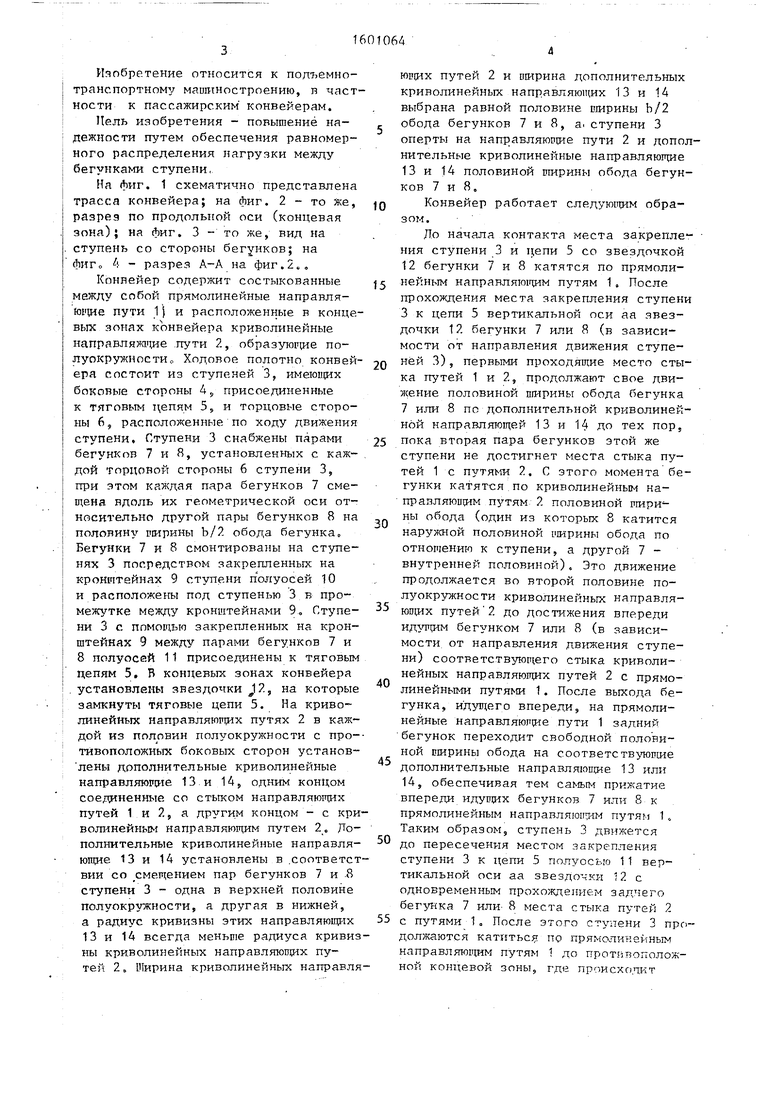

| название | год | авторы | номер документа |
|---|---|---|---|
| КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2001 |
|
RU2206486C1 |
| Концевое криволинейное направляющее устройство для вспомогательных бегунков эскалатора | 1985 |
|
SU1306879A1 |
| Гусеничный привод конвейера | 1981 |
|
SU1028570A1 |
| Транспортная система для кольцевой подачи грузов | 1983 |
|
SU1183221A1 |
| ЗАБОЙНЫЙ СКРЕБКОВЫЙ ЗАРУБНОЙ КОНВЕЙЕР | 2014 |
|
RU2574090C1 |
| КРИВОЛИНЕЙНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2001 |
|
RU2207971C2 |
| Устройство для изгиба става ленточного конвейера | 1974 |
|
SU527352A1 |
| ВЫЕМОЧНО-ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ПОДЗЕМНЫХ РАБОТ | 2009 |
|
RU2410539C1 |
| КРИВОЛИНЕЙНЫЙ МНОГОПРИВОДНОЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2001 |
|
RU2209167C2 |
| ГИБКИЙ БУНКЕР | 2004 |
|
RU2337047C2 |
Изобретение относится к подъемно-транспортному машиностроению, в частности к пассажирским конвейерам. Цель изобретения - повышение надежности путем обеспечения равномерного распределения нагрузки между бегунками ступени. Конвейер содержит состыкованные между собой прямолинейные направляющие пути 1 и расположенные в концевых зонах конвейера криволинейные направляющие пути 2, образующие полуокружности. Ходовое полотно конвейера состоит из ступеней 3. Ступени 3 снабжены парами бегунков 7 и 8, установленных с каждой торцовой стороны 6 ступени. Пара бегунков 7 смещена вдоль их геометрической оси относительно другой пары бегунков 8 на половину ширины обода бегунка. На криволинейных направляющих путях 2 в каждой из половин полуокружности с противоположных боковых сторон установлены дополнительные криволинейные направляющие 13 и 14, одним концом соединенные со стыком направляющих путей 1 и 2, а другим концом - с криволинейным направляющим путем 2. Направляющие 13 и 14 установлены в соответствии со смещением пар бегунков 7 и 8 - одна в верхней половине полуокружности, а другая в нижней. Радиус кривизны направляющих 13,14 меньше радиуса кривизны криволинейных направляющих путей 2. 4 ил.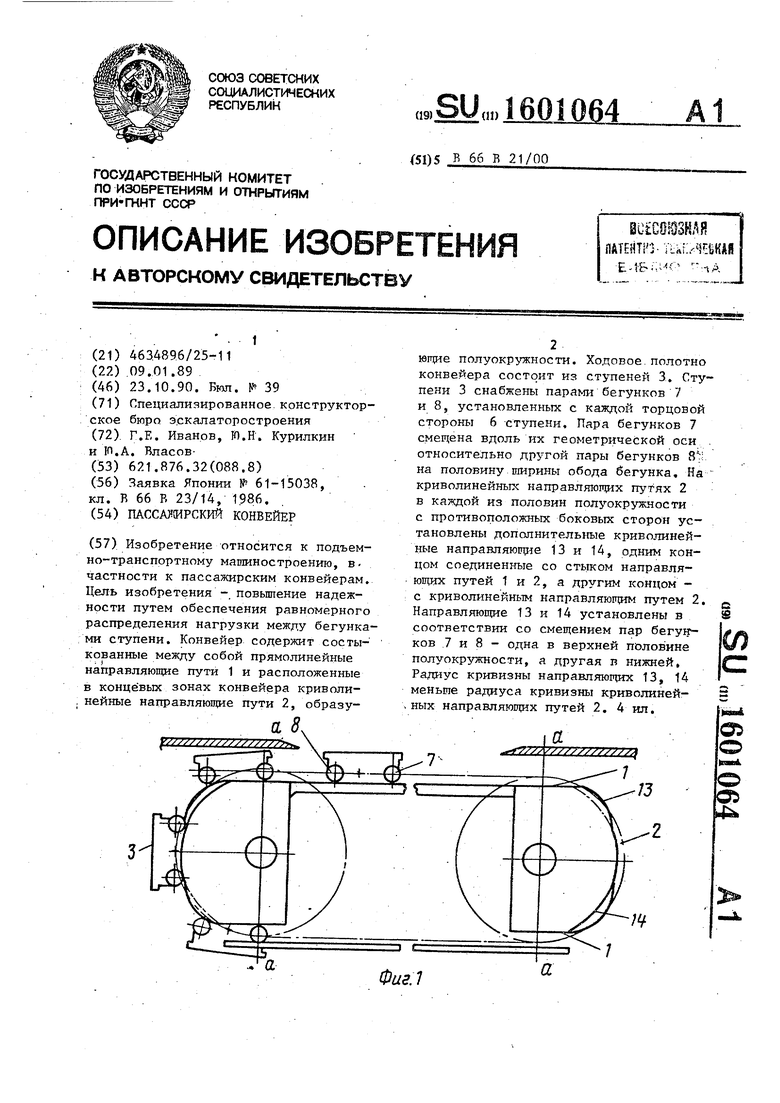
стыка напра8 }яюи4и)(
Фиг.2
1601064
Фиг.З
А-А
3/2
V
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
