Изобретение относится к автоматике и измерительной технике и может быть использовано в системах контроля и управления скоростью подвижных объектов.
Цель изобретения - повышение точности измерения скорости движения объекта..
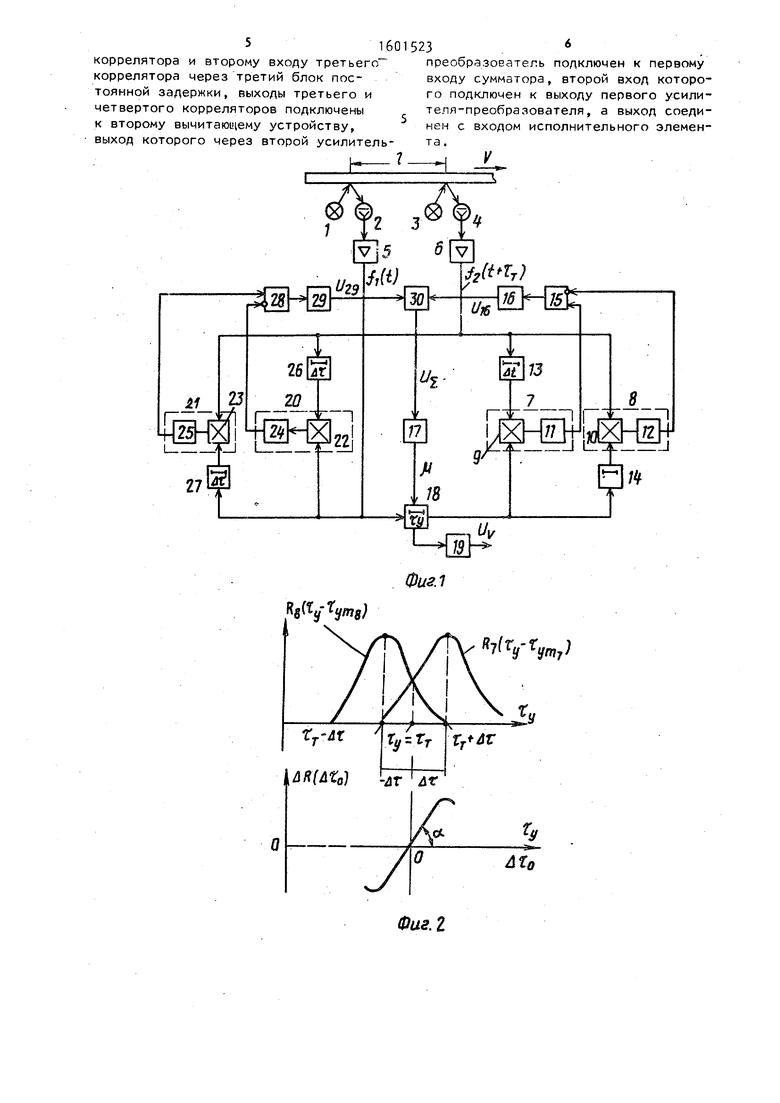
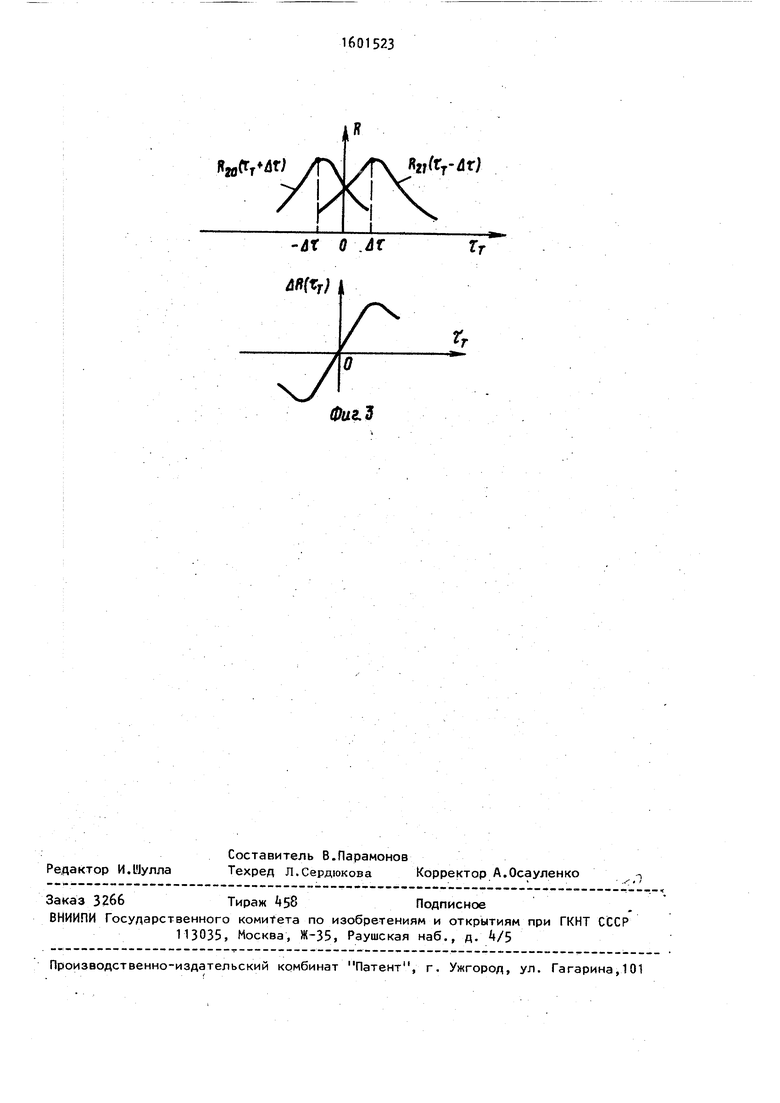
На фиг. 1 изображена функциональная схема корреляционного бесконтактного измерителя скорости подвижных объектов; на фиг. 2 - экстремальные корреляционные функции корреляторов замкнутой части измерителя скорости и статическая характеристика этих корреляторов совместное вычитающимустройст- вом;на фиг.З- экстремальные корреляционные функции корреляторов разомкнутой части измерителя скорости и статическая характеристика этих корреляторов совместно с вычитаюи4им устрой- ством.
Корреляционный измеритель скорости (фиг. 1) содержит первые источник 1 и приемник 2, вторые источник 3 и приемник 4, усилители 5 и 6, корреляторы 7 и 8, состоящие соответственно из умножителей 9 и 10 и сглаживающих фильтров 11 и 12, блоки 13 и 14 постоянной задержки, вычитающее устройство 15, усилитель-преобразователь 16, исполнительный элемент 17, ; блок 18- управляемой задержки, преобразователь 19 и вновь введенные корреляторы 20 и 21, состоящие из умножителей 22 и 23 и сглаживающих фильтров 24 и 25 соответственно, блоки 26 и 27 постоянной задержки, вычитающее .устройство 28, усилитель- преобразователь 29 и сумматор 30.
сл to
О)
Корреляционный измеритель скорости работает следунхиим образом.
Статические характеристики корреляторов 7 и 8 из-за блоков 13 и 1 постоянной задержки сдвинуты по оси ЬиСфиг. 2) на - АО и ( относительно точки Су l) где с--г - т|занспортное запаздывание,
-При изменении времени транспорт- нЬго запаздывания э значит, и скорости движения объекта экстремаль н|ые характеристики корреляторов 7 и 8| перемещаются по оси 6 и но сдвиг ними остается постоянным, рав- н|,1м 2ui. С помощью усилителя-преоб- р|азоватёля 1б и исполнительного элемента 17 из напряжения ошибки JR(&Cg) формируется управляющее воз- фйствие fU , причем т } |(поступает на блок 18 управляемой з адержки, изменяет tu таким образом ч{то ошибка , уменьшается, а уп- р:авляемая задержка t, стремится к Значению t r « С помощью преобразо- вателя 19 по формуле , J г|реобразуется в напряжение, пропорциональное скорости V, В частном случае, если корреляционный измеритель скорости (замкнутая часть системы) является статическим (т.е. усилитель-преобразователь 16 и исполнительный элемент 17 не содержат интегрирующего элемен- ia), то при постоянной скорости V возникает статическая ошибка, В аста Тической системе первого порядка ошибка измерения при V - const устраняется, но она возникает при изменении V во времени. При повышении порядка астатизма с первого до второго система становится неустойчивой.
Повышение точности измерения скорости в предлагаемой системе дости- гается за счет введения разомкнутой связи по времени транспортного запаздывания с т , зи измеряется
напряжение, являшчееся соответствующей функцией от , и подается на сумматор 30. Если замкнутая часть системы является статической, то изменением коэффициента усиления усилителя-преобразователя 29 можно свести к нулю ошибку . В случа если замкнутая часть системы является астатической с астатизмом первого порядка, для уменьшения динамиче
С помощью этой свя- преобразуется в
0 5 Q
0
5
5
кой ошибки, возникающей при изменении Г во времени, необходимо на сумматор 30 подавать напряжение, пропорциональное первой производной от , Такое напряжение можно получить, если в качестве усилителя-преобразователя 29 использовать дифференцирующий усилитель.
Формула изобретения
Корреляционный бесконтактный измеритель скорости подвижных объектов, содержащий два источника и два приемника излучения, расположенных на фиксированном расстоянии один от другого по направлению движения объекта, выход первого приемника соединен с входом первого усилителя, выход которого соединен с входом блока регулируемой задержки 5 первый выход которого соединен с преобразователем, а второй выход - с первым входом первого коррелятора и через первый блок постоянной задержки - с первым входом второго коррелятора, первый и второй корреляторы состоят из последовательно соединенных умножителя и сглаживающего фильтра, выход второго приемника соедннен с вторым входом первого коррелятора через последовательно включенные второй усилитель и второй блок постоянной задержки, выход второго усилителя соединен с вторым входом второго коррелятора, выходы первого и второго корреляторов подключены к вычитающему устройству, выход которого через первый усилитель-преобразователь и исполнительный элемент - к управляющему входу блока переменной задержки, отличающийся тем, что, с целью повышения точности измерения скорости движения объекта, введены сумматор, второй усилитель-преобразователь, второе вычитающее устройство, третий и четвертый блоки постоянной задержки, третий и четвертый корреляторы, состоящие из последовательно соединенных умножителя и сглаживающего фильтра, причем первый вход третьего коррелятора подключен к выходу первого усилителя, первый вход четвертого коррелятора подключен в выходу первого усилителя через четвертый блок постоянной задержки, выход второго усилителя подключен к второму входу четвертого
г 3

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| УСТРОЙСТВО ДЛЯ АДАПТИВНОЙ СЕЙСМИЧЕСКОЙ ПЕЛЕНГАЦИИ ОБЪЕКТОВ | 2009 |
|
RU2410751C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАСХОДА ДВУХКОМПОНЕНТНЫХ ВЕЩЕСТВ В ТРУБОПРОВОДЕ | 2001 |
|
RU2194950C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ТЕЧИ В НАПОРНОМ ТРУБОПРОВОДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2213332C2 |
| Приемник фазоманипулированных сигналов | 1984 |
|
SU1197136A1 |
| СЕЙСМИЧЕСКИЙ ЛОКАТОР НАЗЕМНЫХ ОБЪЕКТОВ | 2013 |
|
RU2536087C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2431847C1 |
| СПОСОБ МНОГОПАРАМЕТРИЧЕСКОГО СЛЕЖЕНИЯ ЗА НАВИГАЦИОННЫМИ СИГНАЛАМИ И ПРИЕМНИК СПУТНИКОВОЙ НАВИГАЦИИ С МНОГОПАРАМЕТРИЧЕСКИМ УСТРОЙСТВОМ СЛЕЖЕНИЯ ЗА СЛАБЫМИ СИГНАЛАМИ В УСЛОВИЯХ СВЕРХВЫСОКОЙ ДИНАМИКИ ОБЪЕКТА | 2012 |
|
RU2551805C2 |
| Корреляционный измеритель скорости рабочей среды | 1983 |
|
SU1158936A1 |
| ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1993 |
|
RU2067771C1 |
Изобретение относится к автоматике и измерительной технике и может быть использовано в системах контроля и управления скоростью подвижных объектов. Цель - повышение точности измерения скорости подвижных объектов. Измеритель состоит из замкнутой системы регулирования по задающему параметру - времени транспортного запаздывания Τт и разомкнутой связи по параметру Τт. Разомкнутая связь устраняет или существенно уменьшает ошибки измерения скорости, зависящие от величины транспортного запаздывания Τт и законов его изменения, кроме того она не влияет на устойчивость замкнутой системы регулирования. 3 ил.
Гг,
4f
27
Rg(ty-Tyfl,j;
1/V
7fVV7
2lfo
Фав.1
ЯадСГтМг;
-ЛТ о .AT
)
хУ
Фиг.3
я„/Гт-4г|
Гт
| Козубовский С.Ф | |||
| Корреляционные экстремальные системы | |||
| - К.: Науко- ва думка, 1973, с | |||
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
| рис | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
