Изобретение относится к области наземной навигации и может быть использовано в системах навигации, в которых для определения скорости движения наземного транспортного средства (ТС) с высокой точностью применяются параллельно несколько измерителей скорости.
Комплексные навигационные системы (НС) вследствие имеющейся в них избыточной информации, наличия соответствующих корректирующих средств и соответствующей обработки информации обладают точностью выше, чем любой из первичных источников [3].
В качестве дополнительных измерителей могут использоваться измерители, основанные на различных принципах определения скорости.
Известна НС, в которой в качестве дополнительного используется корреляционно-экстремальный измеритель скорости [1].
В указанном измерителе имеется два чувствительных элемента (ЧЭ), разнесенных в пространстве на строго определенное расстояние l в продольном направлении движения объекта, называемое в дальнейшем «база». Для определения скорости движения объекта определяется задержка во времени появления одного сигнала по отношению к другому. Сигналы отражаются от неоднородностей дорожного покрытия при освещении его мини-прожекторами движущегося объекта. Затем вычисляется экстремум взаимной корреляционной функции сигналов ƒ1(t) и ƒ2(t).
Сигналы ЧЭ после предварительного усиления подаются на коррелятор, состоящий из блока регулируемой задержки (БРЗ), множительного устройства и сглаживающего фильтра [5].
Выходной сигнал коррелятора R(τ) представляет собой взаимную корреляционную функцию сигналов ƒ1(t) и ƒ2(t):

где Т - время усреднения (интегрирования).
Сигнал коррелятора R(τ) максимален при τ=τТ, т.е. при равенстве введенной через БРЗ задержки τ и транспортного запаздывания τТ. Для этого величину τ изменяют таким образом, чтобы достичь максимального значения выходного сигнала коррелятора, обеспечивая условие τ=τТ.
Учитывая, что при фиксированном значении базы l транспортное запаздывание τT однозначно связано со скоростью движения объекта υ, можно по значениям БРЗ определить величину регулируемой задержки и скорость движения, так как
υ=l/τT.
Измеритель, построенный на основе указанного принципа, имеет следующие недостатки: 1) невозможность реализации малого базового расстояния l между приемными ЧЭ; 2) высокие требования к идентичности параметров ЧЭ; 3) проблема идентификации сигналов; 4) продолжительное время вычисления взаимной корреляционной функции.
Наиболее близкой по технической сущности является НС для определения скорости, в которой используется основной и дополнительный измерители скорости. В качестве основного используется механический датчик скорости (МДС), который является достаточно надежным и простым измерителем при относительно невысокой точности измерений [4, 6]. В качестве дополнительного применяется доплеровский датчик скорости (ДДС), который имеет более высокую точность измерения по сравнению с МДС [2], но может быть использован только при скоростях более 5 км/ч.
В указанной НС выполняются следующие действия.
1. МДС осуществляет непрерывное измерение скорости движения объекта с невысокой точностью.
2. ДДС периодически выполняет точные измерения скорости движения объекта.
3. Считывание точных измерений скорости с ДДС выполняется дискретно во времени.
4. На основании точных измерений ДДС вырабатываются в ЭВМ поправочные коэффициенты.
5. Поправочные коэффициенты поступают в память ЭВМ для последующего их использования при определении скорости движения объекта.
Принцип действия ДДС основан на эффекте Доплера [4], который заключается в измерении сдвига частот пропорциональных скорости движения объекта после отражения сигналов от поверхности Земли.
Измеренный доплеровский сдвиг частот определяется:
где λ - длина излучаемой волны; VOTH - скорость относительно поверхности Земли; α - угол излучения антенн относительно горизонта.
Измеритель, построенный на основе указанного принципа, имеет следующие недостатки: 1) ограниченный диапазон измерения (не работает при VOTH<5-10 км/ч); 2) наличие СВЧ-излучений; 3) увеличение погрешностей измерения, связанное с изменениями в окружающей среде (снег, пыль, дождь).
Целью настоящего изобретения является устранение недостатков рассмотренных НС и повышение точности измерения скорости объекта.
В предлагаемом способе определения скорости движения объекта в качестве основного измерителя также используется МДС, а в качестве дополнительного измерителя - оптоэлектронный датчик скорости (ОЭДС), основанный на измерении времени задержки τЗ сигналов при приеме их светочувствительными элементами.
В указанной НС выполняются следующие действия.
1. МДС осуществляет непрерывное измерение скорости движения объекта с невысокой точностью.
2. ОЭДС периодически выполняет точные измерения скорости движения объекта.
3. Считывание точных измерений скорости с ОЭДС выполняется дискретно во времени.
4. На основании точных измерений ОЭДС вырабатываются в ЭВМ поправочные коэффициенты.
5. Поправочные коэффициенты поступают в память ЭВМ для последующего их использования при определении скорости движения объекта.
В отличие от ближайшего аналога в указанном дополнительном измерителе для определения скорости движения объекта определяется задержка во времени появления одного сигнала по отношению к другому. Сигналы отражаются от неоднородностей дорожного покрытия при освещении его мини-прожекторами движущегося объекта. Тогда скорость движения V ТС может быть определена в соответствии с формулой:
V=l/τЗ.
Сигналы на выходах ЧЭ представляют собой случайную последовательность импульсов различной длительности и амплитуды, так как неоднородности дорожного покрытия, отражающие световой поток от излучателей оптоэлектронного датчика скорости (ОЭДС), разбросаны хаотично.
Кроме того, основное отличие принципа действия ОЭДС от корреляционно-экстремальных измерителей заключается в том, что оцениваются не вся совокупность импульсов, поступающих с ЧЭ, а лишь отдельные характерные импульсы, выделяемые в прогнозируемые интервалы времени.
Указанные интервалы времени определяются следующим образом. По информации, поступающей в систему навигации в результате измерения скорости VМДС механическим датчиком скорости в предыдущие моменты времени, прогнозируется скорость движения ТС в последующие моменты времени с учетом того, что приращение скорости невелико. На основании этих данных определяются временные интервалы, в которые должны попадать импульсы 2-го канала ОЭДС, отраженные от одной и той же неоднородности дорожного покрытия. Время ожидания этих импульсов τож определяется по следующей формуле:
τож=l/VМДС.
Так как точное значение появления ожидаемого импульса 2-го канала неизвестно, необходимо определить границы временного интервала, в который должен попасть этот импульс. Величина временного интервала 2Δτmp, определяемая его границами, как показано на фиг.1, обратно пропорциональна скорости движения объекта и составляет 30% от времени прохождения расстояния, равного базовому расстоянию l.
Возможны ситуации, когда во временной интервал попадает, например, пара импульсов τ2a и τ2в в момент времени ti+l (фиг.1). В этом случае искомый импульс определяют по алгоритму, в котором величины Δа и Δв находятся по формулам: 
Минимальная из них и будет соответствовать искомому импульсу τ2а.
Возможны также ситуации, когда импульсы во временной интервал не попадут вовсе. В этом случае данное измерение бракуется и исключается из серии измерений.
Таким образом, в предлагаемом способе помимо перечисленных в ближайшем аналоге используются следующие дополнительные действия.
1. На основе информации с МДС формируются временные интервалы, в которые должны попадать импульсы 2-го канала ОЭДС.
2. Определяется задержка во времени появления сигнала 1-го канала по отношению ко второму, по которой вычисляется скорость движения объекта.
Сравнительный анализ существенных признаков существующих способов определения скорости движения объекта в НС и настоящего способа показывает, что предложенный способ определения скорости движения объекта, основанный на измерении задержки входных сигналов в задаваемых границах временных интервалов, отличается тем, что за счет использования прогнозируемых временных интервалов и обработки полученной информации обеспечивается более точное определение скорости движения объекта.
Таким образом, предложенный способ имеет новизну. Авторам не известна совокупность существенных признаков, применяемых для решения данной технической задачи, что соответствует критерию «изобретательский уровень».
Источники информации
1. Белоглазов И.Н., Тарасенко В.П. Корреляционно-экстремальные системы. - М.: Советское радио, 1974, 392 с.
2. Браславский Д.А., Петров В.В. Точность измерительных устройств. - М.: Машиностроение, 1976, 312 с.
3. Помыкаев И.И., Селезнев В.П., Дмитроченко Л.А. Навигационные приборы и системы. - М.: Машиностроение, 1983, 456 с.
4. Попов А.П. Теория навигации, ч.1. - М.: МО СССР, 1982, 196 с.
5. Самотокин Б.Б., Мелешко В.В., Степанковский Ю.В. Навигационные приборы и системы. - К.: Вища школа, 1986, 343 с.
6. Солодов В.И. Системы наземной навигации. - М.: ВА РВСН им. Петра Великого, 1998, 128 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2552757C1 |
| Способ исключения аномальных результатов измерений скорости в автономной системе навигации наземного транспортного средства | 2019 |
|
RU2723892C1 |
| Устройство для автономного определения расстояния, пройденного наземным транспортным средством | 2021 |
|
RU2768547C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО НАЗЕМНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2549607C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО НАЗЕМНЫМ ТРАНСПОРТОМ | 2015 |
|
RU2584794C1 |
| Способ определения скорости движения наземного транспортного средства | 2018 |
|
RU2680654C1 |
| Способ автономного определения скорости движения наземного транспортного средства | 2016 |
|
RU2624335C1 |
| Устройство измерения скорости наземного транспортного средства | 2019 |
|
RU2711539C1 |
| Способ определения скорости движения наземного транспорта | 2022 |
|
RU2805016C1 |
| Способ измерения скорости движения наземного транспортного средства | 2022 |
|
RU2787685C1 |
Изобретение относится к области приборостроения и может найти применение в системах определения скорости движения наземного транспортного средства. Технический результат - повышение точности. Для достижения данного результата измеряют время задержки при приеме светочувствительными элементами сигналов, отраженных от неоднородностей дорожного покрытия при освещении их мини-прожекторами движущегося объекта. При этом оценивают не всю совокупность импульсов, поступающих с чувствительных элементов, а лишь отдельные характерные импульсы, выделяемые в прогнозируемые интервалы времени, с помощью механического датчика скорости. 1 ил.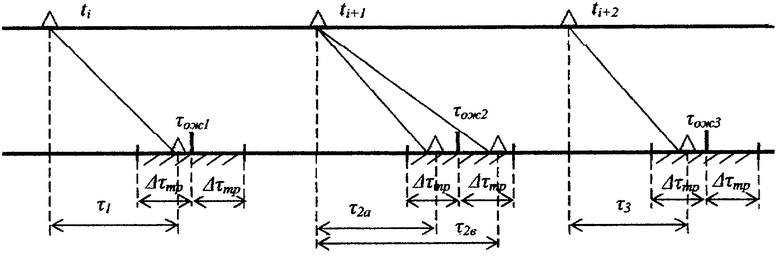
Способ определения скорости движения наземного транспортного средства, заключающийся в том, что при использовании двух измерителей скорости основного и дополнительного осуществляют непрерывное измерение скорости движения объекта основным и периодические измерения с высокой точностью дополнительным измерителем, отличающийся тем, что используют измерение времени задержки сигнала второго канала относительно первого высокоточным измерителем в определенных границах временных интервалов, предварительно определяемых менее точным измерителем скорости.
| ПОПОВ А.П | |||
| Теория навигации, ч.1 | |||
| - М.: МО СССР, 1982, 196 с | |||
| СОЛОДОВ В.И | |||
| Системы наземной навигации | |||
| - М.: ВА РВСН им.ПЕТРА ВЕЛИКОГО, 1998, 128 с | |||
| Способ измерения действительной скорости движения наземных транспортных средств и устройство для его осуществления | 1989 |
|
SU1835528A1 |
| СПОСОБ УВЕЛИЧЕНИЯ ВРЕМЕННОГО СДВИГА ДЛЯ ВЫЧИСЛЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ | 0 |
|
SU377810A1 |
| SU 1827052 A3, 07.07.1993. | |||

