Группа изобретений относится к области радионавигации, а конкретно - к приемникам сигналов спутниковых радионавигационных систем (СНРС) ГЛОНАСС (Россия) [1] и GPS (США) [2], осуществляющим одновременный прием сигналов этих систем в частотном диапазоне Lie кодовой модуляцией С\А кодом - кодом “стандартной точности”.
Известен приемник [3], содержащий последовательно соединенные радиочастотный преобразователь, многоканальный коррелятор и микропроцессор. На Рис.1 представлена упрощенная функциональная схема навигационного приемника-аналога 101, на которой отражены только основные существенные функциональные блоки. Сигнал, принятый антенной 102, подается на радиочастотный преобразователь 104, который его усиливает, фильтрует, выполняет преобразование на более низкие частоты и преобразует в цифровую форму. Радиочастотный преобразователь 104 имеет два цифровых выхода: по одному из которых выдается сигнал GPS, а по другому - сигнал ГЛОНАСС. Оба этих сигнала подаются на вход многоканального коррелятора 106 (на Рис.1 показан только один канал). Каждый из каналов может подключаться ко входу GPS или ко входу ГЛОНАСС. Кроме того, в приемнике имеется задающий генератор 103, выполненный в виде обычного кварцевого генератора или температурно-компенсированного кварцевого генератора (ТСХО) и вырабатывающий опорную частоту для синтезатора частот гетеродинов радиочастотного блока 104, а также тактовые частоты для блока цифровой обработки 106 и микропроцессора 119. Каждый канал корреляционной обработки содержит комплексный умножитель 108, коррелятор 110, генератор несущей частоты 111, генератор кода 114 и интегратор 115. Умножитель 108 умножает комплексный входной сигнал на комплексно сопряженный сигнал опорной частоты, поступающий от генератора несущей частоты 111. Коррелятор 110 умножает сигнал на копию псевдослучайного кода, соответствующего выбранному спутнику GPS или ГЛОНАСС. Копия псевдослучайного кода вырабатывается генератором кода 114. Выход коррелятора 110 интегрируется в интеграторе 115. Прямой (Prompt) выход интегратора 115 (I, Q)P подается на вход системы слежения за фазой несущей (ССФ) 116. Разностный (EML) выход интегратора 115 (I, Q)EML подается на вход системы слежения за задержкой (ССЗ) 117. Полная фаза phi на выходе ССФ используется в ССЗ для повышения точности и надежности слежения за задержкой. Оценки частоты сигнала спутника F и его задержки τ используются в навигационном процессоре 118 для решения навигационной задачи, а также для управления генераторами несущей и кода в канале корреляционной обработки.
Совокупность фазового дискриминатора 120, цифрового управляемого генератора (Numeric Controlled Oscillator, NCO) 121 и фильтра 122 работает как петля слежения за фазой несущей, выполненная в виде фазовой автоподстройки (ФАП), которая компенсирует частотные сдвиги между различными частотными каналами ГЛОНАСС, Допплеровские сдвиги частоты спутниковых сигналов и сдвиг частоты задающего генератора 103. Как правило, в качестве фильтра 122 в ССФ приемника-аналога используется БИХ-фильтр третьего порядка.
Существенным недостатком приемника-аналога 101 является неустойчивая работа его петли ФАП в условиях повышенной динамики объекта, на котором он установлен. Динамическая ошибка слежения за фазой в ФАП третьего порядка пропорциональна скорости изменения ускорения, т.е. рывку объекта. Если динамическая ошибка приближается к четверти или половине цикла (в зависимости от наличия или отсутствия модуляции сигнала битами данных навигационного сообщения), то происходит срыв слежения за фазой, а затем и за задержкой, поскольку для ССЗ необходимы точные фазовые данные phi, как это показано на Рис.1.
В работе [4] указывается, что динамическая ошибка в петле ФАП третьего порядка по величине на порядок превышает динамическую ошибку в петле частотной автоподстройки (ЧАП) второго порядка при одинаковых рывке и отношении сигнал/шум. В связи с этим, появились приемники, в которых в петле ССФ используется ЧАП вместо ФАП, либо ЧАП используется для поддержки слежения ФАП.
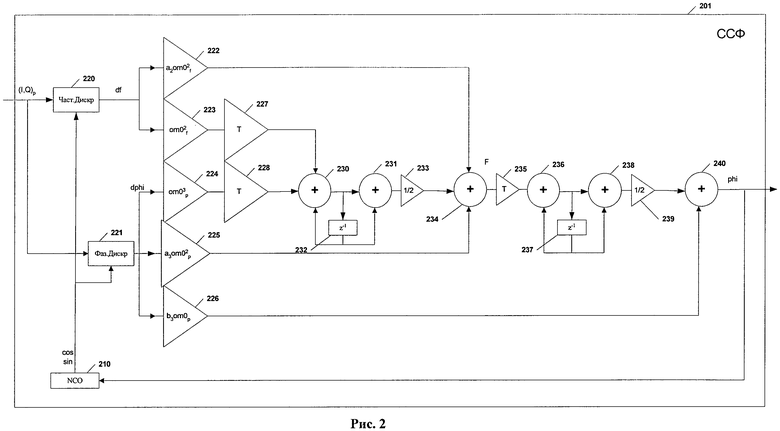
Наиболее близким из них является приемник (прототип) [5] “P.W.Ward. Performance Comparisons Between FLL, PLL, and a Novel FLL-Assisted-PLL Carrier Tracking Loop Under RF Interference Conditions. Proceedings of ION GPS-98”, в котором система слежения за фазой 201 (Рис.2) содержит ФАП третьего порядка, поддерживаемую системой ЧАП второго порядка. В ССФ 201 имеются частотный дискриминатор 220 и фазовый дискриминатор 221. В качестве опорного сигнала в обоих дискриминаторах используется комплексный сигнал с выхода цифрового управляемого генератора (NCO) 210. Цифровой сигнал df c выхода частотного дискриминатора умножается на постоянные коэффициенты в блоках 222, 223 и 227, а сигнал dphi с выхода фазового дискриминатора умножается на постоянные коэффициенты в блоках 224, 225, 226 и 228, где Т - шаг дискретизации по времени, om0f, om0p - собственные частоты ЧАП и ФАП соответственно, а2, а3, b3 - коэффициенты, определяющие форму частотной характеристики фильтров. Сумматоры 230, 231, умножитель 233 и элемент задержки 232 образуют интегратор ускорения, выход которого после суммирования в блоке 234 с взвешенными выходными сигналами дискриминаторов представляет собой оценку частоты сигнала F. Эта оценка частоты интегрируется в интеграторе скорости 235-239, выход которого после суммирования в блоке 240 с взвешенным выходным сигналом фазового дискриминатора представляет собой оценку фазы сигнала phi. Эта оценка используется для управления генератором 210 таким образом, что при постоянном ускорении и отсутствии случайных шумов опорный сигнал на выходе NCO 210 в точности совпадает с принятым сигналом (I, Q)P.
Величина динамической ошибки в ССФ 201 пропорциональна величине рывка и зависит от собственных частот ЧАП и ФАП. При увеличении, например, собственной частоты ЧАП в целях предотвращения срыва слежения динамическая ошибка уменьшается, но шумовая ошибка при этом увеличивается, что также может приводить к срыву слежения. В описании прототипа [5] приводится следующее условие надежного слежения в ЧАП:

где:
σn - среднеквадратическая шумовая ошибка;
δ - динамическая (систематическая) ошибка,
или конкретнее:

где:
Т=10 мс - время предварительного накопления;
В=0.53 ω0 - шумовая полоса фильтра ЧАП;
ω0 - собственная частота фильтра ЧАП;
cno=10SNR/10 - отношение сигнал/шум в герцах;
SNR - отношение сигнал/шум в дБГц;
J - рывок в м/с3;
λ - длина волны в м.
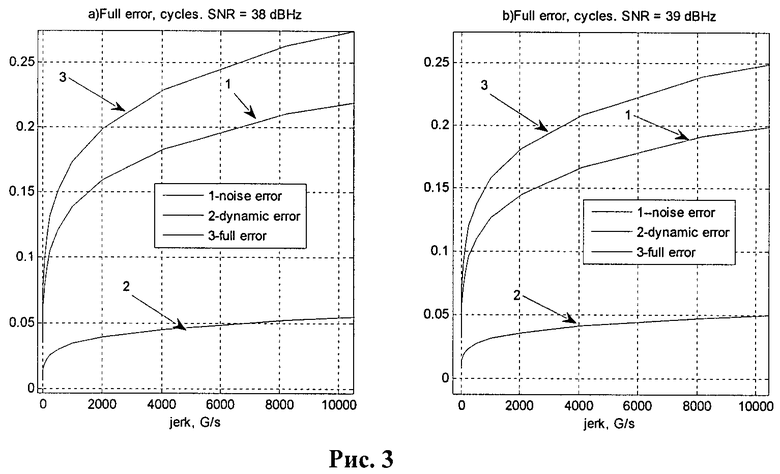
Первоначально прототип был рассчитан на величину рывка J=10 G/s. При этом минимальное (пороговое) значение сигнал/шум, при котором возможно надежное слежение, составляло 23.9 дБГц, исходя из (2). Однако, для многих применений, таких, как например, краш-тесты автомобилей, требуется надежное слежение при существенно большем рывке, а именно до 8000 G/s. Для этого необходимо повысить собственную частоту ЧАП ω0. Оптимальное значение собственной частоты ω0 находится из условия минимума левой части (1) при каждом сочетании значений SNR и J. Значение минимально возможной полной ошибки получается подстановкой оптимальной частоты в (2). Результаты расчетов для λ=0.19 м при SNR=39 и 38 дБГц представлены на Рис.3 а) и b) соответственно. Как видно из этих рисунков, пороговое отношение сигнал/шум, которое соответствует ошибке фазы 0.25 цикла, составляет около 38.5 дБГц, что на 14.6 дБ хуже, чем при умеренном рывке 10 G/s. Для целого ряда приложений требуется надежное слежение за более слабыми сигналами, т.е. более высокая чувствительность навигационного приемника. Таким образом, недостатком приемника-прототипа является невозможность слежения за 38 дБГц и более слабыми сигналами при сверхвысокой динамике объекта.
Предлагаемым изобретением решается задача надежного слежения за более слабыми сигналами (30 дБГц) при рывке объекта до 8000 G/s. Для достижения этого технического результата предлагается новый способ слежения за фазой навигационного сигнала, основанный на оценках четырех параметров выходного сигнала коррелятора (амплитуда, фаза, частота и скорость изменения частоты), которые выполняются по методу максимального правдоподобия (МП) в скользящем временном окне. При этом фаза навигационного сигнала в скользящем окне аппроксимируется суммой полиномов, ортогональных на множестве точек временной дискретизации, а вес при полиноме первой степени однозначно связан с частотой сигнала, и вес при полиноме второй степени однозначно связан со скоростью изменения частоты сигнала.
Вышеупомянутые оценки метода максимального правдоподобия могут быть найдены итеративным методом, причем на каждом шаге итераций выполняются следующие операции:
- Формирование опорного комплексного сигнала с модулем, равным единице, и аргументом, равным вышеупомянутой взвешенной сумме полиномов;
- Формирование суммы произведений входного комплексного сигнала на комплексно-сопряженный опорный сигнал, причем суммирование распространяется на текущее временное окно, а полученная сумма в дальнейшем будет обозначена как α;
- Формирование суммы произведений входного комплексного сигнала на комплексно-сопряженный опорный сигнал и на значения вышеупомянутого полинома первой степени, причем суммирование распространяется на текущее временное окно, а полученная сумма в дальнейшем будет обозначена как β1;
- Формирование суммы произведений входного комплексного сигнала на комплексно-сопряженный опорный сигнал и на квадрат значений вышеупомянутого полинома первой степени, причем суммирование распространяется на текущее временное окно, а полученная сумма в дальнейшем будет обозначена как γ1;
- Формирование суммы произведений входного комплексного сигнала на комплексно-сопряженный опорный сигнал и на значения вышеупомянутого полинома второй степени, причем суммирование распространяется на текущее временное окно, а полученная сумма в дальнейшем будет обозначена как β2;
- Формирование суммы произведений входного комплексного сигнала на комплексно-сопряженный опорный сигнал и на квадрат значений полинома второй степени, причем суммирование распространяется на текущее временное окно, а полученная сумма в дальнейшем будет обозначена как γ2;
- Формирование оценки амплитуды сигнала как А=|α| / N, где N - количество отсчетов сигнала коррелятора в скользящем окне;
- Формирование оценки фазы сигнала в виде аргумента комплексного числа α;
- Формирование величины коррекции оценки веса при полиноме первой степени в виде мнимой части произведения β1 на комплексно-сопряженное значение α, деленной на разность между квадратом модуля β1 и действительной частью произведения γ1 на комплексно-сопряженное значение α:
- Формирование величины коррекции оценки веса при полиноме второй степени в виде мнимой части произведения β2 на комплексно-сопряженное значение α, деленной на разность между квадратом модуля β2 и действительной частью произведения γ2 на комплексно-сопряженное значение α:
- Формирование скорректированных оценок весов как сумм текущих оценок и вышеупомянутых коррекций.
В качестве начального приближения для веса при полиноме первой степени для итераций в текущем окне может быть взято значение веса при полиноме первой степени в последней итерации предыдущего окна, увеличенное на удвоенный вес при полиноме второй степени в последней итерации предыдущего окна, а в качестве начального приближения для веса при полиноме второй степени для итераций в текущем окне берется значение веса при полиноме второй степени в последней итерации предыдущего окна.
Кроме вышеупомянутого нового способа в настоящем изобретении предлагается устройство для его реализации, которое содержит синхронизатор, вход которого является входом синхронизации многопараметрического устройства слежения, сдвиговый регистр комплексного сигнала, вход которого является сигнальным входом многопараметрического устройства слежения, первое, второе, третье и четвертое запоминающие устройства, входы адресации которых соединены с первым выходом синхронизатора, первый перемножитель, первый вход которого соединен с выходом первого запоминающего устройства, второй перемножитель, первый вход которого соединен с выходом второго запоминающего устройства, первый сумматор, один вход которого соединен с выходом первого перемножителя, а второй вход соединен с выходом второго перемножителя, третий перемножитель, один вход которого соединен с выходом первого сумматора, а второй вход соединен с выходом сдвигового регистра комплексного сигнала, первый накапливающий сумматор, вход которого соединен с выходом третьего перемножителя, первый блок формирования квадрата модуля комплексного сигнала, вход которого соединен с выходом первого накапливающего сумматора, а выход является выходом квадрата амплитуды многопараметрического устройства слежения, блок формирования аргумента комплексного сигнала, вход которого соединен с выходом первого накапливающего сумматора, а выход является выходом фазы многопараметрического устройства слежения, четвертый перемножитель, один вход которого соединен с выходом третьего перемножителя, а второй вход соединен с выходом первого запоминающего устройства, второй накапливающий сумматор, вход которого соединен с выходом четвертого перемножителя, пятый перемножитель, один вход которого соединен с выходом первого накапливающего сумматора, а второй вход соединен с выходом второго накапливающего сумматора, первый блок формирования мнимой части комплексного сигнала, вход которого соединен с выходом пятого перемножителя, шестой перемножитель, один вход которого соединен с выходом третьего перемножителя, а второй вход соединен с выходом второго запоминающего устройства, третий накапливающий сумматор, вход которого соединен с выходом шестого перемножителя, седьмой перемножитель, один вход которого соединен с выходом первого накапливающего сумматора, а второй вход соединен с выходом третьего накапливающего сумматора, первый блок формирования действительной части комплексного сигнала, вход которого соединен с выходом седьмого перемножителя, восьмой перемножитель, один вход которого соединен с выходом третьего перемножителя, а второй вход соединен с выходом третьего запоминающего устройства, четвертый накапливающий сумматор, вход которого соединен с выходом восьмого перемножителя, девятый перемножитель, один вход которого соединен с выходом первого накапливающего сумматора, а второй вход соединен с выходом четвертого накапливающего сумматора, второй блок формирования мнимой части комплексного сигнала, вход которого соединен с выходом девятого перемножителя, десятый перемножитель, один вход которого соединен с выходом третьего перемножителя, а второй вход соединен с выходом четвертого запоминающего устройства, пятый накапливающий сумматор, вход которого соединен с выходом десятого перемножителя, одиннадцатый перемножитель, один вход которого соединен с выходом первого накапливающего сумматора, а второй вход соединен с выходом пятого накапливающего сумматора, второй блок формирования действительной части комплексного сигнала, вход которого соединен с выходом одиннадцатого перемножителя, второй блок формирования квадрата модуля комплексного сигнала, вход которого соединен с выходом второго накапливающего сумматора, первый блок вычитания, у которого вход уменьшаемого соединен с выходом второго блока формирования квадрата модуля комплексного сигнала, а вход вычитаемого соединен с выходом первого блока формирования действительной части комплексного сигнала, первый ограничитель, вход которого соединен с выходом первого блока вычитания, первый блок деления, у которого вход делимого соединен с выходом первого блока формирования мнимой части комплексного сигнала, а вход делителя соединен с выходом первого ограничителя, шестой накапливающий сумматор, вход которого соединен с выходом первого блока деления, третий блок формирования квадрата модуля комплексного сигнала, вход которого соединен с выходом четвертого накапливающего сумматора, второй блок вычитания, у которого вход уменьшаемого соединен с выходом третьего блока формирования квадрата модуля комплексного сигнала, а вход вычитаемого соединен с выходом второго блока формирования действительной части комплексного сигнала, второй ограничитель, вход которого соединен с выходом второго блока вычитания, второй блок деления, у которого вход делимого соединен с выходом второго блока формирования мнимой части комплексного сигнала, а вход делителя соединен с выходом второго ограничителя, седьмой накапливающий сумматор, вход которого соединен с выходом второго блока деления, а выход соединен со вторым входом второго перемножителя, умножитель на два, вход которого соединен с выходом седьмого накапливающего сумматора, второй сумматор, один вход которого соединен с выходом шестого накапливающего сумматора, а второй вход соединен с выходом умножителя на два, и мультиплексор, первый сигнальный вход которого соединен с выходом второго сумматора, второй сигнальный вход соединен с выходом шестого накапливающего сумматора, вход управления соединен с входом синхронизации многопараметрического устройства слежения, а выход соединен со вторым входом первого перемножителя и является выходом частоты многопараметрического устройства.
Кроме того, в настоящем изобретении предлагается приемник спутниковой навигации, в котором вышеупомянутое многопараметрическое устройство используется для слежения за слабыми сигналами в условиях сверхвысокой динамики объекта, и который содержит задающий генератор, последовательно соединенные радиочастотный преобразователь, вход которого образует сигнальный вход приемника, многоканальный цифровой коррелятор, многоканальное устройство цифровой обработки корреляционных отсчетов и навигационный процессор, первый вход которого соединен с выходом системы слежения за задержкой многоканального устройства цифровой обработки корреляционных отсчетов, причем каждый канал цифрового коррелятора содержит входной мультиплексор GPS/ГЛОНАСС, генератор несущей, смеситель несущей, генератор кода, смеситель кода и интегратор, а каждый канал многоканального устройства цифровой обработки корреляционных отсчетов содержит генератор временной шкалы канала, вход которого соединен с выходом задающего генератора, и систему слежения за задержкой, отличающийся тем, что в каждый канал многоканального устройства цифровой обработки корреляционных отсчетов дополнительно вводится первое многопараметрическое устройство слежения, сигнальный вход которого соединен с прямым (Prompt) выходом соответствующего корреляционного канала, а вход синхронизации соединен с первым выходом генератора временной шкалы канала, генератор меандра, вход которого соединен со вторым выходом генератора временной шкалы канала, перемножитель, один вход которого соединен с прямым (Prompt) выходом соответствующего корреляционного канала, а второй вход соединен с выходом генератора меандра, второе многопараметрическое устройство слежения, сигнальный вход которого соединен с выходом перемножителя, а вход синхронизации соединен с первым выходом генератора временной шкалы канала, блок выбора максимума, один вход которого соединен с выходом оценки квадрата амплитуды первого многопараметрического устройства слежения, второй вход соединен с выходом оценки квадрата амплитуды второго многопараметрического устройства слежения, а выход соединен со вторым входом навигационного процессора, первый мультиплексор, первый вход которого соединен с выходом оценки частоты первого многопараметрического устройства слежения, второй вход соединен с выходом оценки частоты второго многопараметрического устройства слежения, вход управления соединен с выходом блока выбора максимума, а выход соединен с входом управления генератора несущей соответствующего корреляционного канала и с третьим входом навигационного процессора, и второй мультиплексор, первый вход которого соединен с выходом оценки фазы первого многопараметрического устройства слежения, второй вход соединен с выходом оценки фазы второго многопараметрического устройства слежения, вход управления соединен с выходом блока выбора максимума, а выход соединен с входом управления системы слежения за задержкой и с четвертым входом навигационного процессора.
В предлагаемом способе комплексный навигационный сигнал на множестве точек временной дискретизации kT, k=0,1,…N-1 представляется следующим образом:

где:
zk, k=0,1,…N-1 - аддитивная смесь сигнала и шума на выходе коррелятора;
N - количество отсчетов во временном окне:
А - неизвестная амплитуда сигнала;
θ0, θ1, θ2 - неизвестные параметры сигнала, причем θ0 - фаза, θ1 взаимно-однозначно связан с частотой, а θ2 взаимно-однозначно связан со скоростью изменения частоты сигнала;
ζk=ξk+j·ηk - комплексный гауссов шум с независимыми в совокупности отсчетами;

Полиномы разложения (4) обладают свойством ортогональности:

Известно [6], что оценки максимального правдоподобия (МП) обладают рядом оптимальных свойств, в частности, минимальной дисперсией при некоторых условиях, которые можно считать выполненными в навигационном приемнике. В нашем случае МП-оценки параметров А, θ0, θ1, θ2 находятся из условия:

При фиксированных θ1, θ2 МП-оценки амплитуды А и постоянной составляющей фазы θ0 находятся из (6) как:

где

а условие (6) превращается в:

Максимизация (9) по θ1, θ2 может быть выполнена итеративным методом наискорейшего спуска [7], который, с учетом свойства ортогональности (5), порождает следующие оценки на (m+1)-й итерации:
где:




где:
zk - входной комплексный сигнал;
e-j(ϑ1P1(k)+ϑ2P2(k)) - комплексно-сопряженный опорный сигнал, модуль которого равен 1, а фаза равна взвешенной сумме полиномов, определенной в (3).
В результате итерационного процесса (10) получаются МП-оценки параметров  ,
,  ,
,  в текущем n-м скользящем окне. По сути
в текущем n-м скользящем окне. По сути  представляет собой оценку фазы в середине n-го скользящего окна, а
представляет собой оценку фазы в середине n-го скользящего окна, а  ,
,  пропорциональны оценке первой производной фазы в середине n-го скользящего окна и второй производной фазы соответственно.
пропорциональны оценке первой производной фазы в середине n-го скользящего окна и второй производной фазы соответственно.
При появлении следующего входного отсчета zk процесс (10) повторяется в новом скользящем окне k=1,2,…N:

или

причем оценки, полученные в предыдущем n-м окне, используются как начальная точка итераций в (n+1)-м окне. Уравнение (12) приобретает точно такую же форму, как (9), если в (12) заменить k на (k-1) и преобразовать МП-оценки параметров n-го окна следующим образом:



Условие устойчивого слежения (1) здесь состоит в том, чтобы приращение полной ошибки фазы опорного сигнала в (n+1)-м окне не превышало 0.5 цикла.
Среднеквадратическая случайная (шумовая) компонента приращения этой ошибки приближенно рассчитывается как:

где А/σξ - отношение амплитуды входного сигнала к шуму в квадратурном корреляционном канале.
Динамическая компонента приращения ошибки равна:
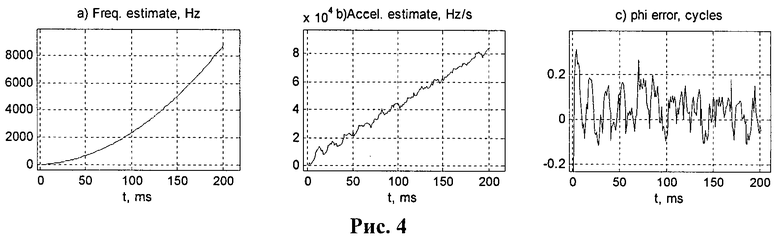
При рывке 8000 G/s, λ=0.19 м, Т=1 мс, N=20 и SNR=29.1 дБГц получаем из (14) и (15): 3σN=0.468, δN=0.0319, т.е. условие надежного слежения 3σN+δN<0.5 удовлетворяется. Таким образом, предлагаемый способ при одном и том же рывке объекта обеспечивает надежное слежение за сигналом с SNR=29.1 дБГц, который примерно на 9.5 дБ слабее, чем пороговый сигнал в прототипе. На Рис.4 приведен пример поведения оценок: а) частоты, b) производной частоты, а также с) ошибки оценки фазы. Эти данные получены в статистической модели предлагаемого способа для рывка 8000 G/s и SNR=30 дБГц на интервале 0.2 с. На этих рисунках видно, что аномальные ошибки оцениваемых параметров отсутствуют, т.е. слежение происходит надежно без срывов.
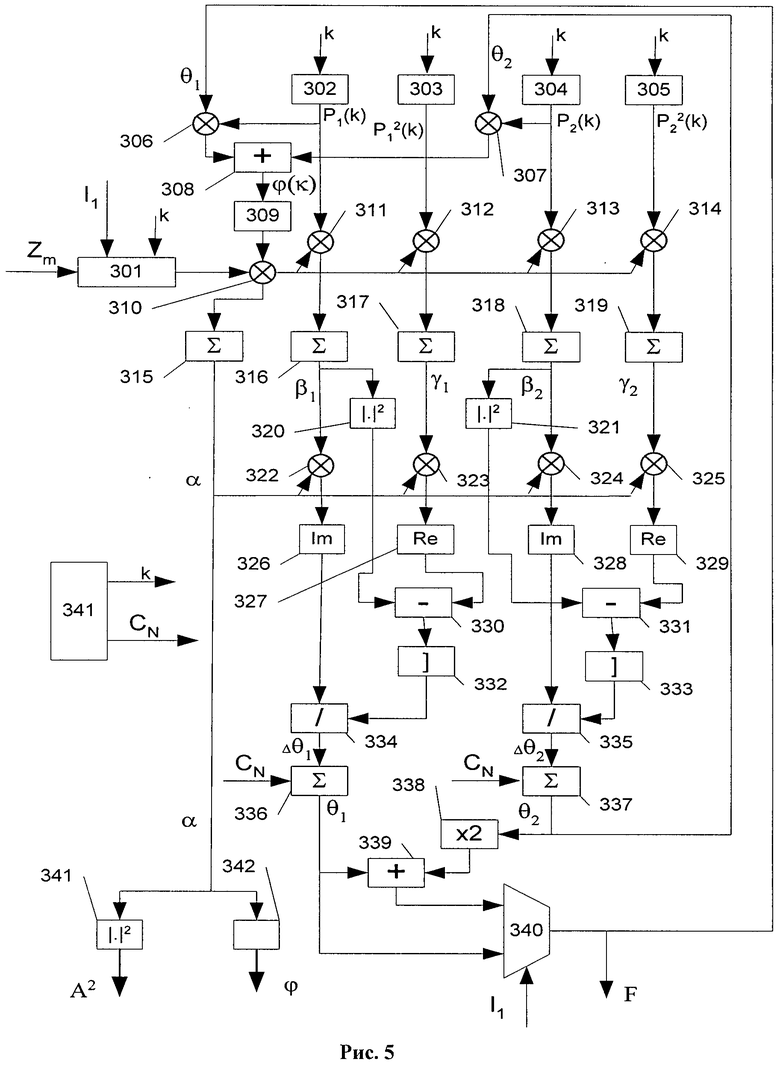
Устройство многопараметрического слежения, реализующее предложенный выше способ, показано на Рис.5. Это устройство вырабатывает оценки трех параметров: θ0, θ1, θ2, которые очевидным образом связаны с фазой, частотой и скоростью изменения частоты навигационного сигнала. Оно работает следующим образом. Входной комплексный сигнал Zm записывается в сдвиговый регистр 301 по входному тактовому сигналу I1. Регистр 301 содержит N последних отсчетов входного сигнала, т.е. временное окно длительностью NT, где Т - интервал времени между последовательными входными отсчетами. В блоках ПЗУ 302 и 304 содержатся значения ортогональных полиномов P1(k) и P2(k) соответственно, а в блоках ПЗУ 303 и 305 - квадраты этих значений  и
и  . Адресация всех ПЗУ, а также входного регистра 301, производится одним и тем же значением k=0,1,…N-1, которое вырабатывается блоком синхронизации 341. На каждом k-м такте работы устройства значения P1(k) и P2(k), извлеченные из ПЗУ 302, 304, умножаются в умножителях 306, 307 на текущие значения оцениваемых параметров θ1 и θ2 соответственно и суммируются в сумматоре 308, в результате чего получается текущее значение фазы опорного сигнала во временном окне φ(k)=θ1P1(k)+θ2P2(k). В блоке 309 формируется комплексный опорный сигнал е-jφ(k). По сути, блок 309 состоит из таблиц синуса и косинуса, адресуемых значением фазы φ(k). В комплексном перемножителе 310 входной сигнал Zk умножается на опорный сигнал, а полученное произведение Zke-jφ(k) умножается на соответствующие значения полиномов и их квадратов в умножителях 311-314. В накопителе 315 текущее произведение Zke-jφ(k) прибавляется к сумме всех таких произведений, полученных при предшествующих значениях k, формируя таким образом значение α в соответствии с (11). Аналогично в накопителях 316-319 формируются значения β1, γ1, β2, γ2 в соответствии с (11). По окончании процесса накопления, т.е. по достижении последнего значения k=N-1, в блоках 322-325 выполняется умножение полученных значений β1, γ1, β2, γ2 на комплексно сопряженное значение α, т.е. на α*. Далее в блоках 326 и 328 выделяются мнимые части соответствующих произведений, т.е. формируются значения числителей в уравнениях (10). Аналогично в блоках 327 и 329 выделяются действительные части соответствующих произведений, которые после вычитания из значений квадратов модулей β1 и β2, сформированных в блоках 320 и 321, образуют значения знаменателей в уравнениях (10). В блоках 334 и 335 выполняется деление соответствующего числителя на соответствующий знаменатель, причем значения знаменателей предварительно подвергаются ограничению снизу в ограничителях 332 и 333 с целью предотвращения деления на 0. В результате на выходах блоков 334 и 335 получаются поправки к текущим значениям оцениваемых параметров θ1 и θ2 в соответствии с (10). По окончании цикла накопления по k от 0 до N-1 синхронизатор 341 вырабатывает сигнал CN, по которому эти поправки в блоках 336, 337 добавляются к текущим значениям оцениваемых параметров, а накопленные значения в блоках 315-319 обнуляются. Таким образом, новые значения оцениваемых параметров θ1 и θ2 получаются на выходах накопителей 336 и 337 в полном соответствии с (10), (11). С этими новыми значениями выполняется новый шаг итераций при условии, что временное окно осталось неизменным, т.е. не появился новый входной тактовый сигнал I1. Очевидно, что если начальные значения параметров θ1 и θ2 не слишком сильно отличаются от оптимальных, то с каждой последующей итерацией оценки θ1 и θ2 в соответствии с методом наискорейшего спуска приближаются к оптимальным и перестают изменяться при β1=0 и β2=0, т.е. в точке максимума (9), т.к. числитель в (10) есть 1/2 производной от левой части (9), а знаменатель в (10) всегда положителен благодаря ограничителям 332, 333. В блоках 338, 339 формируется значение коэффициента θ1 для следующего временного окна в соответствии с 2-м уравнением системы уравнений экстраполяции (13), и по тактовому сигналу I1 с помощью мультиплексора 340 оно передается на второй вход перемножителя 306 в качестве начального значения для нового временного окна. Кроме того, по вышеупомянутому сигналу CN значение на выходе накопителя 337 подается на второй вход перемножителя 307 в соответствии с 3-м уравнением системы уравнений экстраполяции (13). Выходной сигнал мультиплексора 340 представляет собой максимально правдоподобную оценку частоты в текущем окне с коэффициентом Т, равным временному интервалу между корреляционными отсчетами. Максимально правдоподобная оценка квадрата амплитуды формируется в блоке 341 как квадрат модуля комплексного сигнала, а фазы - в блоке 342 как ее аргумент этого комплексного сигнала.
. Адресация всех ПЗУ, а также входного регистра 301, производится одним и тем же значением k=0,1,…N-1, которое вырабатывается блоком синхронизации 341. На каждом k-м такте работы устройства значения P1(k) и P2(k), извлеченные из ПЗУ 302, 304, умножаются в умножителях 306, 307 на текущие значения оцениваемых параметров θ1 и θ2 соответственно и суммируются в сумматоре 308, в результате чего получается текущее значение фазы опорного сигнала во временном окне φ(k)=θ1P1(k)+θ2P2(k). В блоке 309 формируется комплексный опорный сигнал е-jφ(k). По сути, блок 309 состоит из таблиц синуса и косинуса, адресуемых значением фазы φ(k). В комплексном перемножителе 310 входной сигнал Zk умножается на опорный сигнал, а полученное произведение Zke-jφ(k) умножается на соответствующие значения полиномов и их квадратов в умножителях 311-314. В накопителе 315 текущее произведение Zke-jφ(k) прибавляется к сумме всех таких произведений, полученных при предшествующих значениях k, формируя таким образом значение α в соответствии с (11). Аналогично в накопителях 316-319 формируются значения β1, γ1, β2, γ2 в соответствии с (11). По окончании процесса накопления, т.е. по достижении последнего значения k=N-1, в блоках 322-325 выполняется умножение полученных значений β1, γ1, β2, γ2 на комплексно сопряженное значение α, т.е. на α*. Далее в блоках 326 и 328 выделяются мнимые части соответствующих произведений, т.е. формируются значения числителей в уравнениях (10). Аналогично в блоках 327 и 329 выделяются действительные части соответствующих произведений, которые после вычитания из значений квадратов модулей β1 и β2, сформированных в блоках 320 и 321, образуют значения знаменателей в уравнениях (10). В блоках 334 и 335 выполняется деление соответствующего числителя на соответствующий знаменатель, причем значения знаменателей предварительно подвергаются ограничению снизу в ограничителях 332 и 333 с целью предотвращения деления на 0. В результате на выходах блоков 334 и 335 получаются поправки к текущим значениям оцениваемых параметров θ1 и θ2 в соответствии с (10). По окончании цикла накопления по k от 0 до N-1 синхронизатор 341 вырабатывает сигнал CN, по которому эти поправки в блоках 336, 337 добавляются к текущим значениям оцениваемых параметров, а накопленные значения в блоках 315-319 обнуляются. Таким образом, новые значения оцениваемых параметров θ1 и θ2 получаются на выходах накопителей 336 и 337 в полном соответствии с (10), (11). С этими новыми значениями выполняется новый шаг итераций при условии, что временное окно осталось неизменным, т.е. не появился новый входной тактовый сигнал I1. Очевидно, что если начальные значения параметров θ1 и θ2 не слишком сильно отличаются от оптимальных, то с каждой последующей итерацией оценки θ1 и θ2 в соответствии с методом наискорейшего спуска приближаются к оптимальным и перестают изменяться при β1=0 и β2=0, т.е. в точке максимума (9), т.к. числитель в (10) есть 1/2 производной от левой части (9), а знаменатель в (10) всегда положителен благодаря ограничителям 332, 333. В блоках 338, 339 формируется значение коэффициента θ1 для следующего временного окна в соответствии с 2-м уравнением системы уравнений экстраполяции (13), и по тактовому сигналу I1 с помощью мультиплексора 340 оно передается на второй вход перемножителя 306 в качестве начального значения для нового временного окна. Кроме того, по вышеупомянутому сигналу CN значение на выходе накопителя 337 подается на второй вход перемножителя 307 в соответствии с 3-м уравнением системы уравнений экстраполяции (13). Выходной сигнал мультиплексора 340 представляет собой максимально правдоподобную оценку частоты в текущем окне с коэффициентом Т, равным временному интервалу между корреляционными отсчетами. Максимально правдоподобная оценка квадрата амплитуды формируется в блоке 341 как квадрат модуля комплексного сигнала, а фазы - в блоке 342 как ее аргумент этого комплексного сигнала.
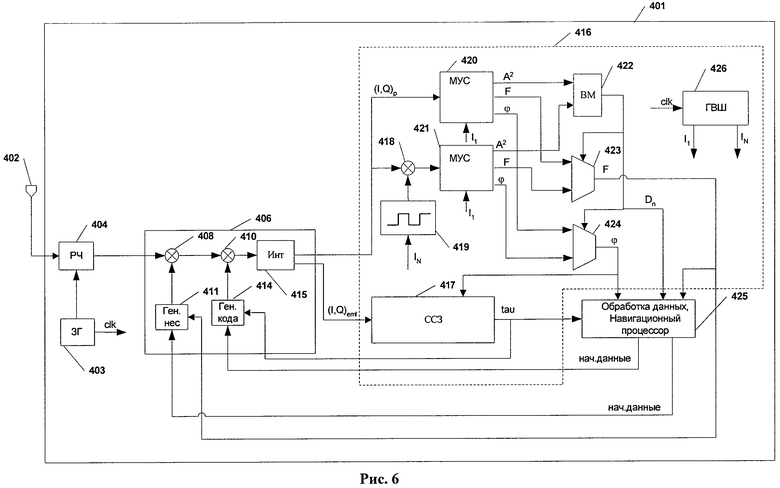
Предлагаемый приемник спутниковой навигации с многопараметрическим устройством слежения за слабыми сигналами в условиях высокой динамики объекта (Рис.6) содержит последовательно соединенные радиочастотный преобразователь 404, многоканальный коррелятор 406 (на Рис.6 показан только один канал коррелятора), блоки цифровой обработки корреляционных данных 416 (на Рис.6 показан только один такой блок) и навигационный процессор 425, причем работа всех составных частей синхронизируется от одного задающего генератора 403. Приемник работает следующим образом. Сигнал, принятый антенной 402, подается на радиочастотный блок 404, который его усиливает, фильтрует, выполняет преобразование на более низкие частоты и преобразует в цифровую форму, а оцифрованный сигнал подвергается корреляционной обработке в многоканальном корреляторе 406. Все вышеуказанные операции в приемнике 401 полностью аналогичны тем, которые выполняются в приемнике-аналоге и приемнике-прототипе. В результате на вход блока цифровой обработки корреляционных данных 416 поступает прямой (Prompt) отсчет комплексного корреляционного интеграла (I, Q)P и разностный (EML) отсчет комплексного корреляционного интеграла (I, Q)eml. Разностный отсчет обрабатывается обычным образом в системе слежения за задержкой 417, а прямой отсчет подается на вход многопараметрического устройства слежения 420, а также на вход еще одного многопараметрического устройства слежения 421 после умножения в блоке 418 на сигнал меандра, вырабатываемый блоком 419.
Блоки 418, 419, 421, 422-424 введены для того, чтобы учесть возможные скачки фазы сигнала на ±π из-за фазовой манипуляции битами навигационного сообщения. В режиме слежения положение границы бита навигационного сообщения известно и учитывается в генераторе временной шкалы канала 426, который вырабатывает тактовый сигнал IN в момент возможного скачка фазы сигнала, а также тактовый сигнал I1 для многопараметрических устройств слежения 420, 421. По сигналу IN в блоке 419 выполняется переключение знака его выходного сигнала на противоположный. Таким образом, в блоках 420 и 421 параллельно выполняется оценивание параметров сигнала при гипотезе, соответствующей отсутствию изменения значения бита навигационного сообщения в текущем временном окне (блок 420), и при альтернативе, что такое изменение имеется (блок 421). Оптимальное по критерию максимального правдоподобия решающее правило состоит в сравнении квадратов оценок амплитуд сигнала при гипотезе и альтернативе, т.е. на выходах А2 блоков 420 и 421, и такое сравнение выполняется в блоке выбора максимума 422. Если сигнал А2 на выходе блока 420 превышает сигнал А2 на выходе блока 421, то принимается решение в пользу гипотезы (Dn=0), а в противном случае - в пользу альтернативы (Dn=1). Сигнал Dn управляет мультиплексорами 423 и 424 таким образом, что в навигационный процессор 425, а также на вход управления генератором несущей 411 и на управление ССЗ 417 выдаются значения МП-оценок частоты и фазы, соответствующие максимально правдоподобному решению о значении бита навигационного сообщения.
Заявляемый приемник и многопараметрическое устройство слежения состоят из функциональных блоков, устройство которых широко известно в области спутниковой навигации. Например, различные методы реализации радиочастотного преобразователя 404 описаны в [3], [8] и [9], в заявляемом приемнике может быть использована любая из микросхем, описанных в [8]. Устройство ССЗ 417 также хорошо известно из [3]. В качестве навигационного процессора 425 может быть использован, например, ADSP-2188N компании Analog Devices, в качестве задающего генератора 403 - любая из выпускаемых различными компаниями микросхем ТСХО или кварцевых генераторов, в качестве генератора временной шкалы 426 - любые из выпускаемых электронной промышленностью микросхем двоичных счетчиков.
Предлагаемый приемник спутниковой навигации с многопараметрическим устройством слежения за слабыми сигналами в условиях сверхвысокой динамики объекта обеспечивает решение технической задачи уменьшения порогового сигнала на 9.5 дБ и соответствующего повышения чувствительности при рывке объекта до 8000 G/c. При этом обеспечивается надежное слежение без срывов при отношении сигнал/шум, не превышающем 30 дБГц.
На Рис.1 представлена функциональная схема приемника-аналога.
На Рис.2 представлена функциональная схема системы слежения за фазой в приемнике-прототипе.
На Рис.3 представлены графики ошибки оценки фазы в приемнике-прототипе в зависимости от величины рывка: а) при уровне сигнал/шум 38 дБГц, b) при уровне сигнал/шум 39 дБГц.
На Рис.4 представлен пример результатов статистического моделирования заявляемого способа слежения за фазой: зависимость от времени а) частоты, b) скорости изменения частоты, с) ошибки оценки фазы.
На Рис.5 представлена функциональная схема заявляемого многопараметрического устройства слежения за слабыми сигналами в условиях сверхвысокой динамики объекта.
На Рис.6 представлена функциональная схема заявляемого приемника спутниковой навигации с устройством слежения за слабыми сигналами в условиях сверхвысокой динамики объекта.
Источники информации
1. "Глобальная Навигационная Спутниковая Система - ГЛОНАСС. Интерфейсный контрольный документ. КНИЦ МО РФ", 2002.
2. Interface Control Document ICD-GPS-200, rev.C, 2003.
3. Van Dierendonck, A.J., "GPS Receivers," in: Global Positioning System: Theory and Applications, Vol I, Parkinson, B.W. and Spilker, J.J. Jr., eds., American Institute of Aeronautics and Astronautics, Washington, 1996, pp.329-407.
4. E.D.Kaplan (ed), Understanding GPS Principles and Applications, Artech House, Boston, 1996
5. P.W.Ward. Performance Comparisons Between FLL, PLL, and a Novel FLL-Assisted-PLL Carrier Tracking Loop Under RF Interference Conditions. Proceedings of the 11th International Technical Meeting of the Satellite Division of The Institute of Navigation ION GPS-98, Sep.15-18, 1998, pp.783-795
6. Б.Р.Левин. Теоретические основы статистической радиотехники. М., Сов. радио, 1968.
7. Г.Корн, Т.Корн. Справочник по математике. Наука, М., 1978.
8. D.K.Shaeffer, T.H.Lee. The Design and Implementation of Low-Power CMOS Radio Receivers. Kluwer Academic Publishers, Boston/Dordrecht/London, 1999.
9. Raymond A. Eastwood "An Integrated GPS/Glonass receiver". - "Navigation" (USA), 1990, 2, - pp.141-151.
Группа изобретений относится к приемникам сигналов спутниковых радионавигационных систем GPS и ГЛОНАСС открытого кода частотного диапазона L1. Технический результат заключается в обеспечении надежного слежения за сигналами уровня 30 дБГц без срывов при рывке до 8000 G/c, что соответствует на 9.5 дБ более высокой чувствительности в тех же динамических условиях. Приемник содержит радиочастотный преобразователь, N канальный цифровой коррелятор, N канальное устройство цифровой обработки корреляционных отсчетов с многопараметрическим устройством слежения, содержащим сдвиговый регистр комплексного входного сигнала, ПЗУ значений ортогональных полиномов, совокупность цифровых блоков формирования опорного сигнала, блоков формирования корреляции входного и опорного сигнала в скользящем окне и других цифровых блоков и их связей, в совокупности обеспечивающих итерационный процесс нахождения максимально правдоподобных оценок амплитуды, фазы, частоты и скорости изменения частоты сигнала. 2 н. и 3 з.п. ф-лы, 6 ил.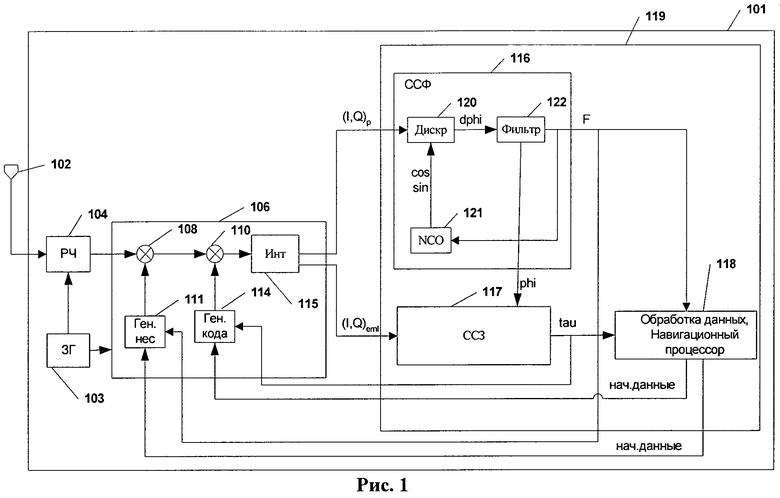
1. Способ слежения за фазой навигационного сигнала, основанный на оценках четырех параметров выходного сигнала коррелятора, а именно, амплитуды, фазы, частоты и скорости изменения частоты, причем эти оценки выполняются по методу максимального правдоподобия (МП) в скользящем временном окне, а фаза навигационного сигнала в скользящем временном окне множества точек временной дискретизации навигационного сигнала представляется в виде взвешенной суммы полиномов, ортогональных на указанном множестве точек, а вес при полиноме первой степени однозначно связан с частотой сигнала, и вес при полиноме второй степени однозначно связан со скоростью изменения частоты сигнала.
2. Способ по п. 1, в котором оценки метода максимального правдоподобия определяются итеративным методом, причем на каждом шаге итераций выполняются следующие операции:
формирование опорного комплексного сигнала с модулем, равным единице, и аргументом, равным упомянутой в п. 1 взвешенной сумме полиномов;
формирование суммы произведений входного комплексного сигнала на комплексно-сопряженный опорный сигнал, причем суммирование распространяется на текущее временное окно, а полученная сумма в дальнейшем будет обозначена как α;
формирование суммы произведений входного комплексного сигнала на комплексно-сопряженный опорный сигнал и на значения вышеупомянутого полинома первой степени, причем суммирование распространяется на текущее временное окно, а полученная сумма в дальнейшем будет обозначена как β1;
формирование суммы произведений входного комплексного сигнала на комплексно-сопряженный опорный сигнал и на квадрат значений вышеупомянутого полинома первой степени, причем суммирование распространяется на текущее временное окно, а полученная сумма в дальнейшем будет обозначена как γ1;
формирование суммы произведений входного комплексного сигнала на комплексно-сопряженный опорный сигнал и на значения вышеупомянутого полинома второй степени, причем суммирование распространяется на текущее временное окно, а полученная сумма в дальнейшем будет обозначена как β2;
формирование суммы произведений входного комплексного сигнала на комплексно-сопряженный опорный сигнал и на квадрат значений полинома
второй степени, причем суммирование распространяется на текущее временное окно, а полученная сумма в дальнейшем будет обозначена как γ2;
формирование оценки амплитуды сигнала как А=|α|/N, где N - количество отсчетов сигнала коррелятора в скользящем окне;
формирование оценки фазы сигнала в виде аргумента комплексного числа α;
формирование величины коррекции оценки веса при полиноме первой степени в виде мнимой части произведения β1 на комплексно-сопряженное значение α, деленной на разность между квадратом модуля β1 и действительной частью произведения γ1 на комплексно-сопряженное значение α:
формирование величины коррекции оценки веса при полиноме второй степени в виде мнимой части произведения β2 на комплексно-сопряженное значение α, деленной на разность между квадратом модуля β2 и действительной частью произведения γ2 на комплексно-сопряженное значение α:
формирование скорректированных оценок весов как сумм текущих оценок и вышеупомянутых коррекций.
3. Способ по п. 2, в котором в качестве начального приближения для веса при полиноме первой степени для итераций в текущем окне берется значение веса при полиноме первой степени в последней итерации предыдущего окна, увеличенное на удвоенный вес при полиноме второй степени в последней итерации предыдущего окна, а в качестве начального приближения для веса при полиноме второй степени для итераций в текущем окне берется значение веса при полиноме второй степени в последней итерации предыдущего окна.
4. Приемник спутниковой навигации с многопараметрическим устройством слежения за слабыми сигналами в условиях сверхвысокой динамики объекта, содержащий задающий генератор, последовательно соединенные радиочастотный преобразователь, вход которого образует сигнальный вход приемника, многоканальный цифровой коррелятор, многоканальное устройство цифровой обработки корреляционных отсчетов и навигационный процессор, первый вход которого соединен с выходом системы слежения за задержкой многоканального устройства цифровой обработки корреляционных отсчетов, причем каждый канал цифрового коррелятора содержит входной мультиплексор GPS/ГЛОНАСС, генератор несущей, смеситель несущей, генератор кода, смеситель кода и интегратор, а каждый канал многоканального устройства цифровой обработки корреляционных отсчетов содержит генератор временной шкалы канала, вход которого соединен с выходом задающего генератора, и систему слежения за задержкой, отличающийся тем, что в каждый канал многоканального устройства цифровой обработки корреляционных отсчетов дополнительно вводится первое многопараметрическое устройство слежения, сигнальный вход которого соединен с прямым (Prompt) выходом соответствующего корреляционного канала, а вход синхронизации соединен с первым выходом генератора временной шкалы канала, генератор меандра, вход которого соединен со вторым выходом генератора временной шкалы канала, перемножитель, один вход которого соединен с прямым (Prompt) выходом соответствующего корреляционного канала, а второй вход соединен с выходом генератора меандра, второе многопараметрическое устройство слежения, сигнальный вход которого соединен с выходом перемножителя, а вход синхронизации соединен с первым выходом генератора временной шкалы канала, блок выбора максимума, один вход которого соединен с выходом оценки квадрата амплитуды первого многопараметрического устройства слежения, второй вход соединен с выходом оценки квадрата амплитуды второго многопараметрического устройства слежения, а выход соединен со вторым входом навигационного процессора, первый мультиплексор, первый вход которого соединен с выходом оценки частоты первого многопараметрического устройства слежения, второй вход соединен с выходом оценки частоты второго многопараметрического устройства слежения, вход управления соединен с выходом блока выбора максимума, а выход соединен с входом управления генератора несущей соответствующего корреляционного канала и с третьим входом навигационного процессора, и второй мультиплексор, первый вход которого соединен с выходом оценки фазы первого многопараметрического устройства слежения, второй вход соединен с выходом оценки фазы второго многопараметрического устройства слежения, вход управления соединен с выходом блока выбора максимума, а выход соединен с входом управления системы слежения за задержкой и с четвертым входом навигационного процессора.
5. Приемник по п. 4, в котором многопараметрическое устройство слежения содержит синхронизатор, вход которого является входом синхронизации многопараметрического устройства слежения, сдвиговый регистр комплексного сигнала, вход которого является сигнальным входом многопараметрического устройства слежения, первое, второе, третье и четвертое запоминающие устройства, входы адресации которых соединены с первым выходом синхронизатора, первый перемножитель, первый вход которого соединен с выходом первого запоминающего устройства, второй перемножитель, первый вход которого соединен с выходом второго запоминающего устройства, первый сумматор, один вход которого соединен с выходом первого перемножителя, а второй вход соединен с выходом второго перемножителя, третий перемножитель, один вход которого соединен с выходом первого сумматора, а второй вход соединен с выходом сдвигового регистра комплексного сигнала, первый накапливающий сумматор, вход которого соединен с выходом третьего перемножителя, первый блок формирования квадрата модуля комплексного сигнала, вход которого соединен с выходом первого накапливающего сумматора, а выход является выходом квадрата амплитуды многопараметрического устройства слежения, блок формирования аргумента комплексного сигнала, вход которого соединен с выходом первого накапливающего сумматора, а выход является выходом фазы многопараметрического устройства слежения, четвертый перемножитель, один вход которого соединен с выходом третьего перемножителя, а второй вход соединен с выходом первого запоминающего устройства, второй накапливающий сумматор, вход которого соединен с выходом четвертого перемножителя, пятый перемножитель, один вход которого соединен с выходом первого накапливающего сумматора, а второй вход соединен с выходом второго накапливающего сумматора, первый блок формирования мнимой части комплексного сигнала, вход которого соединен с выходом пятого перемножителя, шестой перемножитель, один вход которого соединен с выходом третьего перемножителя, а второй вход соединен с выходом второго запоминающего устройства, третий накапливающий сумматор, вход которого соединен с выходом шестого перемножителя, седьмой перемножитель, один вход которого соединен с выходом первого накапливающего сумматора, а второй вход соединен с выходом третьего накапливающего сумматора, первый блок формирования действительной части комплексного сигнала, вход которого соединен с выходом седьмого перемножителя, восьмой перемножитель, один вход которого соединен с выходом третьего перемножителя, а второй вход соединен с выходом третьего запоминающего устройства, четвертый накапливающий сумматор, вход которого соединен с выходом восьмого перемножителя, девятый перемножитель, один вход которого соединен с выходом первого накапливающего сумматора, а второй вход соединен с выходом четвертого накапливающего сумматора, второй блок формирования мнимой части комплексного сигнала, вход которого соединен с выходом девятого перемножителя, десятый перемножитель, один вход которого соединен с выходом третьего перемножителя, а второй вход соединен с выходом четвертого запоминающего устройства, пятый накапливающий сумматор, вход которого соединен с выходом десятого перемножителя, одиннадцатый перемножитель, один вход которого соединен с выходом первого накапливающего сумматора, а второй вход соединен с выходом пятого накапливающего сумматора, второй блок формирования действительной части комплексного сигнала, вход которого соединен с выходом одиннадцатого перемножителя, второй блок формирования квадрата модуля комплексного сигнала, вход которого соединен с выходом второго накапливающего сумматора, первый блок вычитания, у которого вход уменьшаемого соединен с выходом второго блока формирования квадрата модуля комплексного сигнала, а вход вычитаемого соединен с выходом первого блока формирования действительной части комплексного сигнала, первый ограничитель, вход которого соединен с выходом первого блока вычитания, первый блок деления, у которого вход делимого соединен с выходом первого блока формирования мнимой части комплексного сигнала, а вход делителя соединен с выходом первого ограничителя, шестой накапливающий сумматор, вход которого соединен с выходом первого блока деления, третий блок формирования квадрата модуля комплексного сигнала, вход которого соединен с выходом четвертого накапливающего сумматора, второй блок вычитания, у которого вход уменьшаемого соединен с выходом третьего блока формирования квадрата модуля комплексного сигнала, а вход вычитаемого соединен с выходом второго блока формирования действительной части комплексного сигнала, второй ограничитель, вход которого соединен с выходом второго блока вычитания, второй блок деления, у которого вход делимого соединен с выходом второго блока формирования мнимой части комплексного сигнала, а вход делителя соединен с выходом второго ограничителя, седьмой накапливающий сумматор, вход которого соединен с выходом второго блока деления, а выход соединен со вторым входом второго перемножителя, умножитель на два, вход которого соединен с выходом седьмого накапливающего сумматора, второй сумматор, один вход которого соединен с выходом шестого накапливающего сумматора, а второй вход соединен с выходом умножителя на два, и мультиплексор, первый сигнальный вход которого соединен с выходом второго сумматора, второй сигнальный вход соединен с выходом шестого накапливающего сумматора, вход управления соединен с входом синхронизации многопараметрического устройства слежения, а выход соединен со вторым входом первого перемножителя и является выходом частоты многопараметрического устройства.
| Колосоуборка | 1923 |
|
SU2009A1 |
| СПОСОБ ПОДАВЛЕНИЯ ОШИБОК МНОГОЛУЧЕВОСТИ В ПРИЕМНИКЕ СПУТНИКОВОЙ НАВИГАЦИИ | 2010 |
|
RU2432585C1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| P.W.Ward | |||
| Performance Comparisons Between FLL, PLL, and a Novel FLL-Assisted-PLL Carrier Tracking Loop Under RF Interference Conditions | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |

