Изобретение относится к механизиованному инструменту ударного дейтвия в частности к гайковертам моет быть использовано в различных от- JQ раслях промьппленности для сборки и разборки резьбовых соединений,Известен ударный гайковерт, содержащий корпус, размещенные в нем привод , шпиндель-наковальню с голов- 25 кой под ключ на одном конце и рабочи- и кулачками и шлицевым валиком на другом конц е, связанный с выходным валом привода составной ударник, вклю- ведущую часть и размещенные в о ней с возможностью совместного вращения и относительного осевого перемещения ударные пальцы, соединенные между собой подпружиненным в осевом направлении поводком, у станоетенным на шли- цевом валике и имеющим на торце профильную дорожку и шарик, размещенный между ударш-1ком и поводком и взаимодействующий с профильной дорожкой.
Недостаток ударного гайковерта за- Q ключается в том, что ударные импульсы, передаваемые на затягиваемое резьбовое соединение, следуют друг за другом через оборот, поэтому невозможно получить большую окружную скорость 45 ударшка и, как следствие этого,.большую энергию удара.
Наиболее близким по техшческой сущности к изобретению является удар- ньй гайковерт,, содержащий корпус, раз мещенные в нем привод с валом, шпин- дель-наковапьшо с головкой под ключ на одном ковде и рабочими кулачками на другом установленный на валу УДар- ник, зафиксированный от осевого пере- - мещения и имеющий диаметрально рас- . положенные продол-ьные отверстия, установленные в последних ударные пальцы, взаимодействующие с рабочими ку
лачками и соединенные между собой под пружиненным к ударнику поводком, кинематически связанным с приводным валом,
Однако из-за жесткой связи поводка с ударными пальцами пос)1едние перемещаются к шпинделю-наковальне по винтовой линии, поэтому имеет место косой удар и связанные с ним потеря энергии, повышенный износ и высокий уровень вибрации.
Цель изобретения - повышение эффективности, надежности и снижение
вибрации.
Поставленная цель достигается за счет того, что в гайковерте, содержащем корпус, размещенные в нем привод с валом, шпиндель-наковапьню с головкой под ключ на одном конце и рабочими кулачками на другом, установлен- тш на валу ударник, зафиксированный от осевого перемещения и имеюпцта диаметрально расположенные продольные отверстия, установленные в последних ударные пальцы, взаимодействующие с рабочими кулачками и соединенные между собой подпружиненным к ударнику поводком, кинематически связанным с валом посредством разобщающего механизма, ударные пальцы подпружинены относительно поводка в сторону шпинделя-наковальни.
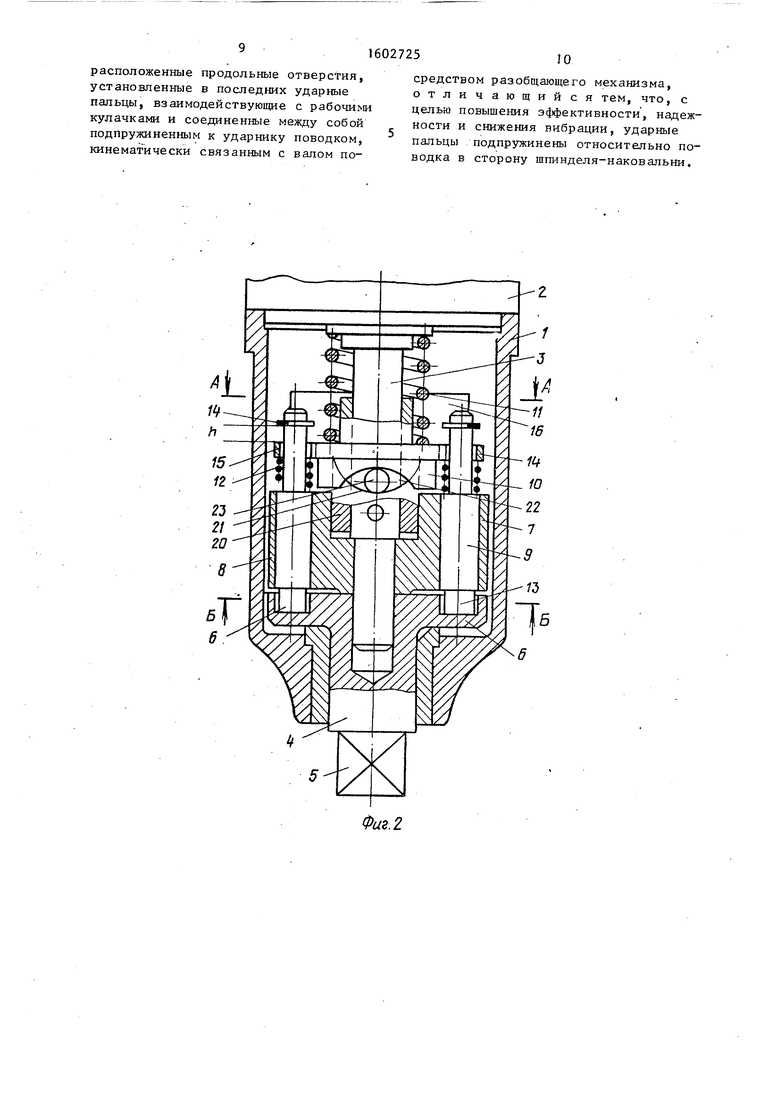
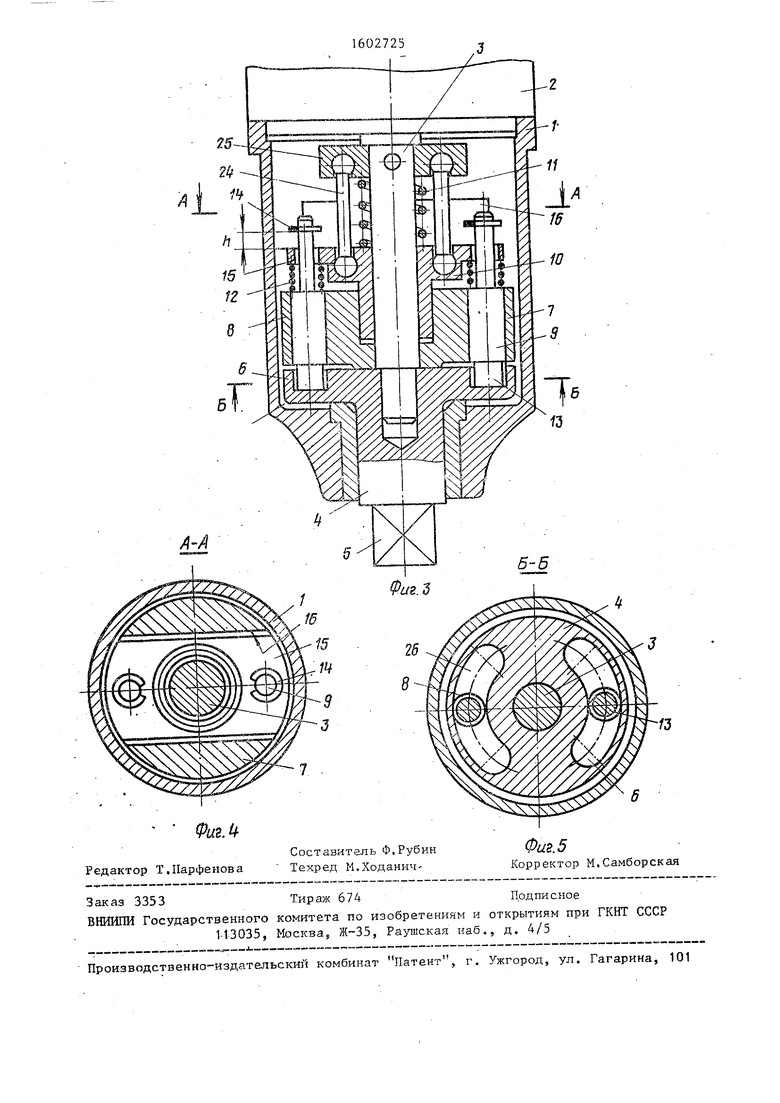
На фиг. 1 изображен ударный гайковерт, общий вид, продольный разрез; на фиг. 2, 3 - то же, с-различными вариантами выполнения разобщающего- механизма, продольный разрез; на 4иг. 4 - разрез А-А на фиг. 1; на фиг. 5 - разрез Б-Б на Лиг. 1.
Ударный гайковерт содержит корпус 1, размещенные в нем привод 2 с валом 3, шпиндель-наковальню 4 с головкой 5 под ключ на одном конце и рабо5160
чими кулачками б на другом. На валу 3 установлен ударник 7, который зафиксирован от осевого перемещения и имеет диметрапьно расположенные продольные отверстия 8, В продольных отверстиях 8 установлены ударные пальцы 9, которые соединены между собой поводком 10, который охватывает вал 3 и поджимается пружиной 11 в сторону ударника 7. Ударные пальцы 9 подпружинены относительно поводка 10 пружиной 12 в сторону шпинделя-наковсольни и имеют на конце, обращенном к рабо
чим кулачкам рабочий участок 13, а на , ледний, вращаясь, передает крутя дий другом - упор 14, который периодичен- момент через головку 5 под ключ (не ки взаимодействует с торцом поводка Ю. Поводок 10 может перемещаться отпоказан) на rai iKy затяп-iBaeMoro сое динения (не показана). По мере завер тывания гайки сопротивление вращению
носительно ударника 7 и имеет с ним
После установки торцового ключа (не показан) на гайку затягиваемого резьбового соединения (не показан) включают привод 2, при этом вращение через вал 3, V-образную канавку 17, шарик 19 и V-образную канавку 18 (4я1г, I) передается на поводок 10 и через его фланец 15 и. паз 16 на ударник 7. Совместно с ударником 7 и поводком 10 вращаются ударные пальцы 9. Поскольку рабочие участки 13 пальцев 9 взаимодействуют с рабочими кулачками 6 шпинделя-наковальни 4, то последний, вращаясь, передает крутя дий момент через головку 5 под ключ (не
показан) на rai iKy затяп-iBaeMoro соединения (не показана). По мере завертывания гайки сопротивление вращению
| название | год | авторы | номер документа |
|---|---|---|---|
| Ударный гайковерт | 1985 |
|
SU1524993A1 |
| Ударный гайковерт | 1986 |
|
SU1600942A1 |
| Ударный гайковерт | 1986 |
|
SU1362615A1 |
| Пневматический ударный гайковерт | 1981 |
|
SU1018843A1 |
| Ударный гайковерт | 1982 |
|
SU1118522A1 |
| Ударный гайковерт | 1982 |
|
SU1021591A1 |
| Ударный гайковерт | 1981 |
|
SU1004092A1 |
| Ударный механизм гайковерта | 1982 |
|
SU1079423A1 |
| Ударный механизм гайковерта | 1980 |
|
SU967794A1 |
| Ударный гайковерт | 1980 |
|
SU893511A1 |
Изобретение относится к механизированному инструменту ударного действия. Цель изобретения - повышение эффективности, надежности и снижение вибрации. При включении привода 1 вращение его выходного вала 3 через поверхность V-образных канавок 17 и 18 выходного вала 3 и фланца 15 соответственно шарики 19, фланец 15 поводка 10 и дарные пальцы 9 передается на шпиндель-наковальню 4, который осуществляет затяжку резьбового соединения. При возрастании сопротивления в резьбе затягиваемого разьбового соединения шпиндель-наковальня останавливается, а выходной вал продолжает вращаться. При этом шарики 19 перекатываются по поверхностям V-образных канавок 17 и 18. В результате поводок 10 перемещается в осевом направлении и фланцем 15 перемещает ударные пальцы 9 с рабочими участками 13, которые выходят из зацепления с рабочими кулачками шпинделя-наковальни 4. Поводок 10 начинает ускоренно вращаться и одновременно перемещаться в сторону шпинделя-наковальни 4 под действием пружины 11. В случае если рабочие участки 13 торцами будут взаимодействовать с торцами рабочих кулачков 6 шпинделя-наковальни, то при их сходе друг с друга под действием пружины 12 ударные пальцы 9 перемещаются в осевом направлении и их рабочие участки 13 наносят удар по рабочим кулачкам 6 шпинделя-наковальни. 5 ил.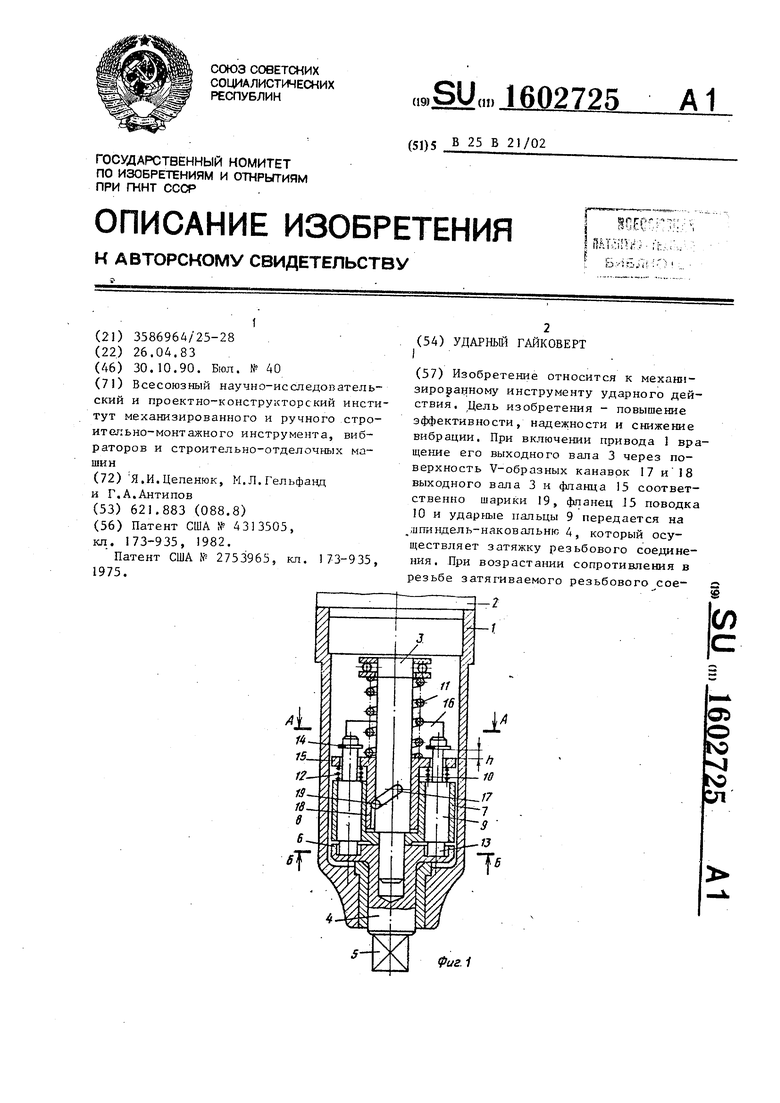
совместное вращение за счет того, что 20 в резьбовом соединении возрастает и
его фланец 15 выполнен, например, прямоугольной формы и размещен в ответном пазу 16 ударника 7.
. Поводок 10 кинематически связан с приводным валом 3 посредством разобщающего механизма, который выполнен в виде V-образных канавок 17 и 18 (фиг. I), размещенных соответственно на валу 3 и внутренней поверхнос35
ка 10 скользит по пазу 16 ударника 7, а пружин а 11 сжимается. После того, как выбирается зазор h, фпанец 15 поводка 10 взаимодействует торцом с упорами 14 и пальцы 9 начинают совместно с поводком 10 перемещаться в осевом напрагзлении от ударника 7 и шпинделя-наковальни 4, при этом происходит расцепление pa6o4iix дл участков 13 ударных пальцев 9 с рабочими кулачками 6 шпинделя-наковальни 4.
ти поводка 10 и направленных в проти- зо ударника 7, при этом 4шанец 15 повод- воположные стороны, и шарика 19, взаимодействующего с V-образными канавками 17 и 18. По другому варианту (фиг. 2) разобщающий механизм выполнен в виде жестко соединенной с валом 3 втулки 20, имеющей на торце, обращенном к поводку 10, цилиндрическую поверхность 21, идентичную цилиндри- ческой поверхности 22 на торце поводка 10, обращенного в сторону втулки 20 и шариков 23, размещенных между цилиндрическими поверхностями 21 и 22. По следующему варианту (фиг. ,3) разобщающий механизм выполнен в виде стержней 24, концы которых шарнирно
-соединены с поводком 10 и втулкой 25, жестко соединенной с валом 3.
Рабочие кулачки 6 шпинделя-наковальни 4 образованы перемычкой между дуговыми пазами 26, выполненными на торце шпинделя-наковальни 4. Ударные пальцы 9, торцами рабочих участков 13 взаимодействует с плоской поверхностью пазов 26, при этом их упор 14 отстоит от торца фланца 15 поводка 10
,на расстоянии h.
45
50
После этого поводок 10 и ударьшк 7 вместе с yдapны и пальцами 9 начинают вращаться совместно с валом 3, однако осевое перемещение поводка 10 и пальцев 9 в сторону от шпинделя-наковальни 4 вследствие инерционности будет продолжаться до тех пор, пока скорость вращения поводка 10 и ударника 7 не сравняется со скоростью вращения вала 3. Затем под действием пружины 1I поводок 10 совместно с 55 ударными пальцами 9, поджатыми пружинами 12, начинает перемещаться относительно ударника 7 в исходное положение, при этом фланец 15 поводка 10 перемещается вдоль паза 16 ударника
Ударный гайковерт работает следующим образом..
шпиндель-наковальня 4 затормаживается. В связи с этим затормаживаются во вращательном движении ударные пальцы 9, ударник 7 и поводок 0.
Поскольку вал 3 продолжает вращаться, то в результате взаимодействия V-образной канавки 17, шариков 19 и V-образной канавки 18, поводок 10 перемещается в.осевом направлении от
35
ка 10 скользит по пазу 16 ударника 7, а пружин а 11 сжимается. После того, как выбирается зазор h, фпанец 15 поводка 10 взаимодействует торцом с упорами 14 и пальцы 9 начинают совместно с поводком 10 перемещаться в осевом напрагзлении от ударника 7 и шпинделя-наковальни 4, при этом происходит расцепление pa6o4iix дл участков 13 ударных пальцев 9 с рабочими кулачками 6 шпинделя-наковальни 4.
зо ударника 7, при этом 4шанец 15 повод-
После этого поводок 10 и ударьшк 7 вместе с yдapны и пальцами 9 начинают вращаться совместно с валом 3, однако осевое перемещение поводка 10 и пальцев 9 в сторону от шпинделя-наковальни 4 вследствие инерционности будет продолжаться до тех пор, пока скорость вращения поводка 10 и ударника 7 не сравняется со скоростью вращения вала 3. Затем под действием пружины 1I поводок 10 совместно с ударными пальцами 9, поджатыми пружинами 12, начинает перемещаться относительно ударника 7 в исходное положение, при этом фланец 15 поводка 10 перемещается вдоль паза 16 ударника
вза41модействующе1 с у-образными ка- .Q ранее описанный
навками 17 и 18. Совместное осевое. перемещение повод1 а JO и ударных пальцев 9 продолжается до тех пор пока торцовые поверхности рабочих участков
По исполнения, изображенному на фиг, 3,стержни 24, шарнирно- закрепленные в. поводке 10 и во втулке 25, жестко соединенной с приводным
13 пальцев 9 не соприкоснутся с тор- j валом 3, обеспечивают непрерывное вра25
30
цами рабочих кулачков 6 шпинделя-на- . }говальни 4, В этот момент во вращательном движении участвуют поводок 10, ударные пальцы 9 и ударник- 7, а осевое перемещение по направлению к шпин- д делю-наковальне 4 осуществляет только поводок 10, при этом между упорами 14 пальцев.9.и торцом фланца 15 поводка 10 образуется зазор, а торцы рабочих участков 13 ударных пальцев 9 проскальзывают по торцам рабочих кулачков 6. Осевое перемещеше ударных пальцев 9 не будет осуществляться до тех пор, пока торцы рабочих участков 13 не выйдут из контакта с TopuaNH рабочих кулачков 6 и- не окажутся над дз. гoвы и пазами 26. После этого ударные пальцы 9 под действием пружины 12 перемещаются в осевом направлений до тех пор, пока не соприкоснутся .с торцо- з выми поверхностями дуговых пазов шпинделя-наковальни 4. В дальнейшем ударные пальцы 9 вращаются совместно с ударником 7 до тех пор, пока не произойдет удар, при котором кинетическая энергия разогнашшх масс ударника 7, ударных пальцев 9 и поводка 10 через рабочие участки 13 9 передается рабочим кулачкам 6 шпинделя-наковальни 4 и далее на.затягиваемое резьбовое соединение (не показано) , где преобразуется to. работу за- тяжкИ. До тех пор, пока включен привод 2, удары периодически повторяются и гайковерт Работает в описанной , последовател ьности. Вследствие того, что непосредственно после удара ударные пальцы 9 выходят из зацепления с ударными поверхностями 7 только после TorOj как поводок 10 выберет : зазор li, возможнь е отскоки ударника 4 после удара не оказывают существен- .ного влияния на -описанное взаимодействие деталей.
щение приводного вала 3 при перемещениях поводка 10 в момент удара. Так, после затормаживания шпинделя-нако-. вальни 4, а также ударника 7 .и ударных пальцев- 9 , вследствие того, что вал 3 продолжает вращаться, стержни 24 перекашиваются в.шарнирах и поводок 10 перемещается в сторону от. ударника 7, сжимая пружину .11. После рас- .цепления ударных пальцев 9 с рабочими кулачками 6 поводок Ю, ударник 7 и ударные пальцы 9 начинают вращаться и после, того, как о;-ш приобретут скорость вала 3, под действием пружины 11 поводок Ш и ударные пальцы 9 начинают перемещаться по направлению к шпинделю-наковальне 4 до осуществления удара, при этом взаимодействие деталей происходит в описанной последовательности. В момент удара стержни 24 устанавливаются в первоначальное положение, и далее удары периодичес- ки повторяются.
За счет того, что ударные пальцЫ подпружинены относительно поводка в сторону шпинделя-наковальни траектория их движения не связана с винтовой траекторией движения поводка, а это позволяет осуществить прямой удар 45 удар1Л1х пальцев по рабочим кулачкам шпинделя-наковальни, при этом уменьшается уровень вибрации и повышается эффективность работы гайковерта и его Надежность.
40
50
55
Формула
изобретения
Ударный гайковерт, содержащий корпус, размещенные в нем привод с валом, шпиндель-наковальню с головкой под ключ на одном конце и рабочими кулачками на другом, установленный на ва- ;лу ударник, зафиксированный от осевого перемещения и имеющий диаметрально
5
По другому варианту исполнения (фиг. 2) роль V-образных канавок 17 и 18 (фиг. 1) выполняют соответственно цилиндрические поверхности 21 и 22J обеспечивающие непрерывное вращение приводного вала 3 при перемещениях поводка 10 в момент удара. В.остальном этот вариант работает, как и
ранее описанный
По исполнения, изображенному на фиг, 3,стержни 24, шарнирно- закрепленные в. поводке 10 и во втулке 25, жестко соединенной с приводным
валом 3, обеспечивают непрерывное вра5
0
д з
щение приводного вала 3 при перемещениях поводка 10 в момент удара. Так, после затормаживания шпинделя-нако-. вальни 4, а также ударника 7 .и ударных пальцев- 9 , вследствие того, что вал 3 продолжает вращаться, стержни 24 перекашиваются в.шарнирах и поводок 10 перемещается в сторону от. ударника 7, сжимая пружину .11. После рас- .цепления ударных пальцев 9 с рабочими кулачками 6 поводок Ю, ударник 7 и ударные пальцы 9 начинают вращаться и после, того, как о;-ш приобретут скорость вала 3, под действием пружины 11 поводок Ш и ударные пальцы 9 начинают перемещаться по направлению к шпинделю-наковальне 4 до осуществления удара, при этом взаимодействие деталей происходит в описанной последовательности. В момент удара стержни 24 устанавливаются в первоначальное положение, и далее удары периодичес- ки повторяются.
За счет того, что ударные пальцЫ подпружинены относительно поводка в сторону шпинделя-наковальни траектория их движения не связана с винтовой траекторией движения поводка, а это позволяет осуществить прямой удар 5 удар1Л1х пальцев по рабочим кулачкам шпинделя-наковальни, при этом уменьшается уровень вибрации и повышается эффективность работы гайковерта и его Надежность.
0
Формула
изобретения
Ударный гайковерт, содержащий корпус, размещенные в нем привод с валом, шпиндель-наковальню с головкой под ключ на одном конце и рабочими кулачками на другом, установленный на ва- ;лу ударник, зафиксированный от осевого перемещения и имеющий диаметрально
расположенные продольные отверстия, установленные в последних ударные пальцы, взаимодействующие с рабочими кулачками и соединенные между собой подпружиненным к ударнику поводком, кинемат ически связанным с валом по1602725
10
средством разобщающего механизма, отличающийся тем, что, с целью повышения э4)фективности , надежности и снижения вибрации, ударные пальцы подпружинены относительно поводка в сторону шпинделя-наковальни.
мг.
Редактор Т.Парфенова
Составитель Ф.Рубин Техред М.ХоданиЧ
1602725
Фи2.5
Корректор М.Самборская
| Патент США № 4313505, кл | |||
| Джино-прядильная машина | 1922 |
|
SU173A1 |
| ХИМЕРНЫЕ АНТИГЕННЫЕ РЕЦЕПТОРЫ И СПОСОБЫ ИХ ПОЛУЧЕНИЯ | 2015 |
|
RU2753965C2 |
| Джино-прядильная машина | 1922 |
|
SU173A1 |
