Фаг. 2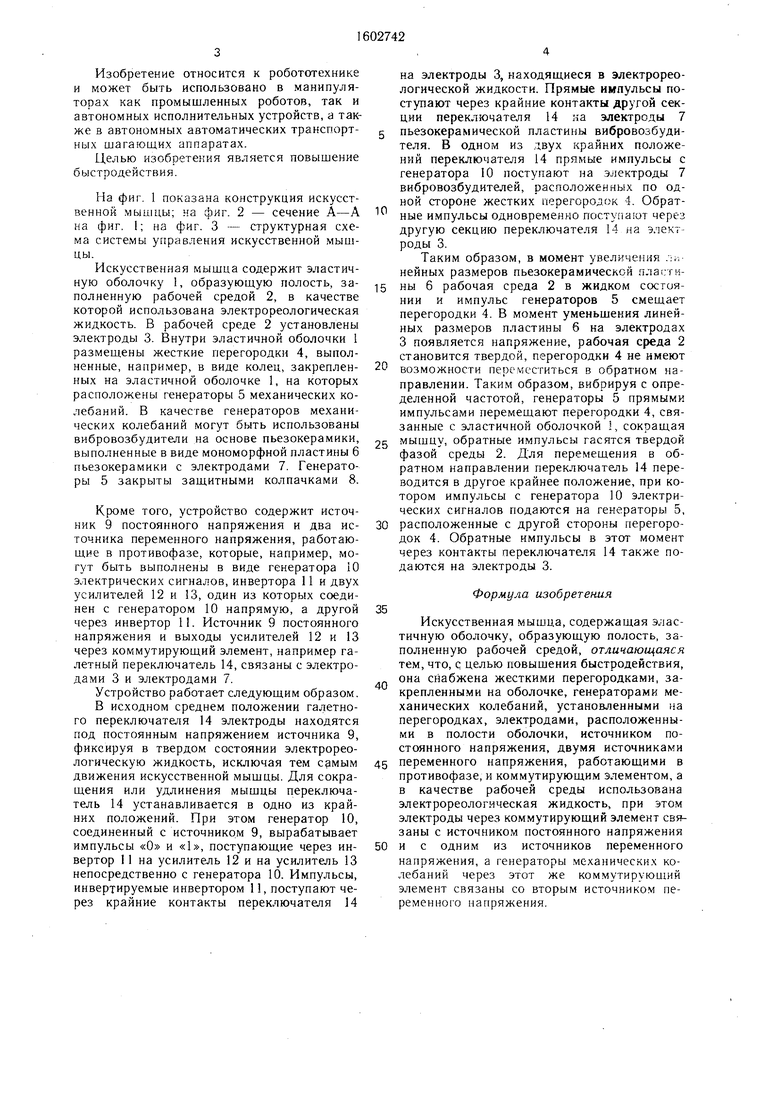
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1989 |
|
SU1673438A1 |
| Манипулятор | 1989 |
|
SU1673429A1 |
| Электродвигатель | 1989 |
|
SU1681369A1 |
| Бионический экзоскелет | 2017 |
|
RU2645804C1 |
| МОНИТОР ВРЕДНЫХ ВОЗДЕЙСТВИЙ НА ОРГАНИЗМ ФАКТОРОВ ОКРУЖАЮЩЕЙ СРЕДЫ (МОНИТОР КАРАШУРОВА С.Е.) | 2004 |
|
RU2279297C2 |
| Пресс непрерывного действия (его варианты) | 1981 |
|
SU1017508A1 |
| МАГНИТОЭЛЕКТРОРЕОЛОГИЧЕСКИЙ ЭЛАСТОМЕР | 2014 |
|
RU2603196C2 |
| Глазной фиксатор | 1982 |
|
SU1082427A1 |
| Акустическая линза | 1982 |
|
SU1122374A1 |
| Электрическое двигательное устройство | 1989 |
|
SU1697235A1 |
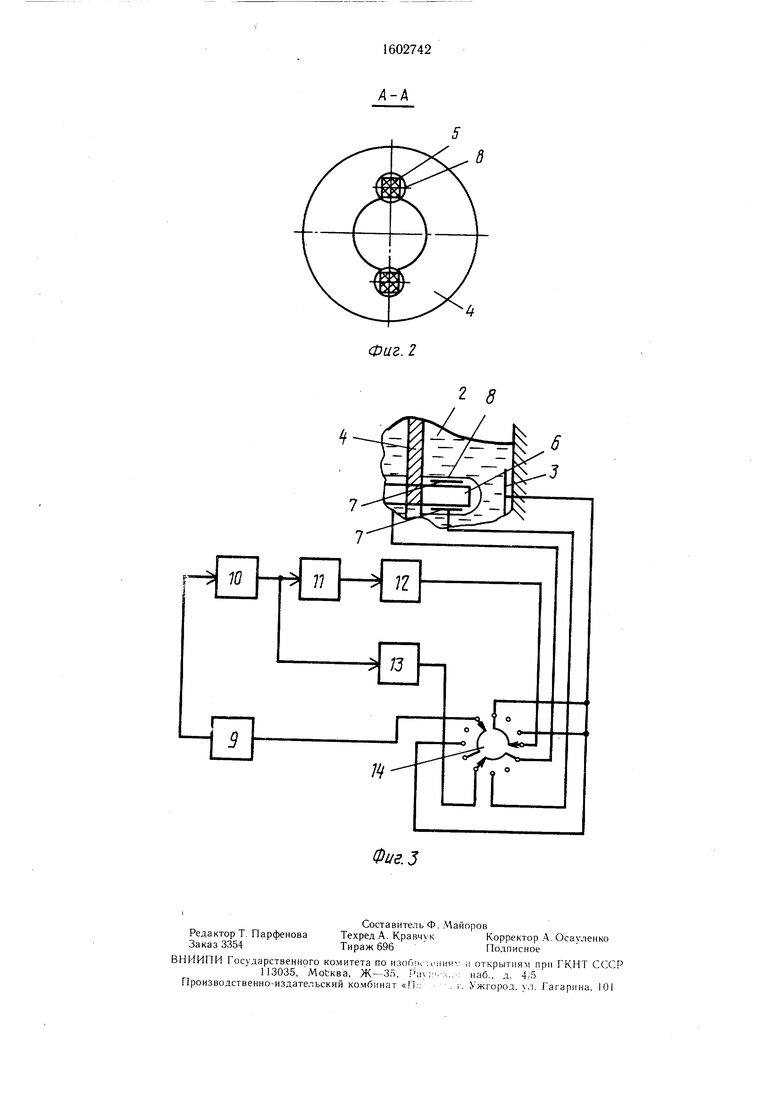
Изобретение относится к робототехнике и может быть использовано в манипуляторах как промышленных роботов, так и автономных исполнительных устройств, а также и автономных транспортных шагающих аппаратах. Целью изобретения является повышение быстродействия. Искусственная мышца содержит эластичную оболочку 1, образующую полость, заполненную электрореологической жидкостью, в которой установлены электроды. В оболочке размещены жесткие перегородки 4, связанные с оболочкой, по периметру которых расположены генераторы 5 механических колебаний. Подачей напряжения на электроды в такт с механическими импульсами генераторов, причем так, что движущий импульс приходится на жидкую фазу электрореологической жидкости, а обратный импульс на твердую фазу, осуществляется сжатие или растяжение искусственной мышцы. 3 ил.
| Модуль робота | 1987 |
|
SU1397277A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
