Изобретение относится к робототехнике, а более конкретно кустройствам перемещения рук манипуляторов.
Целью изобретения является упрощение процесса управления.
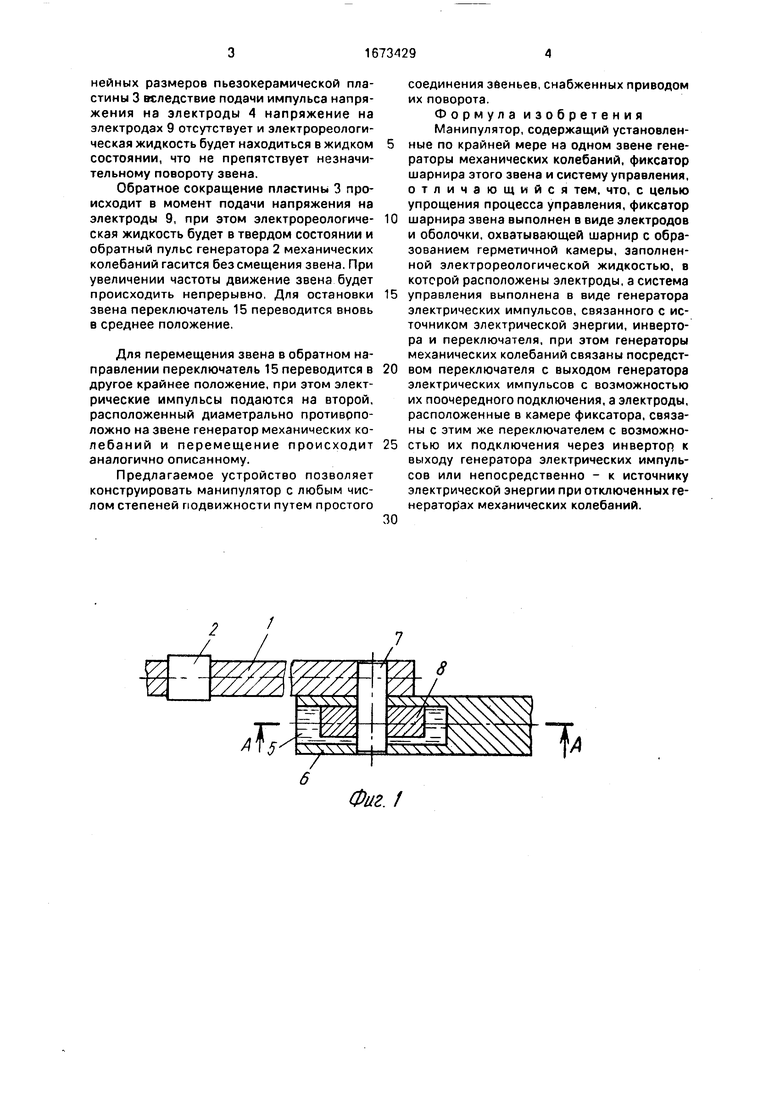
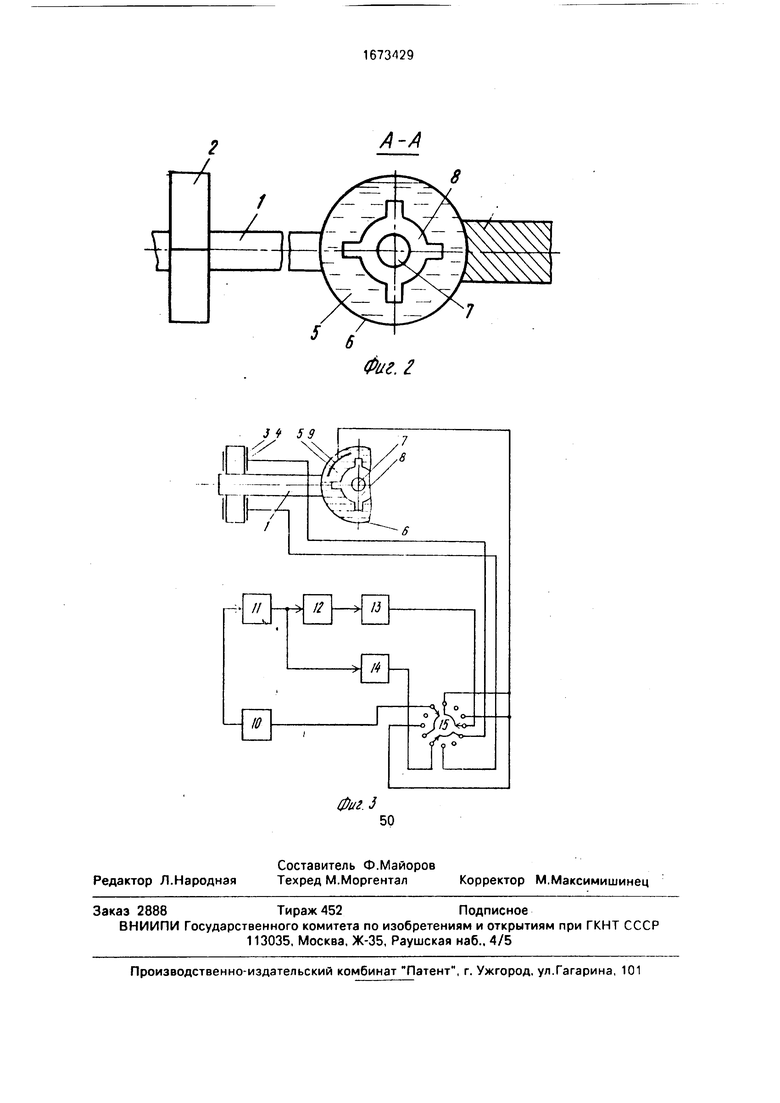
На фиг. 1 показан шарнир, разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - структурная схема системы управления приводом поворота.
Привод поворота звена 1 содержит установленные на этом звене генераторы 2 механических колебаний, выполненные, например, в виде пластин 3 из пьезокерамики с электродами 4, и фиксатор шарнира, состоящий из камеры 5, образованной оболочкой 6, в которой на оси 7 шарнира закреплен барабан 8 со шлицами. Камера 5 заполнена электрореологической жидкостью и в ней расположены электроды 9.
Система управления приводом включает источник 10 электрической энергии, генератор 11 электрических импульсов, инвертор 12, усилители 13 и 14 и переключатель 15, например, галетного типа.
Устройство работает следующим образом.
В исходном положении переключатель 15 находится в среднем положении, электроды 9 связаны-с источником 10 и электрореологическая жидкость находится в твердом состоянии, фиксируя положение звена 1 посредством фиксации барабана 8. Для перемещения звена переключатель 15 переводится в одно из двух крайних положений, при этом прямые импульсы с генератора 11 поступают на электроды 4.
Импульсы, поступающие в этот момент на электроды 9, обратны по амплитуде импульсам, поступающим на электроды 4. Они поступают с генератора 11 через инвертор 12, усилитель 13 и через секцию переключателя 15. Поэтому в момент увеличения лиО
VJ СО
ю ю
нейных размеров пьеэокерамической пластины 3 вследствие подачи импульса напряжения на электроды 4 напряжение на электродах 9 отсутствует и электрореологическая жидкость будет находиться в жидком состоянии, что не препятствует незначительному повороту звена.
Обратное сокращение пластины 3 происходит в момент подачи напряжения на электроды 9, при этом электрореологическая жидкость будет в твердом состоянии и обратный пульс генератора 2 механических колебаний гасится без смещения звена. При увеличении частоты движение звена будет происходить непрерывно, Для остановки звена переключатель 15 переводится вновь в среднее положение.
Для перемещения звена в обратном направлении переключатель 15 переводится в другое крайнее положение, при этом электрические импульсы подаются на второй, расположенный диаметрально противоположно на звене генератор механических ко- лебаний и перемещение происходит аналогично описанному.
Предлагаемое устройство позволяет конструировать манипулятор с любым числом степеней подвижности путем простого
0
5
0
5
0
соединения звеньев, снабженных приводом их поворота.
Формула изобретения Манипулятор, содержащий установленные по крайней мере на одном звене генераторы механических колебаний, фиксатор шарнира этого звена и систему управления, отличающийся тем, что, с целью упрощения процесса управления, фиксатор шарнира звена выполнен в виде электродов и оболочки, охватывающей шарнир с образованием герметичной камеры, заполненной электрореологической жидкостью, в которой расположены электроды, а система управления выполнена в виде генератора электрических импульсов, связанного с источником электрической энергии, инвертора и переключателя, при этом генераторы механических колебаний связаны посредством переключателя с выходом генератора электрических импульсов с возможностью их поочередного подключения, а электроды, расположенные в камере фиксатора, связаны с этим же переключателем с возможностью их подключения через инвертор к выходу генератора электрических импульсов или непосредственно - к источнику электрической энергии при отключенных генераторах механических колебаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1989 |
|
SU1673438A1 |
| Манипулятор | 1986 |
|
SU1333570A1 |
| Захватное устройство | 1989 |
|
SU1726242A1 |
| Способ реконфигурации многоподвижного звена манипулятора | 1988 |
|
SU1678603A1 |
| СИСТЕМА ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ И ТЕЛЕРЕАЛЬНОСТИ | 1995 |
|
RU2131621C1 |
| Резонансный манипулятор | 2024 |
|
RU2840440C1 |
| Искусственная мышца | 1989 |
|
SU1602742A1 |
| Манипулятор | 1991 |
|
SU1821355A1 |
| Шарнир манипулятора | 1985 |
|
SU1298075A1 |
| СХВАТ МАНИПУЛЯТОРА | 1999 |
|
RU2147277C1 |
Изобретение относится к робототехнике, а более конкретно к устройствам перемещения рук манипуляторов. Целью изобретения является упрощение процесса управления. Для поворота звена 1 на оси 7 шарнира возбуждаются механические колебания соответствующего генератора, выполненного в виде пьезокерамической пластины 3 от электрических импульсов, поступающих с генератора 11. При этом на электроды 9, расположенные в камере 5, заполненной электрореологической жидкостью, эти импульсы поступают через инвертор 12, обеспечивая тем самым перемещения звена 1 в одном направлении. Для изменения направления перемещения переключателем 15 импульсы от генератора 11 подаются на другой, расположенный диаметрально противоположно генератор механических колебаний. 3 ил.
тш%&
ъ-/
8
Фиг. I
Г
А-А
эд 1Ш
Фиг, /
| Манипулятор | 1983 |
|
SU1171307A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
