Ё

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1989 |
|
SU1673429A1 |
| Искусственная мышца | 1989 |
|
SU1602742A1 |
| СИСТЕМА ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ И ТЕЛЕРЕАЛЬНОСТИ | 1995 |
|
RU2131621C1 |
| СХВАТ МАНИПУЛЯТОРА | 1999 |
|
RU2147277C1 |
| Модуль манипулятора | 1985 |
|
SU1283086A1 |
| Губка схвата манипулятора | 1989 |
|
SU1798181A1 |
| Электрическое двигательное устройство | 1989 |
|
SU1697235A1 |
| ПРЕЦИЗИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД И СПОСОБ УПРАВЛЕНИЯ ИМ | 1992 |
|
RU2083052C1 |
| Шарнир манипулятора | 1985 |
|
SU1298075A1 |
| Способ реконфигурации многоподвижного звена манипулятора | 1988 |
|
SU1678603A1 |
Изобретение относится к робототехнике, в частности к конструкциям манипуляторов промышленных роботов. Целью изобретения является упрощение процесса управления. Для перемещения каждого из последовательно соединенных звеньев 1 происходит подключение генератора импульсов к электродам соответствующего генератора 6 механических колебаний, установленного на диске перемещаемого звена. При этом к электродам, расположенным в камере этого звена, образованной эластичной оболочкой 3 и двумя смежными дисками, которая заполнена электрореологической жидкостью, эти импульсы поступают через инвертор. В результате импульсы, поступающие на генератор механических колебаний и электроды камер, находятся в противофазе. 3 ил.
Изобретение относится к робототехнике, в частности к конструкциям манипуляторов промышленных роботов,
Целью изобретения является упрощение процесса управления,
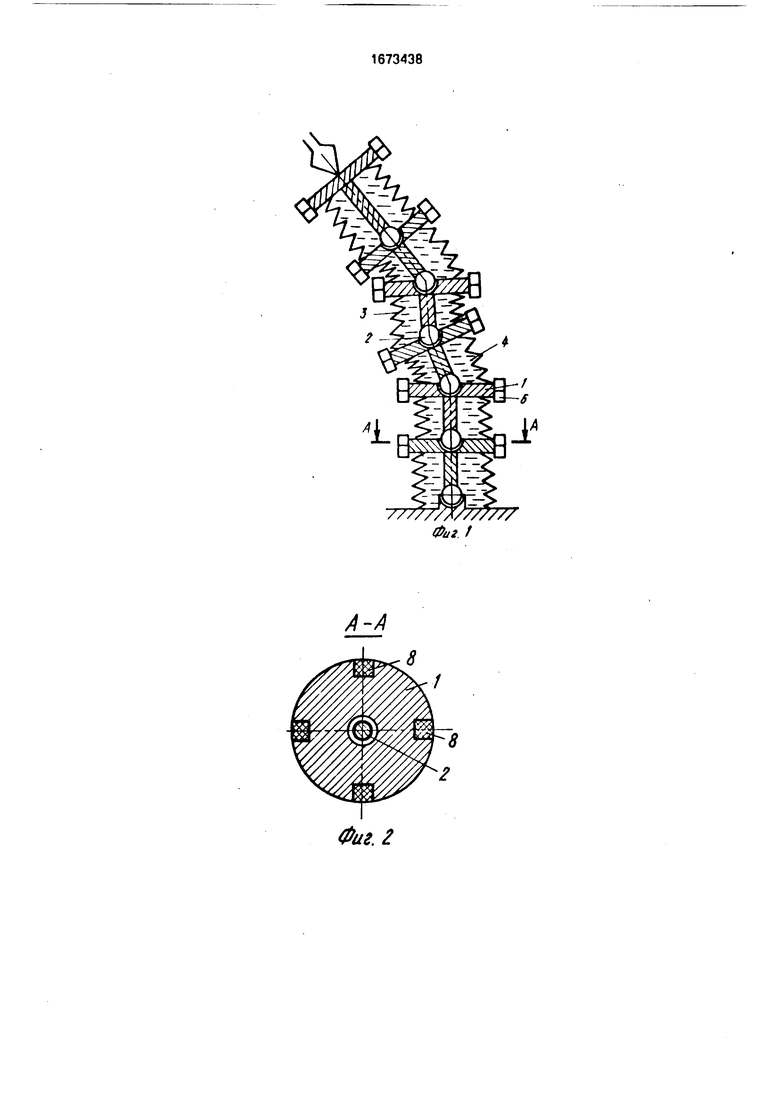
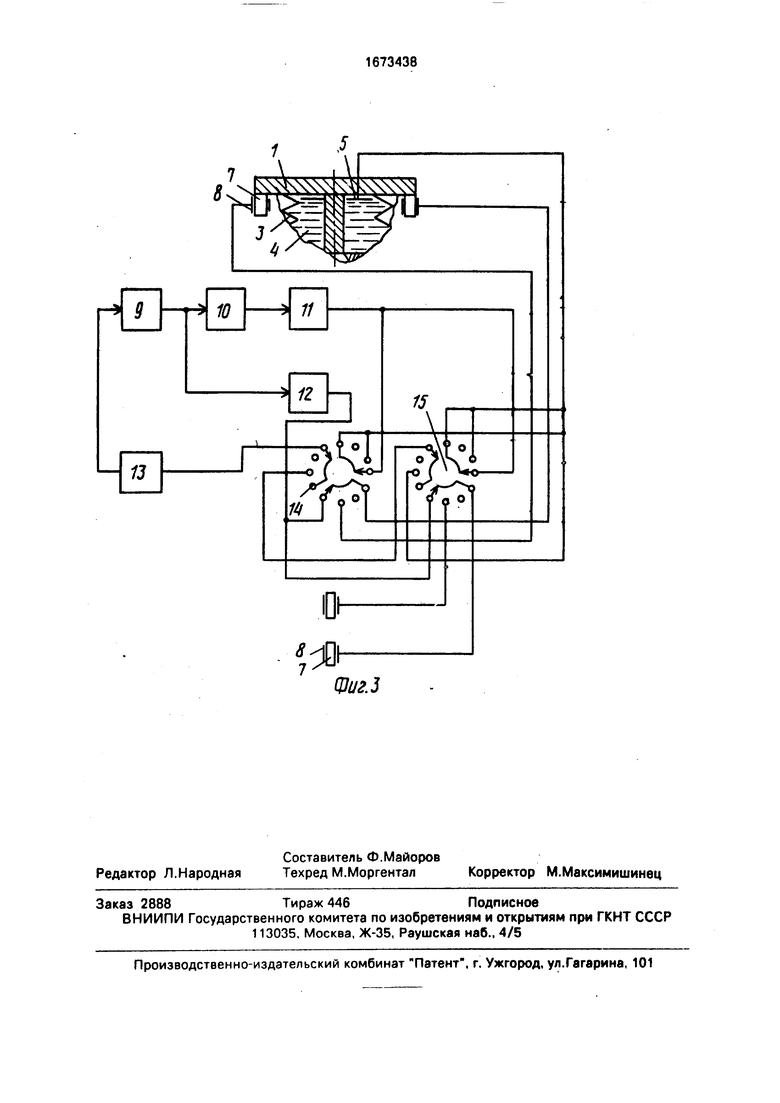
На фиг. 1 показан манипулятор, общий вид в разрезе; на фиг, 2 - сечение А-А на фиг. 1; на фиг. 3 - структурная схема системы управления перемещения манипулятора.
Манипулятор содержит звенья 1 с дисками, последовательно установленными и соединенными шарнирно друг с другом шарнирами 2. Диски смежных звеньев связаны друг с другом эластичными оболочками 3 с образованием герметичных камер между дисками звеньев и оболочками, заполненных электрореологической жидкостью 4. В камерах установлены также электроды 5. По периметру дисков звеньев установлены генераторы 6 механических колебаний.
В качестве генераторов механических колебаний могут быть использованы вибро- возбудители в виде мономорфной пластины пьезокерамики 7 с электродами 8. Пластины 7 торцами связаны с дисками звеньев и расположены попарно на диаметрально противоположных краях дисков.
Система управления манипулятором включает генератор 9 импульсов, инвертор 10, усилители 11,12 импульсов, источник 13 питания, переключатели 14, 15, в качестве которых могут быть использованы переключатели галетного типа ЗПЗН.
Две секции каждой галеты такого переключателя соединяют соответствующие электроды 8 двух пьезокерамических пластин 7 генераторов механических колебаний с генератором импульсов. Электроды 5 соединены с источником питания 13 через последовательно включенные третьи секции галетных переключателей 14 и 15, а такО xj GJ N СО
со
же через другие секции с инвертором 10 и генератором импульсов 9.
Устройство работает следующим образом.
В исходном положении звенья манипу- лятора неподвижны, переключатели 14 и 15 находятся в среднем положении, электроды 5 каждого звена связаны с источником 13 питания, электрореологическая жидкость 4 в каждой полости находится в твердом со- стоянии, фиксируя тем самым.звенья 1 друг относительно друга. Для изменения конфигурации манипулятора перемещается какое- либо из звеньев. Для этого переключатель, связанный с электродами 8 генератора меха- нических колебаний, расположенного на диске перемещаемого звена со стороны, определяемой направлением требуемого перемещения, переводится в крайнее положение. При этом происходит подключение генератора 9 импульсов к указанным электродам 8, а электродов 5 в камере этого же звена - к инвертору 10.
В результате импульсы, поступающие на генератор механических колебаний 6 и на электроды 5 электрореологической жидкости 4. находятся в противофазе. Когда электрический импульс поступает на электроды 5, электрореологическая жидкость находится в твердом состоянии, пьезокерамическая пла- стинка 7 сокращается, что не оказывает действия на звено, так как оно зафиксировано относительно других звеньев жидкостью. В следующий момент времени напряжение с электродов 5 снимается, электрореологиче- екая жидкость в жидком состоянии, пьезокерамическая пластинка 7 увеличивает линейные размеры, при этом происходит незначительное перемещение звена. При подаче электрических импульсов с определенной
частотой перемещения звена будут происходить непрерывно.
Для остановки и фиксации манипулятора переключатель 14 переводится в исходное среднее положение. Для изменения направления движения переключатель переводится в другое крайнее положение, подключая тем самым расположенный на противоположном крае диска генератор механических колебаний к генератору электрических импульсов и электроды 5 этого эвена - к инвертору 10.
Для перемещения звена 1 в направлении, перпендикулярном предыдущему, используется переключатель 15, подключающий какой-либо из двух расположенных на противоположных краях диска не задействованных ранее генераторов механических колебаний.
Аналогично работают системы управления всех остальных звеньев.
Формула изобретения Рука манипулятора, содержащая последовательно расположенные и шарнирно связанные между собой звенья, на которых установлены генераторы механических колебаний и устройства для фиксации звеньев, а также систему управления, отличающаяся тем, что, с целью упрощения процесса управления, звенья снабжены дисками, эластичными оболочками и электродами, а устройства для фиксации звеньев выполнены в виде герметичных камер, образованных дисками смежных звеньев и эластичными оболочками, установленными между этими дисками, при этом камеры заполнены электрореологической жидкостью и в них установлены электроды, а генераторы механических колебаний расположены по периметру каждого диска.
А-А
Фиг. 2
JL
77777УЛ/7/777/
Фиг t
| Манипулятор | 1983 |
|
SU1171307A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
