



Изобретение относится к сельскому хозяйству, к промышленному и селекционному животноводству. Цель изобретения - повышение оперативности управления. Когда животное подходит к выпоечному устройству, блок 1 идентифицирует его и через блок 3 задания нормируемой величины контролируемого параметра направляет в блок 4 требуемую информацию. Блок 2 измеряет величину контролируемого параметра. Сравнение заданной и требуемой величины контролируемого параметра и вычисление их отношения производит блок 4. Сравнение заданного значения отношения и определенного осуществляет блок 6. Блок 7 памяти хранит данные о параметрах последнего выпоенного животного и направляет их в анализирующий блок 8. Если для последних трех животных параметры вышли за допустимые пределы, то блок 8 дает команду блоку 9 оповещения, сигнализующему о нарушении в системе выпоечных аппаратов. Кроме того, сигнал поступает в блок 10 управления исполнительными механизмами системы выпоечных аппаратов и ограждающего их оборудования. Это вызывает либо прекращение подачи молока в аппарате, либо закрытие их ограждающими элементами, препятствующими доступу животных к аппаратам. В качестве контролируемого параметра используют длительность кормления животного или скорость высасывания корма животным из аппарата. 2 с и 5 з.п. ф-лы, 7 ил.
Pue.f
X
Изобретение относится к сельскому хозяйству, в частности к области промышленного и селекционного животноводства.
Целью изобретения является повышение оперативности управления.
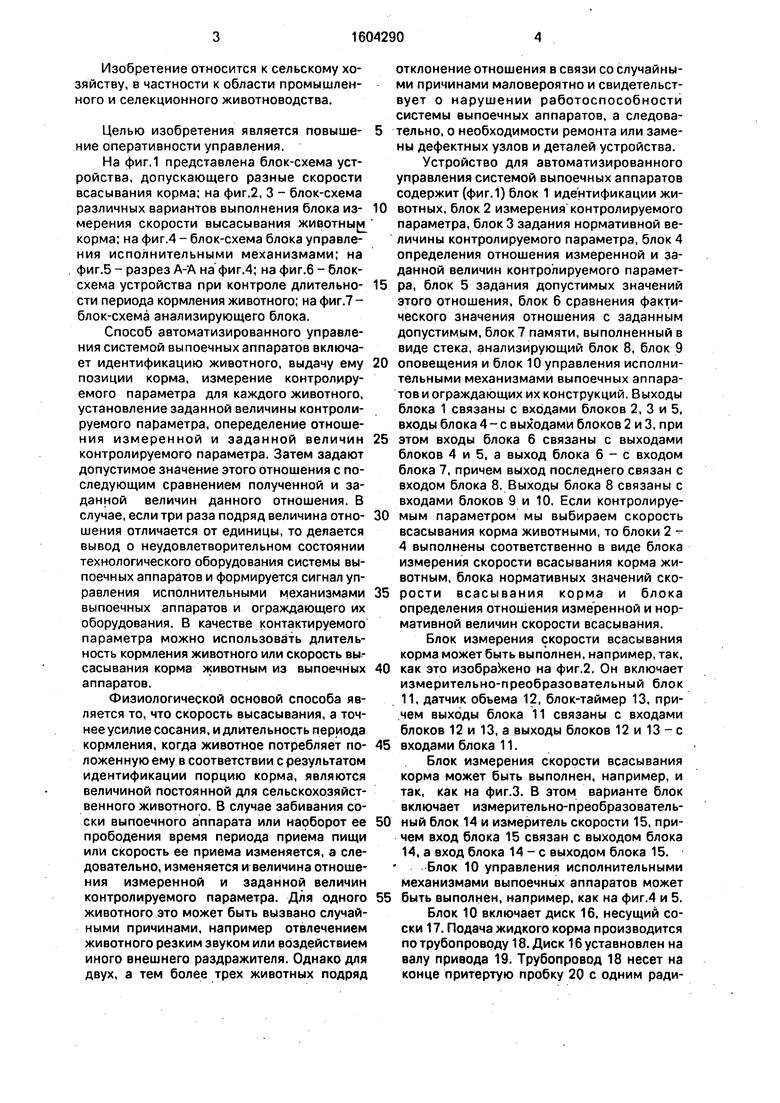
На фиг.1 представлена блок-схема устройства, допускающего разные скорости всасывания корма; на фиг.2, 3 - блок-схема различных вариантов выполнения блока измерения скорости высасывания животным корма; на фиг.4 - блок-схема блока управления исполнительными механизмами; на фиг.5 - разрез А-А на фиг.4; на фиг.6 - блок- схема устройства при контроле длительности периода кормления животного; на фиг.7- блок-схема анализирующего блока.
Способ автоматизированного управления системой выпоечных аппаратов включает идентификацию животного, выдачу ему позиции корма, измерение контролируемого параметра для каждого животного, установление заданной величины контролируемого параметра, опеределение отношения измеренной и заданной величин контролируемого параметра. Затем задают допустимое значение этого отношения с последующим сравнением полученной и заданной величин данного отношения. В случае, если три раза подряд величина отношения отличается от единицы, то делается вывод о неудовлетворительном состоянии технологического оборудования системы выпоечных аппаратов и формируется сигнал управления исполнительными механизмами выпоечных аппаратов и ограждающего их оборудования. В качестве контактируемого параметра можно использовать длительность кормления животного или скорость высасывания корма животным из выпоечных аппаратов.
Физиологической основой способа является то, что скорость высасывания, а точнее усилие сосания, и длительность периода кормления, когда животное потребляет положенную ему в соответствии с результатом идентификации порцию корма, являются величиной постоянной для сельскохозяйственного животного. В случае забивания соски выпоечного аппарата или наоборот ее прободения время периода приема пищи или скорость ее приема изменяется, а следовательно, изменяется и величина отношения измеренной и заданной величин контролируемого параметра. Для одного животного это может быть вызвано случайными причинами, например отвлечением животного резким звуком или воздействием иного внешнего раздражителя. Однако для двух, а тем более трех животных подряд
отклонение отношения в связи со случайными причинами маловероятно и свидетельствует о нарушении работоспособности системы выпоечных аппаратов, а следовательно, о необходимости ремонта или замены дефектных узлов и деталей устройства. Устройство для автоматизированного управления системой выпоечных аппаратов содержит (фиг. 1) блок 1 идентификации жи0 вотных, блок 2 измерения контролируемого параметра, блок 3 задания нормативной величины контролируемого параметра, блок 4 определения отношения измеренной и заданной величин контролируемого парамет5 ра, блок 5 задания допустимых значений этого отношения, блок 6 сравнения фактического значения отношения с заданным допустимым, блок 7 памяти, выполненный в виде стека, анализирующий блок 8, блок 9
0 оповещения и блок 10 управления исполнительными механизмами выпоечных аппаратов и ограждающих их конструкций. Выходы блока 1 связаны с входами блоков 2, 3 и 5, входы блока 4 - с выходами блоков 2 и 3, при
5 этом входы блока 6 связаны с выходами блоков 4 и 5, а выход блока 6 - с входом блока 7, причем выход последнего связан с входом блока 8. Выходы блока 8 связаны с входами блоков 9 и 10. Если контролируе0 мым параметром мы выбираем скорость всасывания корма животными, то блоки 2 - 4 выполнены соответственно в виде блока измерения скорости всасывания корма животным, блока нормативных значений ско5 рости всасывания корма и блока определения отношения измеренной и нормативной величин скорости всасывания.
Блок измерения скорости всасывания корма может быть выполнен, например, так,
0 как это изoбpakeнo на фиг.2. Он включает измерительно-преобразовательный блок 11, датчик объема 12, блок-таймер 13, при- .чем выходы блока 11 связаны с входами блоков 12 и 13, а выходы блоков 12 и 13 - с
5 входами блока 11.
Блок измерения скорости всасывания корма может быть выполнен, например, и так, как на фиг.З. В этом варианте блок включает измерительно-преобразователь0 ный блок 14 и измеритель скорости 15, причем вход блока 15 связан с выходом блока 14, а вход блока 14 - с выходом блока 15.
Блок 10 управления исполнительными механизмами выпоечных аппаратов может
5 быть выполнен, например, как на фиг.4 и 5. Блок 10 включает диск 16, несущий соски 17. Подача жидкого корма производится по трубопроводу 18. Диск 16 уставновлен на валу привода 19. Трубопровод 18 несет на конце притертую пробку 20 с одним радиальным отверстием, образующую совместно с гнездом в диске 16 кран. Соски 17 соединены с гнездом, в котором расположена пробка 20 каналами 21. Если в качестве контролируемого параметра используется длительность кормления животного, то блоки 2 - 4 выполнены в виде блока измерения длительности кормления, блока задания нормативной длительности кормления и блока определения отношения измеренной и заданной длительности кормления, а устройство снабжено блоком 22 управления дозаторами корма, вход которого соединен с соответствующим выходом блока 1 идентификации животного. Анализирующий блок 8 включает блок 23 (И), блок 24 (ИЛИ), блок 25 выработки управляющего сигнала, блок-ключ 26, блок 27 выбора отклонений. Входы блоков 23 и 24 соединены с выходом блока 8 памяти. Выходы блока 23 связаны с входами блоков 25 и 26, выход блока 24 - с входом блока 26. Входы блока 27 соединены с выходами блоков В и 26, а выход - с входом блока 10. Выходы блока 25 соединены с входами блоков 9 и 10.
Устройство работает следующим образом.
Когда животное начинает сосать, блок 1 идентифицирует его и направляет сигнал в блоки 22 и 3, из последнего блока норматив- ное для данного животного значение скорости высасывания или длительности кормления поступает в блок 4. Блок 22 определяет необходимую для данного животного дозу корма и дает сигнал на ее выдачу. 3 Одновременно сигнал от блока 1 идет и на блок 2, который измеряет фактическую скорость высасывания или длительность кормления животного, которая из блока 2 поступает также в блок 4, который опреде- 4 ляет отношение измеренной и нормативной величин контролируемого параметра и отправляет результат в блок 6. Туда же, по сигналу из блока 1, поступает сигнал из блока 5, т.е. поступает допустимое значение 4 отношения скоростей или длительностей кормления. Блок 6 сравнивает их направляет результат в блок 7 памяти. Блок 7 памяти, стек, имеет по меньшей мере 3 ячейки. По получении сигнала от блока 6 он записы- 5 вает сигнал в первую ячейку, ранее находившийся в этой ячейке сигнал переписывает в следующую и т.д. Сигнал, находившийся в последней ячейке, стирается. После этого содержимое ячеек стека направляется в 55 анализирующий блок 8, который выявляет, имеются ли три подряд превышения допустимых скоростей высасывания. Если такое имеется, анализирующий блок 8 направляет сигнал в блок 9 оповещения, оповещающий
5 0 5
оператора о неполадках в системе выпоечных аппаратов. Одновременно анализирующий блок 8 направляет сигнал на блок 10 управления исполнительными механизмами, который в зависимости от конструкции выпоечного устройства и самого блока может дать команду на промывку соски под давлением на замену соски, на прекращение доступа животным к неисправной соске впредь до устранения ее неисправности и т.п.
Блок 2 g первом варианте, когда контролируется скорость высасывания корма, работает следующим образом. При получении сигнала от блока 1 блок 11 дает команду блоку 12 на измерение объема корма, еще не высосанного животным, а также запускает блок 13. По мере течения времени, данные о котором поступают из блока 13, блок 11 еще раз и еще раз дает команду блоку 12 на измерение оставшихся к определеннь1м моментам времени объемов корма. По этим данным объема и времени блок 11 вычисляет скорость высасывания и направляет ее в блок 4.
Блок 2 во втором варианте при контроле скорости высасывания корма животным работает следующим образом. При получении сигнала от блока 1 блок 14 дает команду блоку 15 на измерение скорости высасывания. Блок 15 может быть выполнен в виде крыльчатки или любого другого измерителя скорости протекания жидкости через трубку. Данные о скорости высасывания блок 15 передает в блок 14, который преобразовывает, их в необходимую форму и передает блоку 4.
Блок 10.управления исполнительными механизмами работает следующим образом.
Корм по трубопроводу 18 подается к той же соске 17, канал 21 которой сообщается с каналом пробки 20. При получении сигнала на замену соски (он поступает от анализирующего блока 8) привод 19 поворачивает диск 16. При этом соска, требующая замены, выводится из контакта с каналом пробки 20, а в сообщение с этим каналом приходит другая соска 17. Таким образом, дефектная.- соска выводится из работы, а вводится в работу новая соска.
Анализирующий блок 8 работает следующим образом.
Сигнал от блока 7 поступает на блоки 23 и 24. Блок 23 определяет, имеются ли отклонения для трех животных подряд - это блок логического элемента И. В том случае, если имеются, то сигнал от блока 23 идет на блок 25, который вырабатывает управляющий сигнал, идущий в блоки оповещения 9 и управления положительными механизмами
В том случае, если отклонений для трех животных подряд не имеется, блок 23 посы- лает сигнал в блок 26, отпирая его. При этом сигнал от блока 7, пришедший в блок 24, анализируется им. Блок 24 (логический элемент ИЛИ) определяет, есть ли хотя бы одно животное, для которого имеется откло- нение, и, если таковые есть, передает сигнал на блок 26, также отпирая его. После такого двойного отпирания блок 26 включает в работу блок- 27, который выбирает из числа поступивших данных данные о живо- тном, режим которого отклоняется от нормативного, и направляет их в блок 9 оповещения.
Следует отметить, что устройство позволяет не только установить факт наличия неисправновностей в системе выпойки животных, но и выявить заболевшее животное. Например, если длительность кормления и его скорость одного животного уменьшилась ниже допустимого предела, то блок 10 оповещает оператора, что данное животное требует особого внимания.
Предложенные способ и устройство для его реализации позволяют повысить эффективность процесса кормления и оператив- ность диагностики неисправностей в системе выпоечных аппаратов и выявленных животных с физиологическими и патологическими отклонениями.
Формула изобретения
величин контролируемого параметра выполнены соответственно в виде блока измерения длительности кормления, блока задания длительности кормления и блока определения отношения измеренной и заданной длительности кормления.
Фиг. 2
/4
Фиг. J
J8 16
f4
Jl/I
77 Ю
17
Фиг.
величины контролируемого параметра и блока определения отношения измеренной и заданной величин контролируемого параметра использованы соответственно блок измерения скорости высасывания корма животным,блок нормативных значений скорости высасывания корма и блок определения отношения измеренной и нормативной скоростей высасывания корма.
J7
Фие.5
фиг. 6
| Устройство автоматизированной оценки физиологического состояния животных в процессе кормления | 1986 |
|
SU1526616A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
